







一、宋浩然博士Prime分享
分享链接:自动驾驶中的车辆轨迹预测
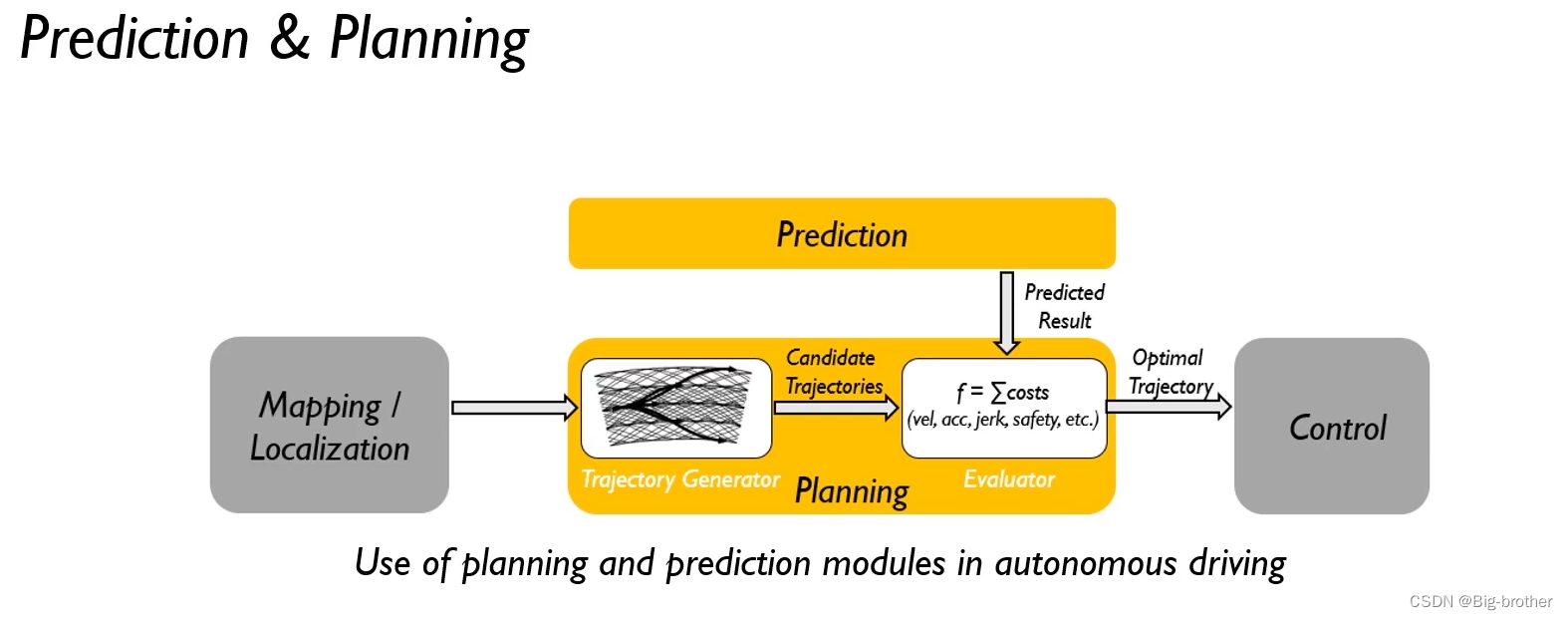
1、预测在自动驾驶中的作用
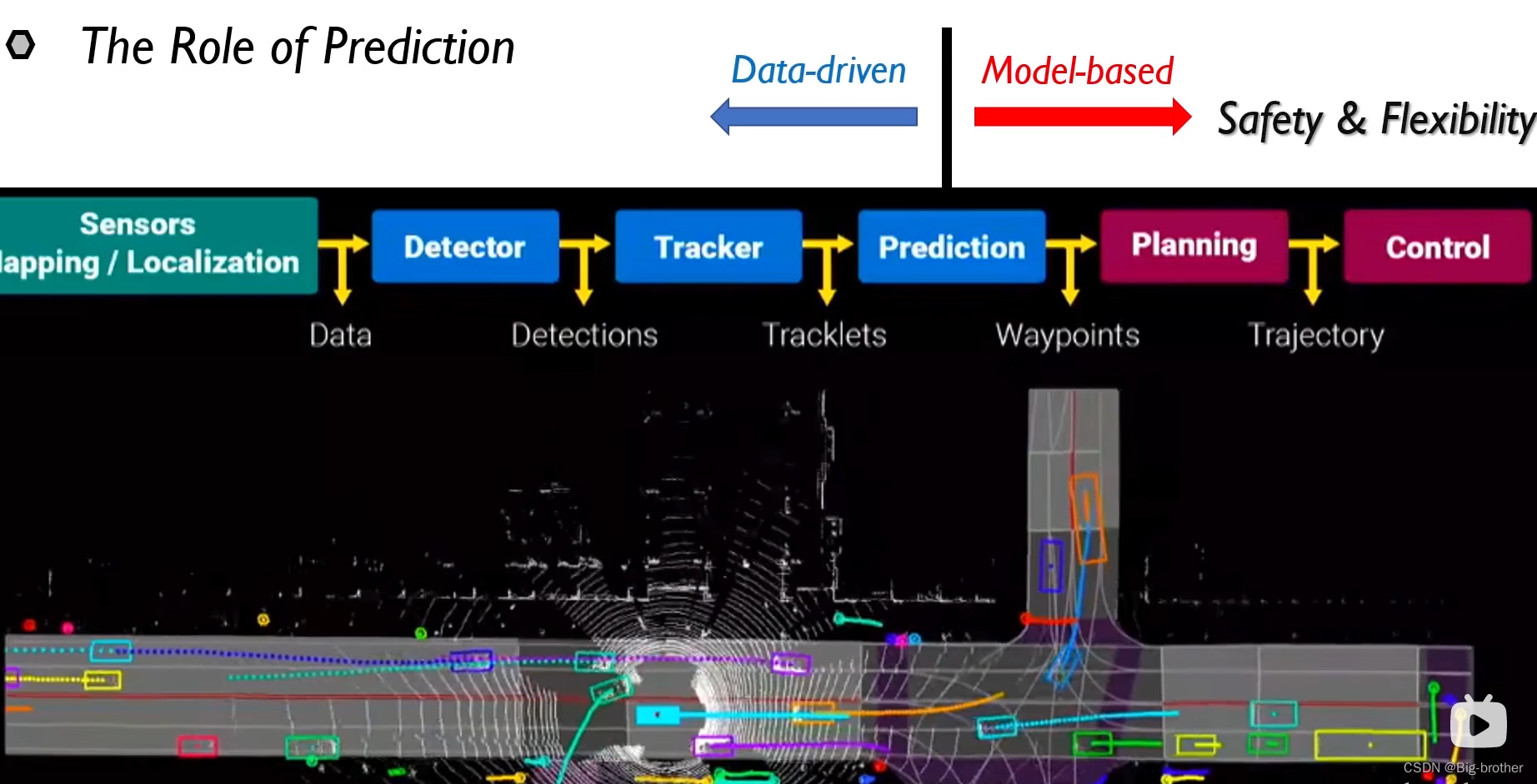
