







 本文深入探讨了飞行时间(TOF)深度相机的工作原理,包括脉冲调制和连续波调制两种方法,分析了各自的优缺点,并提及在实际应用中的设备示例,如微软的Kinect 2。TOF相机在远距离测量中表现出优越性,但在近距离高精度测量上存在挑战。
本文深入探讨了飞行时间(TOF)深度相机的工作原理,包括脉冲调制和连续波调制两种方法,分析了各自的优缺点,并提及在实际应用中的设备示例,如微软的Kinect 2。TOF相机在远距离测量中表现出优越性,但在近距离高精度测量上存在挑战。
本文已经首发在个人微信公共号:计算机视觉life(微信号CV_life),欢迎关注!
深度相机按照深度测量原理不同,一般分为:飞行时间法、结构光法、双目立体视觉法。本文就来说一说飞行时间法。
飞行时间是从Time of Flight直译过来的,简称TOF。其基本原理是通过连续发射光脉冲(一般为不可见光)到被观测物体上,然后接收从物体反射回去的光脉冲,通过探测光脉冲的飞行(往返)时间来计算被测物体离相机的距离。
TOF法根据调制方法的不同,一般可以分为两种:脉冲调制(Pulsed Modulation)和连续波调制(Continuous Wave Modulation)。
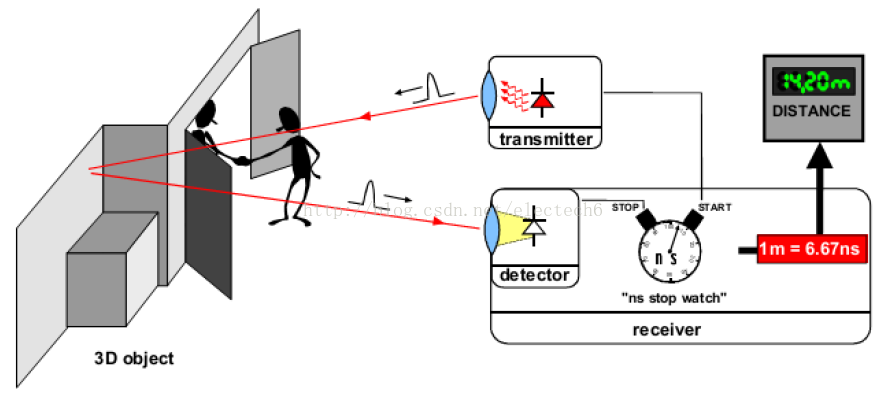
飞行时间法深度测量基本原理示意图
脉冲调制
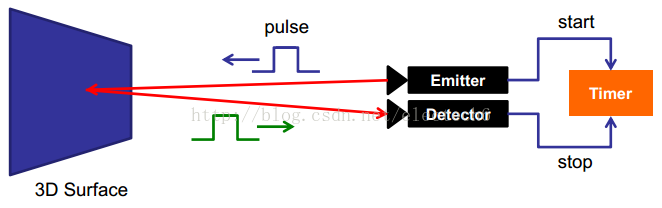
脉冲调制方案的原理比较简单,如下图所示。它直接根据脉冲发射和接收的时间差来测算距离。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 278
278

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









