






 本文详细阐述了图像传感器尤其是CMOS技术的发展历程,介绍了CCD与CMOS的区别,重点讨论了CMOS的关键组件、性能参数以及BSI和3D堆叠技术的应用。同时提到了市场领导者如索尼、Omnivision和三星在CIS领域的角色。
本文详细阐述了图像传感器尤其是CMOS技术的发展历程,介绍了CCD与CMOS的区别,重点讨论了CMOS的关键组件、性能参数以及BSI和3D堆叠技术的应用。同时提到了市场领导者如索尼、Omnivision和三星在CIS领域的角色。
图像传感器是传感器技术中的一个重要分支,采用感光单元阵列和辅助控制电路将光学信号转变为电学信号。图像传感器的主要工作原理为利用感光二极管实现光电信号的转换,再对感光单元输出的电学信号进行加工处理,从而实现对色彩、亮度等光学信息的感知与处理。其中,每个感光单元对应图像传感器的一个像素,像素的数量与质量直接决定了图像传感器的最终成像效果。
2000年前就预测,CMOS 图像传感器将完全取代 CCD 成像设备,就像 CCD 设备在 1980 年代中期取代视频采集管一样。尽管 CMOS 在当今的成像领域占有重要地位,但它并没有完全取代 CCD 器件。另一方面,对 CMOS 技术的推动极大地增加了整个成像市场。CMOS图像传感器不仅创造了新的产品应用,但也提高了 CCD 成像设备的性能。
CIS 与 CCD
如今,有两种不同的技术可用于以数字方式捕获图像(参见图 1):
- 电荷耦合器件 (CCD) 是线性传感器,其输出与接收的光子数量直接相关
- 互补金属氧化物半导体(CMOS,或 CMOS 图像传感器的 CIS)是一种更新的并行读出技术
两种类型的成像设备都将光转换为电子(或电荷),随后可以将其处理为电子信号。CCD 旨在将电荷从一个像素移动到另一个像素,直到它们到达专用读出区域中的放大器。CMOS 图像传感器直接在像素中集成放大。更先进的 CIS 技术提供并行读出架构,其中每个像素可以单独寻址或作为一组并行读出(参见图 1)。
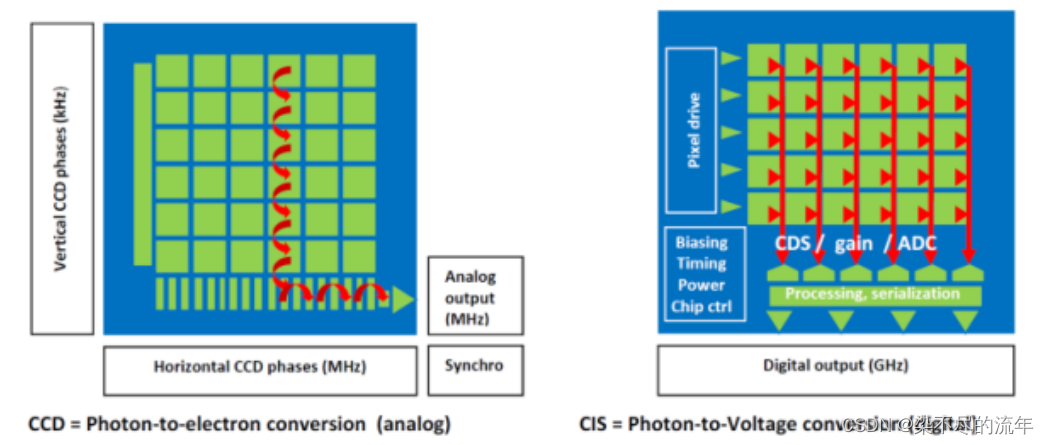 图 1:CCD = 光子到电子(模拟)转换(左)和 CIS = 光子到电压(数字)转换(右)
