










一.L1/L2/smooth_l1_loss/center_loss公式与代码
1.公式
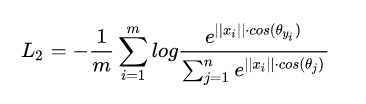
L2公式:![]()
smooth_L1公式:
2.三种函数numpy代码实现
import numpy as np
import matplotlib.pyplot as plt
#y = |x|
def L1():
x = np.arange(-2, 2, 0.01)
y = abs(x)
plt.figure()
plt.plot(x, y, 'b', label='l1')
# plt.show()
#y = x^2
def L2():
x = np.arange(-2, 2, 0.01)
y = x**2
plt.plot(x, y, 'g', label='l2')
# plt.show()
#y = 0.5*x**2 |x|<=1
#y = |x|-0.5 |x|>1
def smooth_l1():
x = np.arange(-2, 2, 0.01)
t = abs(x)
y = np.where(t <= 1, 0.5*t**2, t-0.5)
plt.plot(x, y, 'r', label='smooth_l1')
plt.legend(loc='best')
plt.show()
if __name__ == '__main__':
L1()
L2()
smooth_l1()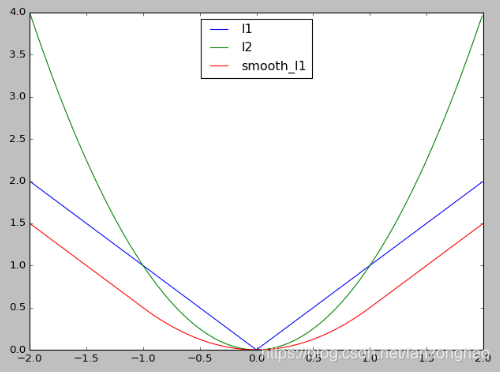
可看出,L1在0点处导数不唯一,会影响收敛,smooth L1对于离群点更加鲁棒,即:相比于L2损失函数,其对离群点、异常值(outlier)不敏感,梯度变化相对更小.也就是当预测框与gt相差过大时,梯度值不至于很大,当预测框与gt相差较小时,梯度值足够小.
3.tensorflow实现smoothL1函数
函数:
def smooth_l1_loss(y_true, y_pred):
"""Implements Smooth-L1 loss.
y_true and y_pred are typically: [N, 4], but could be any shape.
"""
diff = tf.abs(y_true - y_pred)
less_than_one = tf.cast(tf.less(diff, 1.0), "float32")
loss = (less_than_one * 0.5 * diff**2) + (1 - less_than_one) * (diff - 0.5)
print(loss)
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
print(sess.run(loss))
return loss
4.softmax的交叉熵loss

代码:
import torch.nn as nn
import torch.nn.functional as F
import torch
class L(nn.Module):
def __init__(self):
super(L, self).__init__()
def forward(self, out, label):
loss = F.cross_entropy(out, label)
return loss
def debug_softmax_loss():
batch_size = 4
class_nums = 10
label = torch.tensor([1, 2, 3, 1])
out = torch.rand(batch_size, class_nums)
criterion = L()
cost = criterion(out, label)
print('==cost:', cost)
if __name__ == '__main__':
debug_softmax_loss()![]()
5.Modified Softmax loss
目的:去除权重模长和偏置对loss的影响
代码:
class Modified(nn.Module):
def __init__(self):
super(Modified, self).__init__()
self.weight = nn.Parameter(torch.Tensor(2, 10)) # (input,output)
nn.init.xavier_uniform_(self.weight)
self.weight.data.uniform_(-1, 1).renorm_(2, 1, 1e-5).mul_(1e5)#对列进行归一化
# 因为renorm采用的是maxnorm,所以先缩小再放大以防止norm结果小于1
def forward(self, x, label):
w = self.weight
w = w.renorm(2, 1, 1e-5).mul(1e5)#对列进行归一化
out = x.mm(w)
loss = F.cross_entropy(out, label)
return loss
def debug_Modified_softmax_loss():
batch_size = 4
feature_nums = 2
label = torch.tensor([1, 2, 3, 1])
feature = torch.rand(batch_size, feature_nums)