预测模块在自动驾驶中起到一个承上启下的作用,上游感知模块一般采用数据驱动的方法来进行单帧目标的融合感知以及多帧的目标跟踪,下游规控模块一般采用基于模型的方法(规则,运动模型)。如果没有预测模块,规控就相对来说比较保守,来保证安全性,引入预测模块预测目标的未来轨迹,既保证了自车规控的安全性,也保证了灵活性。
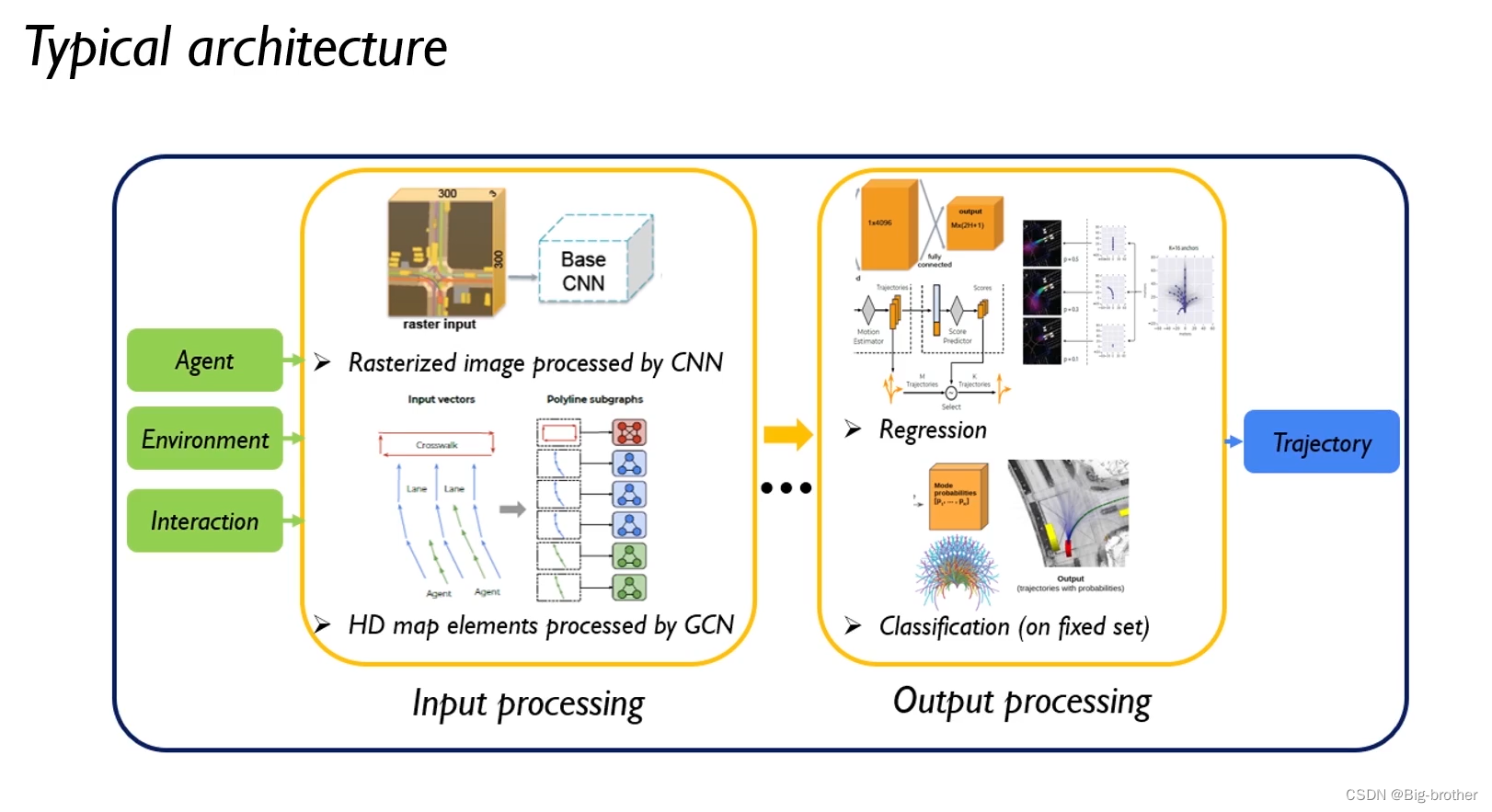
2、预测模块的输入表征
预测模块数据表征主要是对三种对象进行表征:
