






整车七自由度主动悬架模型
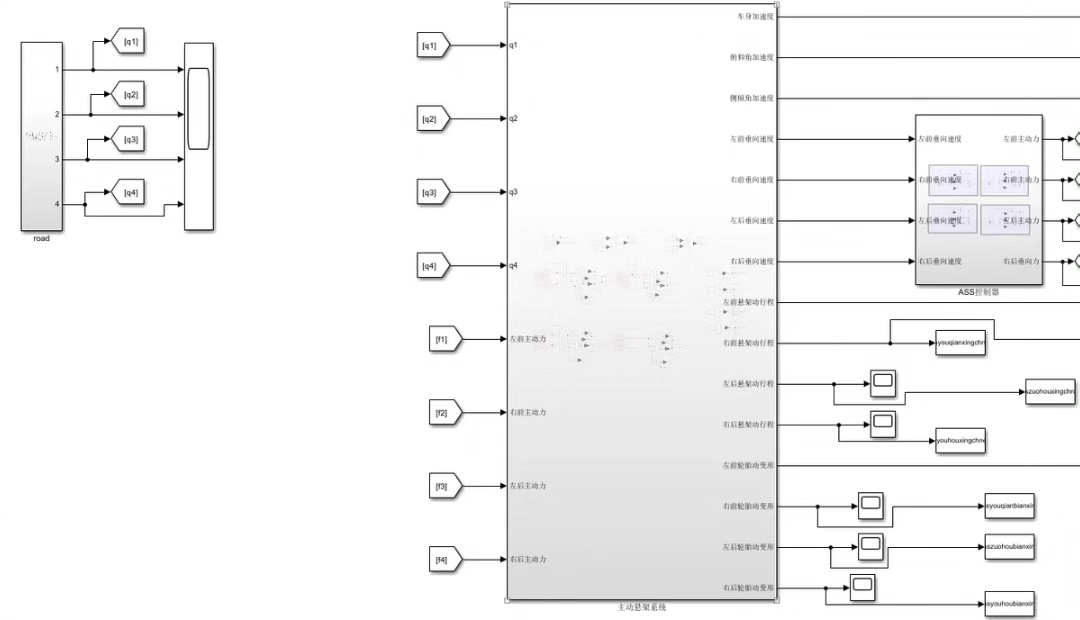
基于simulik搭建的整车七自由度主动悬架模型,采用模糊PID控制策略,以悬架主动力输入为四轮随机路面,输出为平顺性评价指标垂向加速度等,悬架主动力为控制量,车身垂向速度为控制目标。
内容包括模型源文件,参考文献。
ID:12170781818926556
负负得正
基于Simulink的整车七自由度主动悬架模型:模糊PID控制策略的应用分析
一、引言
随着汽车工业的快速发展,车辆行驶平顺性成为了研究的热点问题。主动悬架系统作为提升车辆行驶品质的关键技术,受到了广泛关注。本文基于Simulink搭建的整车七自由度主动悬架模型,采用模糊PID控制策略,对模型的构建原理、控制策略及性能表现进行深入探讨。
二、整车七自由度主动悬架模型概述
在Simulink环境下,我们构建了整车七自由度主动悬架模型。这七自由度包括车身的垂直运动、俯仰运动、侧倾运动以及四个车轮的垂直运动和转动。主动悬架系统作为连接车身和车轮的重要部件,其性能直接影响到车辆的行驶平顺性。因此,建立精确的主动悬架模型对研究车辆行驶性能具有重要意义。
三、模糊PID控制策略的应用
在主动悬架模型中,我们采用了模糊PID控制策略。该策略以悬架主动力为输入,四轮随机路面为激励源,通过调整PID控制器的参数,使车身的垂向加速度等平顺性评价指标达到最优。模糊PID控制策略能够根据实时输入的悬架主动力和路面情况,自动调整PID控制器的参数,从而提高系统的自适应能力。
四、模型源文件及参考文献