criterion = Modified()
cost = criterion(feature, label)
print('==cost:', cost)
if __name__ == '__main__':
# debug_softmax_loss()
debug_Modified_softmax_loss()![]()
6.normFace loss
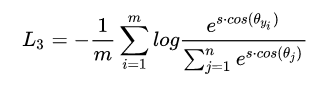
在上述loss的基础上去除feature模长的影响
class NormFace(nn.Module):
def __init__(self):
super(NormFace, self).__init__()
self.weight = nn.Parameter(torch.Tensor(2, 10)) # (input,output)
nn.init.xavier_uniform_(self.weight)
self.weight.data.uniform_(-1, 1).renorm_(2, 1, 1e-5).mul_(1e5)
self.s = 16
# 因为renorm采用的是maxnorm,所以先缩小再放大以防止norm结果小于1
def forward(self, x, label):
cosine = F.normalize(x).mm(F.normalize(self.weight, dim=0))
loss = F.cross_entropy(self.s * cosine, label)
return loss
def debug_norm_loss():
batch_size = 4
feature_nums = 2
label = torch.tensor([1, 2, 3, 1])
feature = torch.rand(batch_size, feature_nums)
criterion = NormFace()
cost = criterion(feature, label)
print('==cost:', cost)
if __name__ == '__main__':
# debug_softmax_loss()
# debug_Modified_softmax_loss()
debug_norm_loss()![]()
7.InsightFace(ArcSoftmax) loss

class ArcMarginProduct(nn.Module):
def __init__(self, s=32, m=0.5):
super(ArcMarginProduct, self).__init__()
self.in_feature = 2
self.out_feature = 10
self.s = s
self.m = m
self.weight = nn.Parameter(torch.Tensor(2, 10)) # (input,output)
nn.init.xavier_uniform_(self.weight)
self.weight.data.renorm_(2, 1, 1e-5).mul_(1e5)
self.cos_m = math.cos(m)
self.sin_m = math.sin(m)
# # 为了保证cos(theta+m)在0-pi单调递减:
# self.th = math.cos(3.1415926 - m)
# self.mm = math.sin(3.1415926 - m) * m
def forward(self, x, label):
cosine = F.normalize(x).mm(F.normalize(self.weight, dim=0))
cosine = cosine.clamp(-1, 1) # 数值稳定
sine = torch.sqrt(torch.max(1.0 - torch.pow(cosine, 2), torch.ones(cosine.shape) * 1e-7)) # 数值稳定
##print(self.sin_m)
phi = cosine * self.cos_m - sine * self.sin_m # 两角和公式( cos(theta+m) )
# # 为了保证cos(theta+m)在0-pi单调递减:
# phi = torch.where((cosine - self.th) > 0, phi, cosine - self.mm)#必要性未知
#
one_hot = torch.zeros_like(cosine)
one_hot.scatter_(1, label.view(-1, 1), 1)
output = (one_hot * phi) + ((1.0 - one_hot) * cosine)
output = output * self.s
loss = F.cross_entropy(output, label)
return output, loss
def debug_insight_loss():
batch_size = 4
feature_nums = 2
label = torch.tensor([1, 2, 3, 1])
feature = torch.rand(batch_size, feature_nums)
criterion = ArcMarginProduct()
_, cost = criterion(feature, label)
print('==cost:', cost)