- 道路参与者,包括自车和他车;
- 道路环境信息,比如车道线,红绿灯等;
- 自车与他车的交互;
(1)基于图像表示的方式(栅格图)
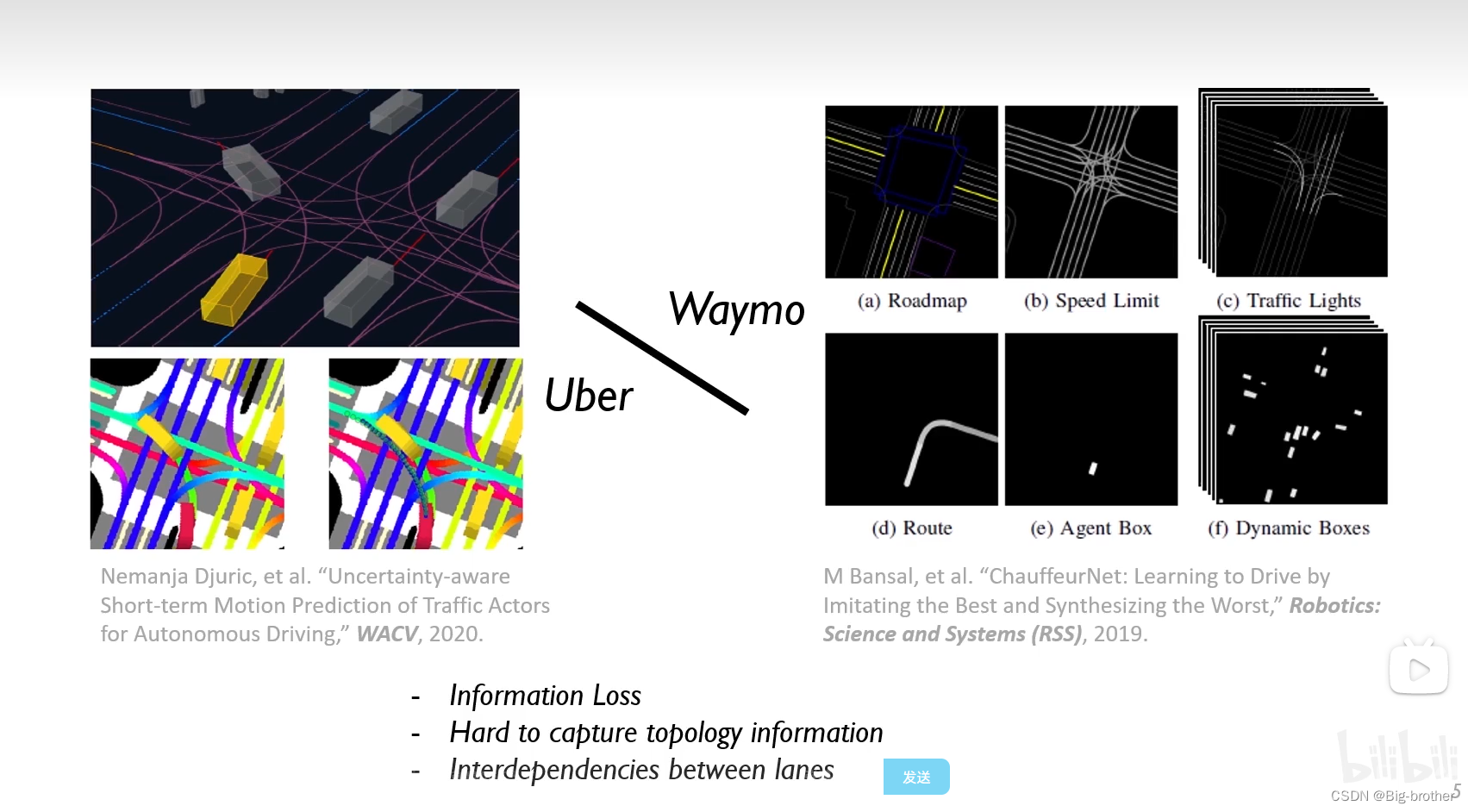
将所有的信息(自车、他车、交通环境等)转化成栅格图。这种方式存在一定的缺点:
