







DS3218伺服脱机参数

驱动方式
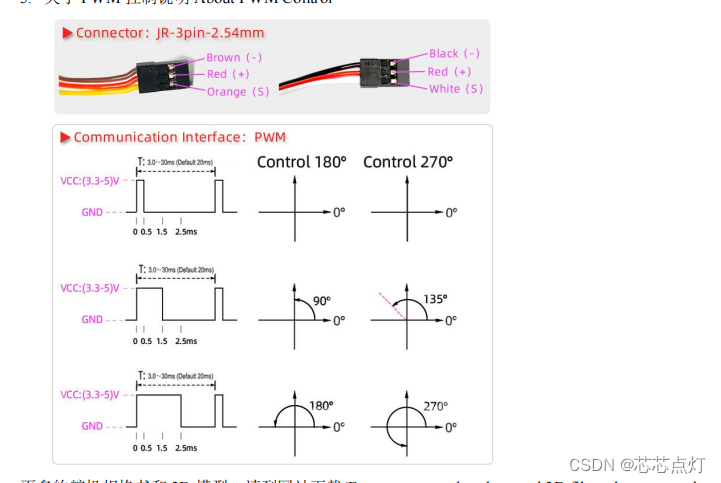
可以看到,和普通的SG90舵机驱动是差不多,直接上代码;
初始化代码,高级定时器8,通道1,引脚PC6,使用高级定时器的重复计数功能实现脉冲个数。
#include "pwm.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim8;
uint8_t htim8_pwm_num=0;
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle);
/* TIM8 init function */
void MX_TIM8_Init(uint16_t psc ,uint16_t arr)
{
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
htim8.Instance = TIM8;
htim8.Init.Prescaler = psc -1 ;
htim8.In 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5554
5554

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