if __name__ == '__main__':
# debug_softmax_loss()
# debug_Modified_softmax_loss()
# debug_norm_loss()
debug_insight_loss()![]()
8.center loss
中心损失函数公式: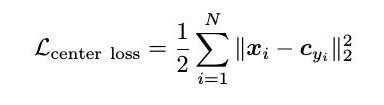
其中c_yi为第yi类训练样本深度特征的均值点。
由于中心点损失函数值考虑类内差异性,而交叉熵损失函数只考虑类间差异性,一般会把中心损失函数和交叉熵损失函数配合起来用各取所长。这样网络最终的目标函数可以表示为:
![]()
class centerloss(nn.Module):
def __init__(self):
super(centerloss, self).__init__()
self.center = nn.Parameter(10 * torch.randn(10, 2))
self.lamda = 0.2
self.weight = nn.Parameter(torch.Tensor(2, 10)) # (input,output)
nn.init.xavier_uniform_(self.weight)
def forward(self, feature, label):
batch_size = label.size()[0]
nCenter = self.center.index_select(dim=0, index=label)
distance = feature.dist(nCenter)
centerloss = (1 / 2.0 / batch_size) * distance
out = feature.mm(self.weight)
ceLoss = F.cross_entropy(out, label)
return out, ceLoss + self.lamda * centerloss
def debug_center_loss():
batch_size = 4
feature_nums = 2
label = torch.tensor([1, 2, 3, 1])
feature = torch.rand(batch_size, feature_nums)
criterion = centerloss()
_, cost = criterion(feature, label)
print('==cost:', cost)
if __name__ == '__main__':
# debug_softmax_loss()
# debug_Modified_softmax_loss()
# debug_norm_loss()
# debug_insight_loss()
debug_center_loss()9.label smooth losss
目的:平滑标签

import torch
import torch.nn as nn
import torch.nn.functional as F
class LabelSmoothLoss(nn.Module):
def __init__(self, smoothing=0.0):
super(LabelSmoothLoss, self).__init__()
self.smoothing = smoothing
def forward(self, input, target):
log_prob = F.log_softmax(input, dim=-1)#(n,classnums)
weight = input.new_ones(input.size()) * self.smoothing / (input.size(-1) - 1.)#(n,classnums)
print('==weight:', weight)
weight.scatter_(1, target.unsqueeze(-1), (1. - self.smoothing))#(n,classnums)
print('==weight:', weight)
loss = (-weight * log_prob).sum(dim=-1).mean()#(n,classnums)
return loss
def debug_label_smooth_loss():
batch_size = 4
class_num = 10
input_ = torch.rand(batch_size, class_num)
label = torch.tensor([1, 2, 3, 1])
criterion = LabelSmoothLoss(smoothing=0.1)
cost = criterion(input_, label)
print('==cost:', cost)
if __name__ == '__main__':
debug_label_smooth_loss()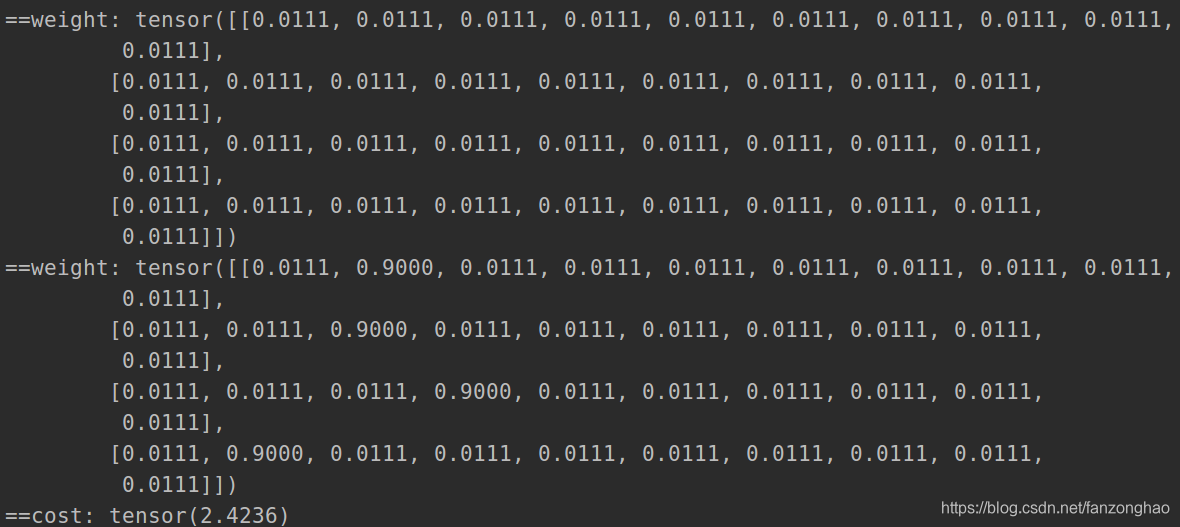
10.ohem loss
OHEM是只取3:1的负样本去计算loss,之外的负样本权重置零,而focal loss取了所有负样本,根据难度给了不同的权重。与focal loss差别在于,有些难度的负样本可能在3:1之外。
class BalanceCrossEntropyLoss(nn.Module):
'''
Balanced cross entropy loss.