模型的构建过程中,我们参考了相关的文献资料和工程实践经验。模型源文件包括Simulink模型文件、控制策略文件等。参考文献主要包括国内外关于主动悬架系统、模糊PID控制策略的研究论文、技术报告等。这些文献为我们提供了宝贵的理论依据和实践经验,为模型的构建提供了有力的支持。
五、模型性能分析
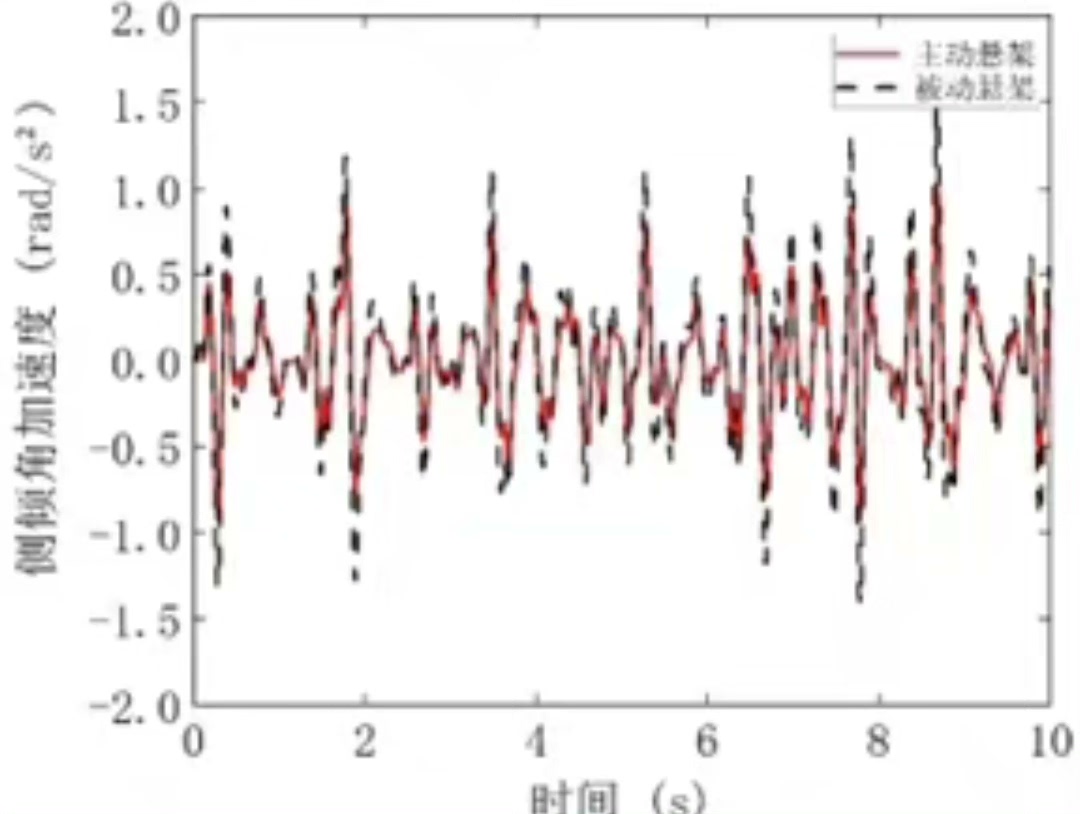
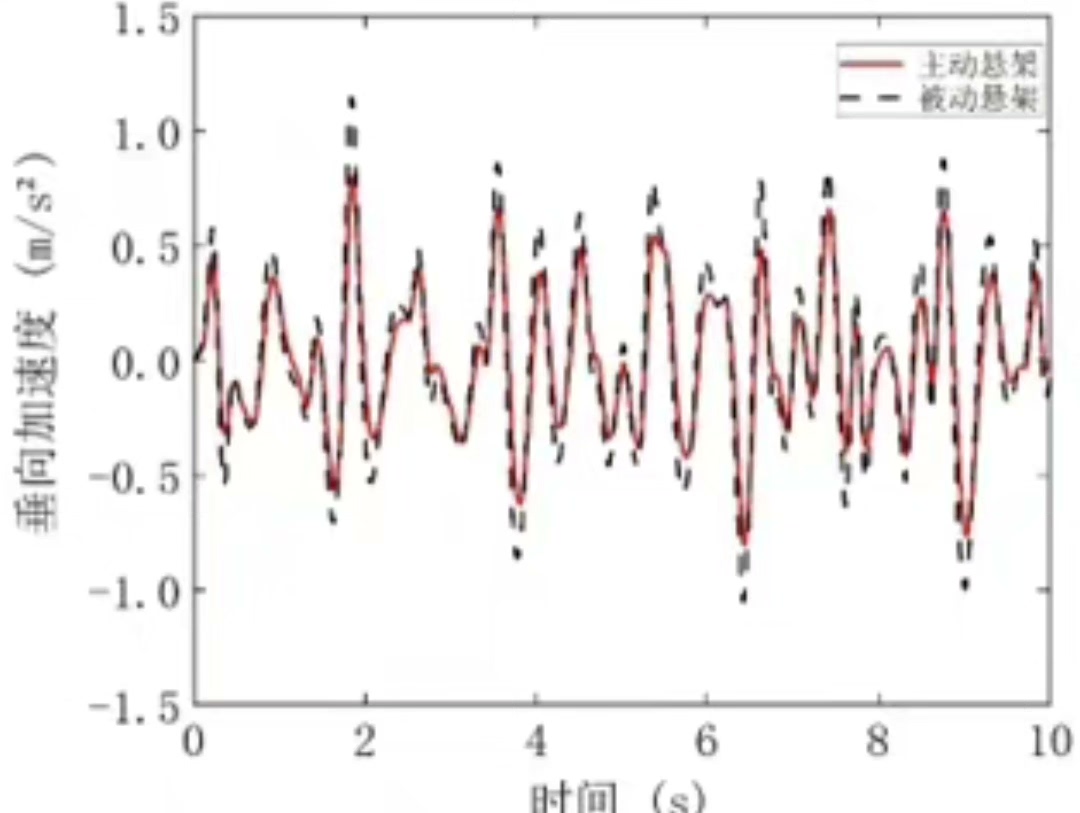
采用模糊PID控制策略的整车七自由度主动悬架模型,在Simulink环境下进行了仿真测试。结果表明,该模型能够有效地提高车辆的行驶平顺性,降低车身的垂向加速度等平顺性评价指标。同时,该模型具有良好的稳定性和鲁棒性,能够适应不同的路面条件和车辆负载情况。
六、结论
本文基于Simulink环境,构建了整车七自由度主动悬架模型,并采用了模糊PID控制策略。通过对模型的构建原理、控制策略及性能表现进行深入分析,得出该模型能够有效地提高车辆的行驶平顺性,具有良好的稳定性和鲁棒性。该模型为车辆主动悬架系统的研究提供了有力的工具,为车辆行驶品质的提升提供了理论支持。
七、展望
未来,我们将进一步研究模糊PID控制策略在主动悬架系统中的应用,探索更加先进的控制算法和模型优化方法。同时,我们也将关注车辆行驶过程中的其他性能指标,如操控稳定性、安全性等,为车辆综合性能的提升做出更多贡献。
总之,基于Simulink的整车七自由度主动悬架模型及模糊PID控制策略的研究,对于提高车辆行驶品质、推动汽车工业的发展具有重要意义。
相关的代码,程序地址如下:http://matup.cn/781818926556.html
















 920
920

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