图 1:CCD = 光子到电子(模拟)转换(左)和 CIS = 光子到电压(数字)转换(右)
CMOS 传感器的制造成本远低于 CCD 传感器。由于新型图像传感器的价格下降,数码相机变得非常普遍且价格低廉。
CCD和CMOS架构之间的详细区别
在表 1中,我们展示了 CCD 和 CMOS 架构之间的主要区别。每个都有独特的优势和劣势,在不同的应用中提供优势(以绿色显示)。
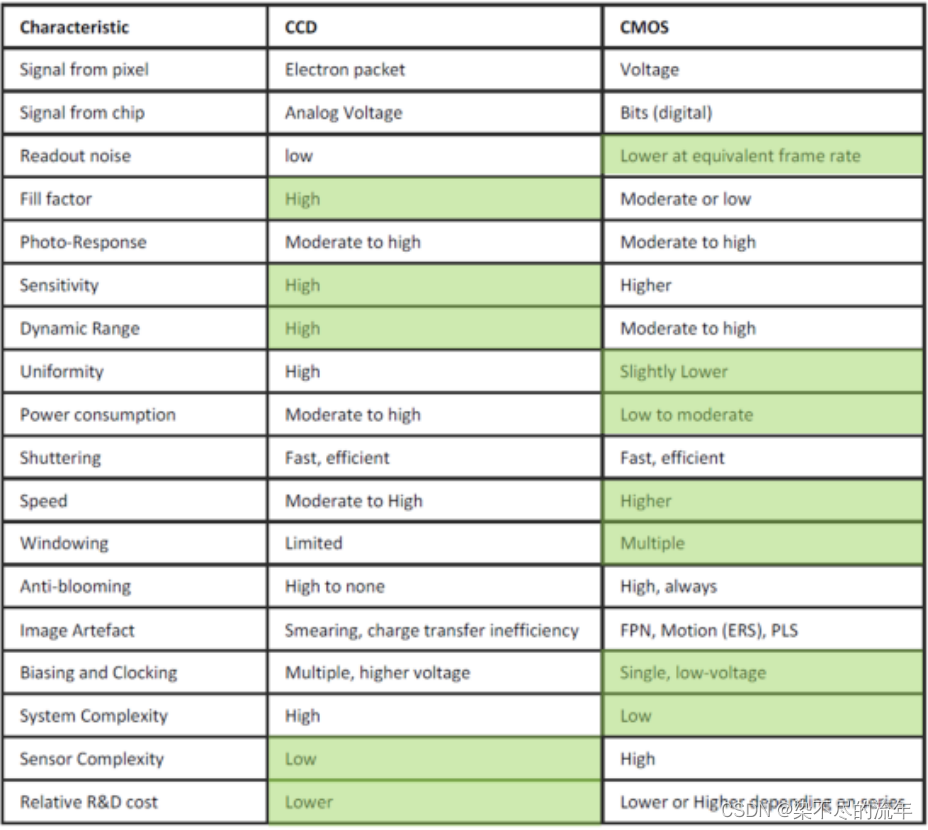 表 1:CCD 和 CMOS 架构比较(来源:e2V)
表 1:CCD 和 CMOS 架构比较(来源:e2V)
CMOS图像传感器中的关键组件
CMOS 图像传感器中有四个主要组件(见图 2):
- 光电二极管 (PD)
- 像素设计
- 彩色滤光片 (CF)
- 微透镜
光电二极管 (PD) 用于捕获光,PIN 二极管或浅 PN 结器件通常用于此目的。最广泛实施的像素设计被称为“有源像素传感器”(APS)。通常使用三到六个晶体管,它们提供增益或缓冲大列电容的像素。滤色器用于分离反射光的红色、绿色和蓝色 (RGB) 分量。最后,微透镜收集来自 CIS 非活动部分的光,并将其聚焦到光电二极管。微透镜通常具有球面和网状透镜。
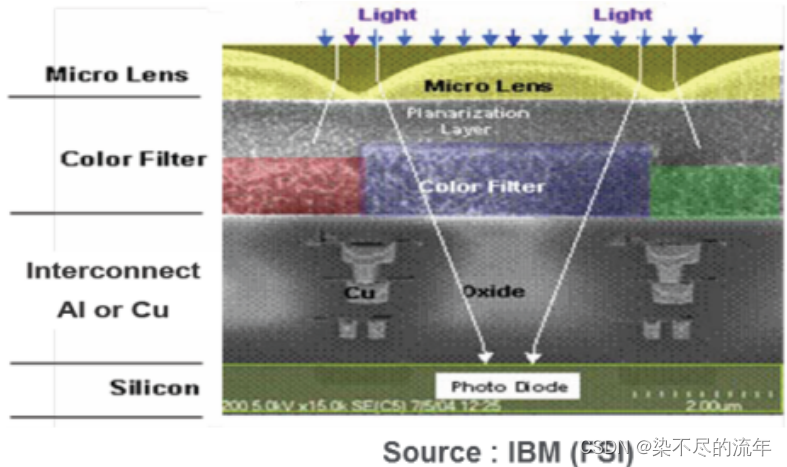 图 2:CMOS 图像传感器中的关键组件(来源 IBM,FSI)
图 2:CMOS 图像传感器中的关键组件(来源 IBM,FSI)
CMOS图像传感器性能参数
有许多参数可用于评估图像传感器的性能。我们可以使用三个主要指标对这些参数进行分类:
- 像素布局:像素数、像素间距、像素填充因子
- 像素物理:量子效率、阱容量、动态范围、转换增益、暗电流
- 像素读数:信噪比、帧速率、线性百分比、功耗、位深度、调制传递函数、快门效率
背面照明 (BSI) 与正面照明 (FSI) 技术
先进的 CMOS 图像传感器制造商正在寻求新的架构,以减小像素尺寸,同时保持或增强光电性能。较小的像素通常会带来更高的分辨率、更小的设备以及更低的功耗和成本。理想情况下,任何缩小像素尺寸的新 CIS 架构都不应降低性能或图像质量。一种较新的 CIS 架构,即背面照明 (BSI) 技术,是常用的正面照明 (FSI) 技术的一种很有前途的替代方案(参见图 3)。