Shape:
- Input: :math:`(N, 1, H, W)`
- GT: :math:`(N, 1, H, W)`, same shape as the input
- Mask: :math:`(N, H, W)`, same spatial shape as the input
- Output: scalar.
Examples::
>>> m = nn.Sigmoid()
>>> loss = nn.BCELoss()
>>> input = torch.randn(3, requires_grad=True)
>>> target = torch.empty(3).random_(2)
>>> output = loss(m(input), target)
>>> output.backward()
'''
def __init__(self, negative_ratio=3.0, eps=1e-6):
super(BalanceCrossEntropyLoss, self).__init__()
self.negative_ratio = negative_ratio
self.eps = eps
def forward(self,
pred: torch.Tensor,
gt: torch.Tensor,
return_origin=False):
'''
Args:
pred: shape :math:`(N, 1, H, W)`, the prediction of network
gt: shape :math:`(N, 1, H, W)`, the target
'''
positive = gt.byte()
negative = (1 - gt).byte()
positive_count = int(positive.float().sum())
negative_count = min(int(negative.float().sum()), int(positive_count * self.negative_ratio))
loss = nn.functional.binary_cross_entropy(pred, gt, reduction='none')
positive_loss = loss * positive.float()
negative_loss = loss * negative.float()
# negative_loss, _ = torch.topk(negative_loss.view(-1).contiguous(), negative_count)
negative_loss, _ = negative_loss.view(-1).topk(negative_count)
balance_loss = (positive_loss.sum() + negative_loss.sum()) / (positive_count + negative_count + self.eps)
if return_origin:
return balance_loss, loss
if positive_count == 0:
return loss.sum()/(int(negative.float().sum()) + self.eps)
else:
return balance_loss
二.Dice loss
1.公式
dice系数公式为:
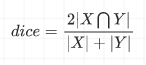
其用于评估两个样本的相似性的度量,其他距离参考这篇文章。
dice loss可以写为:
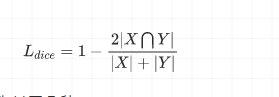
其中,dice系数的公式也可以写为
而f1 score也是这个,也就是dice loss其实是优化f1 score.
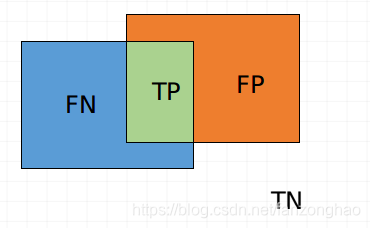
dice loss 是一种「区域相关」的loss。也就是某像素点的loss以及梯度值不仅和该点的label以及预测值相关,和其他点的label以及预测值也相关,这点和交叉熵loss 不同,正是由于这种特效,导致dice loss更关注于正样本,而交叉熵loss关注每个样本,当负样本更多时,loss主要就由负样本贡献.
class DiceLoss(nn.Module):
'''
Loss function from https://arxiv.org/abs/1707.03237,
where iou computation is introduced heatmap manner to measure the
diversity bwtween tow heatmaps.
'''
def __init__(self, eps=1e-6):
super(DiceLoss, self).__init__()
self.eps = eps
def forward(self, pred: torch.Tensor, gt, weights=None):
'''
pred: one or two heatmaps of shape (N, 1, H, W),
the losses of tow heatmaps are added together.