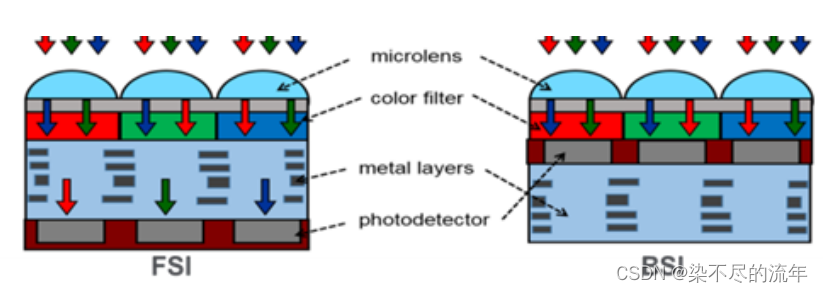
图 3:FSI 与 BSI
BSI 技术涉及将图像传感器倒置并在像素背面应用彩色滤光片和微透镜,以便传感器可以通过背面收集光线。BSI 具有较深的光电二极管和较短的光路,可实现更高的量子效率(1) (QE) 和更低的串扰(2)(参见图 4)。
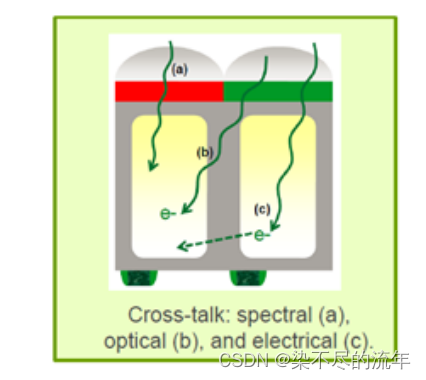
图 4:串扰
(1) QE = 转换成电子的光子百分比
(2) 电串扰 = 相邻像素之间的电荷(电子或空穴,取决于像素类型)的扩散。由于潜在的电气机制(扩散和漂移),它发生在硅材料中
BSI 工艺流程
使用背面照明架构生产 CMOS 图像传感器需要许多工艺步骤。描述两种不同 BSI 工艺流程的图表,Si-Bulk(图 5)和 SOI(图 6)如下所示:
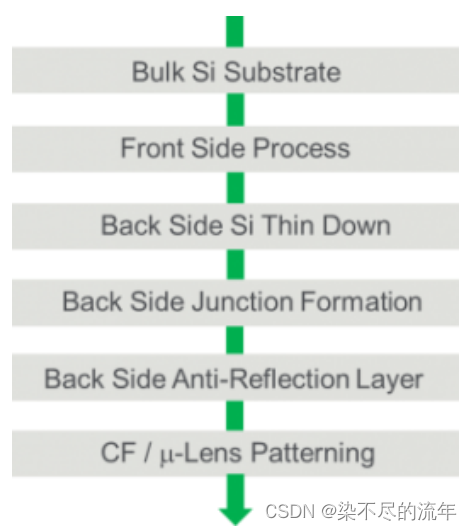
图 5:BSI Si-Bulk 简化工艺
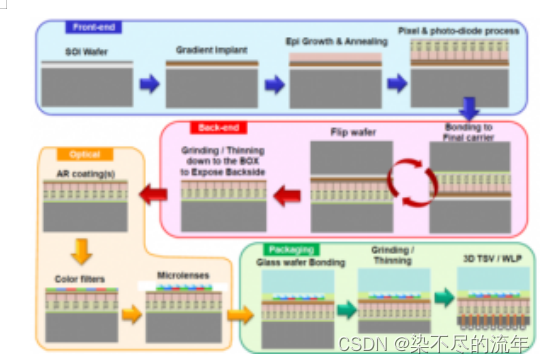
图 6:BSI SOI 工艺流程(来源:Yole
CIS 的全局快门 (GS) 与滚动快门 (RS)
“滚动快门” (RS) 是一个技术术语,指的是图像传感器扫描图像的方式。如果传感器采用 RS,这意味着图像被顺序扫描,从传感器的一侧(通常是顶部)到另一侧,逐行扫描。通常,CMOS图像传感器在RS模式下操作,其中曝光和快门操作逐行(或逐行)执行。相比之下,“全局快门”(GS)是一个技术术语,指的是可以同时扫描图像的整个区域的传感器。在 GS 传感器中,使用所有像素同时捕获图像。GS 架构包括存储器结构和额外的 MOS 晶体管以提供额外的功能。如今,大多数 CIS 成像设备都采用 GS 模式来避免失真和伪影,例如寄生光敏感度(参见图 7)。使用 GS 功能的 CMOS 图像传感器用于各种领域,包括广播、汽车、无人机和监控应用。
 图 7:滚动(左)与全局(右)快门模式
图 7:滚动(左)与全局(右)快门模式
3D 堆叠式 CIS
手机的增长是过去 5 年独联体单位出货量增长的主要驱动力。随着独联体市场收入的增长,研发支出和专利申请也在增长。这项努力导致先进的移动摄像系统包含新技术,例如:
- 用于快速自动对焦 (AF) 的相位检测像素阵列 (PDPA)
- ~1 µm 代像素,具有改进的低光灵敏度
- 先进的芯片堆叠,采用 BSI CIS 晶圆与图像信号处理器 (ISP) 晶圆结合
- 视频录制高达 4K
3D 堆叠图像传感器由 BSI 图像传感器芯片组成,面对面堆叠在逻辑芯片上。投资堆叠芯片 CIS 开发的动机因制造商而异,但可以概括为:
- 添加功能
- 减小外形尺寸
- 启用灵活的制造选项
- 促进 3D 堆栈中每个裸片的优化
索尼在 2012 年宣布了世界上第一个用于消费电子产品的堆叠芯片 CIS 相机系统,到 2013 年初,在平板电脑中发现了 8 MP ISX014 堆叠芯片。第一代芯片通过最后一个 TSV 用于连接索尼制造的 90纳米 CIS 芯片连接到索尼制造的 65 纳米代 ISP 上的着陆焊盘(来源:Chipworks)。索尼的 13 MP IMX214 第二代堆叠式 CIS 芯片采用类似的 90/65 nm (CIS/ISP) 技术制造,并在 2014 年被包含在 iPhone6/6s 中。最近(2017 年 2 月)索尼宣布推出 3 层 CIS 设备包括顶层 BSI 传感器或 CIS 光电二极管、中间层 DRAM 单元阵列和底层逻辑作为 ISP(图 8)。这是一款 23MP 图像传感器,像素尺寸为 1um x 1um,采用新的混合键合结构(而传统结构类似于 TSV)。索尼还于 2017 年 5 月发布了其首款采用三明治堆叠 DRAM 的三层 960 fps 相机。
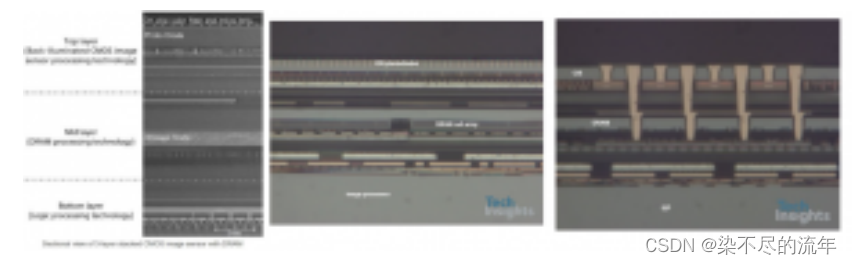 图 8:索尼 3 叠层 CIS 设备(来源:ISSCC 2017 & TechInsights)
图 8:索尼 3 叠层 CIS 设备(来源:ISSCC 2017 & TechInsights)
3D 堆叠 CIS 历史