gt: (N, 1, H, W)
'''
return self._compute(pred, gt, weights)
def _compute(self, pred, gt, weights):
if pred.dim() == 4:
pred = pred[:, 0, :, :]
gt = gt[:, 0, :, :]
assert pred.shape == gt.shape
# assert pred.shape == mask.shape
# if weights is not None:
# assert weights.shape == mask.shape
# mask = weights * mask
intersection = (pred * gt).sum()
union = pred.sum() + gt.sum() + self.eps
loss = 1 - 2.0 * intersection / union
assert loss <= 1
return loss三.Focal loss
四.各种IOU loss
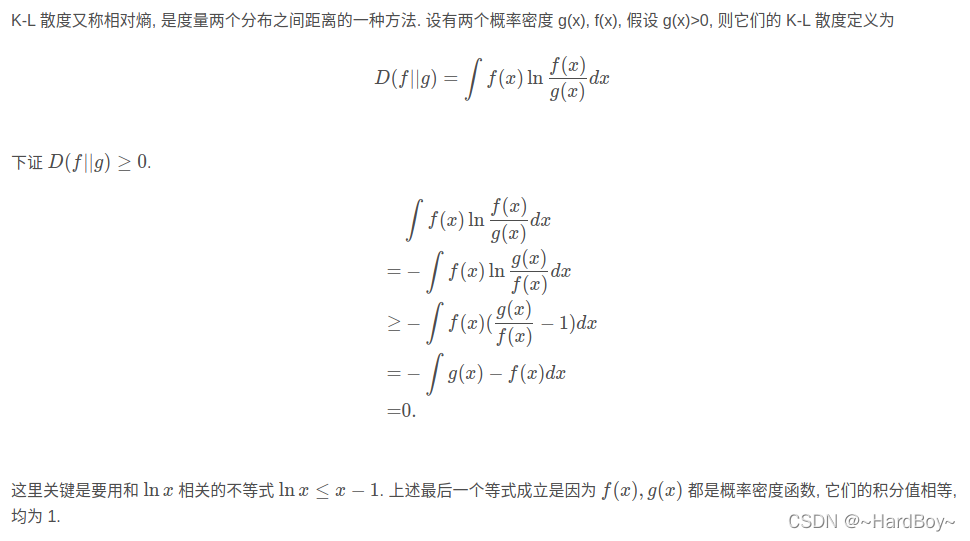
所以这里设计loss函数的时候,f(x)满足面积为1, g(x)也是,故对于g(x)需要是softmax
torch 代码:
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.autograd import Variable
from mmpose.models.registry import LOSSES
@LOSSES.register_module()
class KLDiscretLoss(nn.Module):
def __init__(self):
super(KLDiscretLoss, self).__init__()
self.LogSoftmax = nn.LogSoftmax(dim=1) # [B, LOGITS]
self.criterion_ = nn.KLDivLoss(reduction='none')
def criterion(self, dec_outs, labels):
# dec_outs [bs, dim]
# labels [bs, dim]
# import pdb; pdb.set_trace()
scores = self.LogSoftmax(dec_outs)
loss = torch.mean(self.criterion_(scores, labels), dim=1)#(bs, )
return loss
def forward(self, output_x, output_y, target_x, target_y, target_weight):
# import pdb; pdb.set_trace()
num_joints = output_x.size(1)
loss = 0
# output_x [bs, 17, 192*2]
# output_y [bs, 17, 256*2]
# target_x [bs, 17, 192*2]
# target_y [bs, 17, 256*2]
# target_weight [bs, 17]
for idx in range(num_joints):
coord_x_pred = output_x[:, idx].squeeze() #[bs, 192*2]
coord_y_pred = output_y[:, idx].squeeze() #[bs, 256*2]
coord_x_gt = target_x[:, idx].squeeze() #[bs, 192*2]
coord_y_gt = target_y[:, idx].squeeze() #[bs, 256*2]
weight = target_weight[:, idx].squeeze() #[bs, ]
# import pdb; pdb.set_trace()
loss += (self.criterion(coord_x_pred, coord_x_gt).mul(weight).mean())
loss += (self.criterion(coord_y_pred, coord_y_gt).mul(weight).mean())
return loss / num_joints
def debug():
loss = KLDiscretLoss()
target_x = torch.rand((32, 17, 192*2))
target_y = torch.rand((32, 17, 256*2))
output_x = torch.rand((32, 17, 192*2))
output_y = torch.rand((32, 17, 256*2))
target_weight = torch.ones((32, 17, 1))
cost = loss(output_x, output_y, target_x, target_y, target_weight)
print('==cost:', cost)
if __name__ == '__main__':
debug()参考:

















 2269
2269

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