在表 2 中,我们总结了 3D 堆叠 CIS 的历史(来源:www.3DIC.org)。可以清楚地看到,技术从氧化物键合+通过最后的 TSV 堆叠技术转变为混合键合,最近又发展为顺序 3D 集成。国家纳米器件实验室和台湾国立清华大学的研究人员最近展示了一种单片 3D 图像传感器。他们依次制造了单层 (<1nm) TMD(过渡金属二硫属化物)光电晶体管阵列,使用 CVD 生长的 MoS 2 转移到具有高密度互连的 3D 逻辑/存储器混合 3D IC 的顶部。
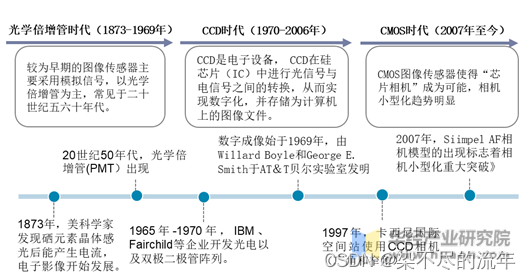
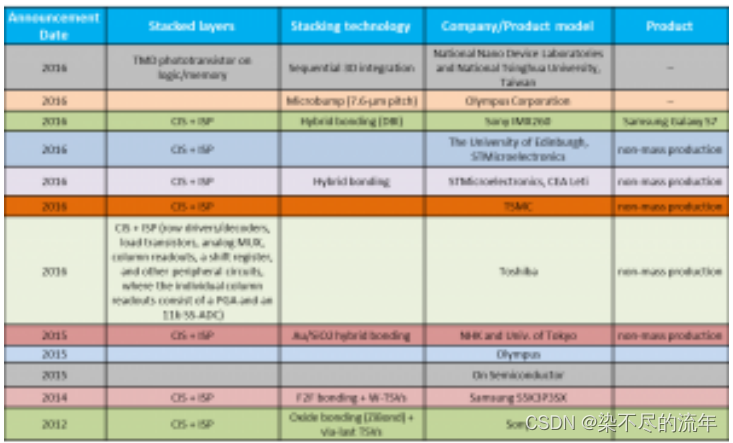
表2:堆叠的 CIS 历史(来自 www.3DIC.org)
CIS 技术/市场/今天和明天的参与者
未来 CIS 技术采用的路线图受到三个限制或驱动因素的推动:
- 尺寸(相机模块的 3 个维度,X、Y 和 Z)
- 图像质量(分辨率、弱光性能、对焦 (AF) 和稳定性 (OIS))
- 功能(慢动作视频、图像分析、运动控制)
BSI、3D Stacked BSI、3D Hybrid 以及 3D Sequential Integration 都是影响未来 CIS 技术采用的关键技术。
多年来,独联体市场的竞争格局发生了巨大变化。索尼是市场、生产和技术的领导者。Omnivision 和三星保持强势,Galaxycore 和 Pixelplus 等新玩家不断涌现。与此同时,集成设备制造 (IDM) 模式一直是佳能和尼康的重要力量来源,这两家公司都经受住了数码相机市场放缓的考验。至于松下,它已经与 Tower Jazz 成立了一家合资企业,以帮助其在高端成像应用中寻求销量。
今天,CIS 行业由移动和汽车应用驱动。智能手机相机的创新将继续,尽管这一大批量应用的竞争非常激烈。CIS 制造商被迫将越来越多的功能集成到移动摄像头中(参见图 9),以保持竞争力。


















 1254
1254

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