- 会有一定的信息丢失,比如有些车道线会有重合;
- CNN比较难以学到道路之间的拓扑关系;
- 也比较难以表征车道之间的依赖关系;
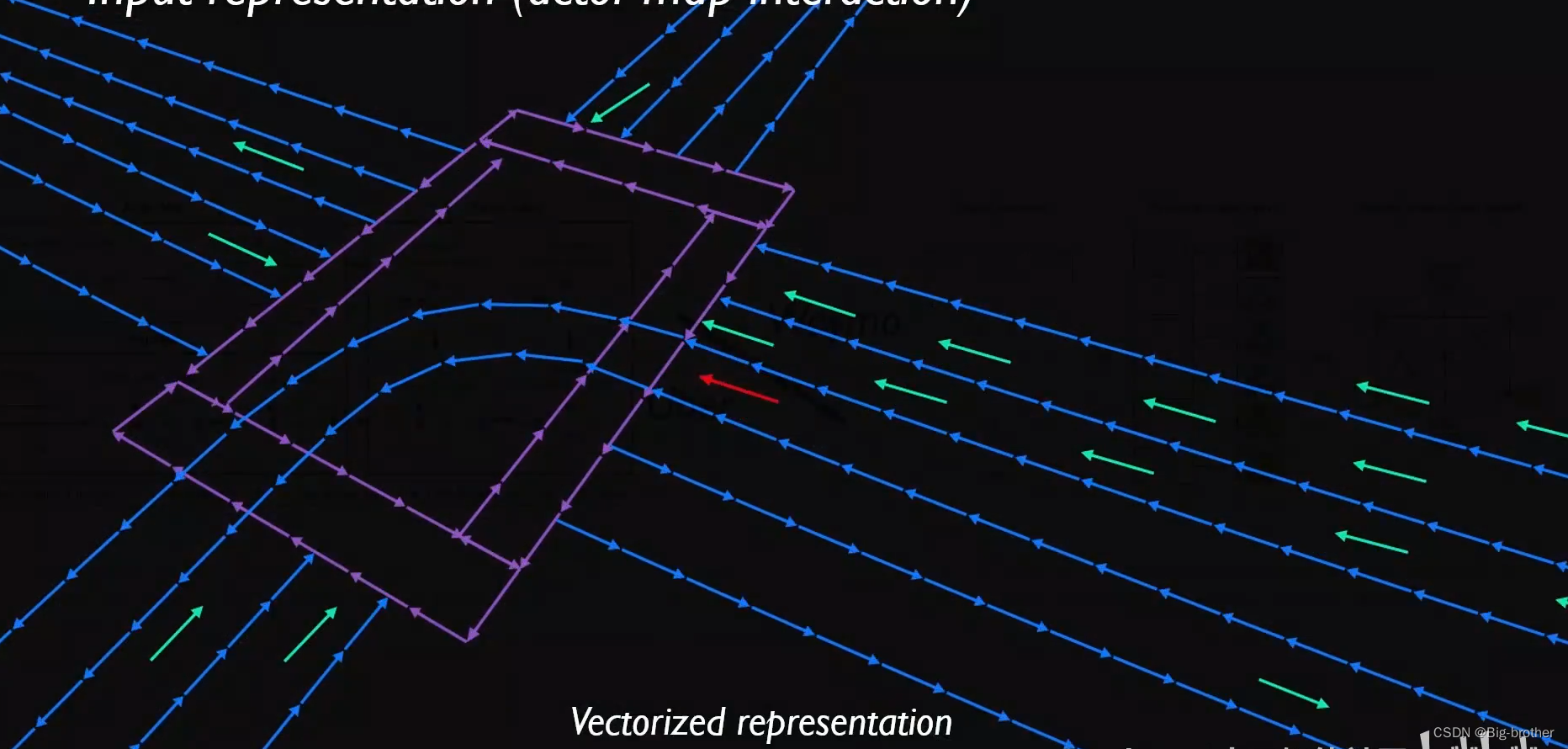
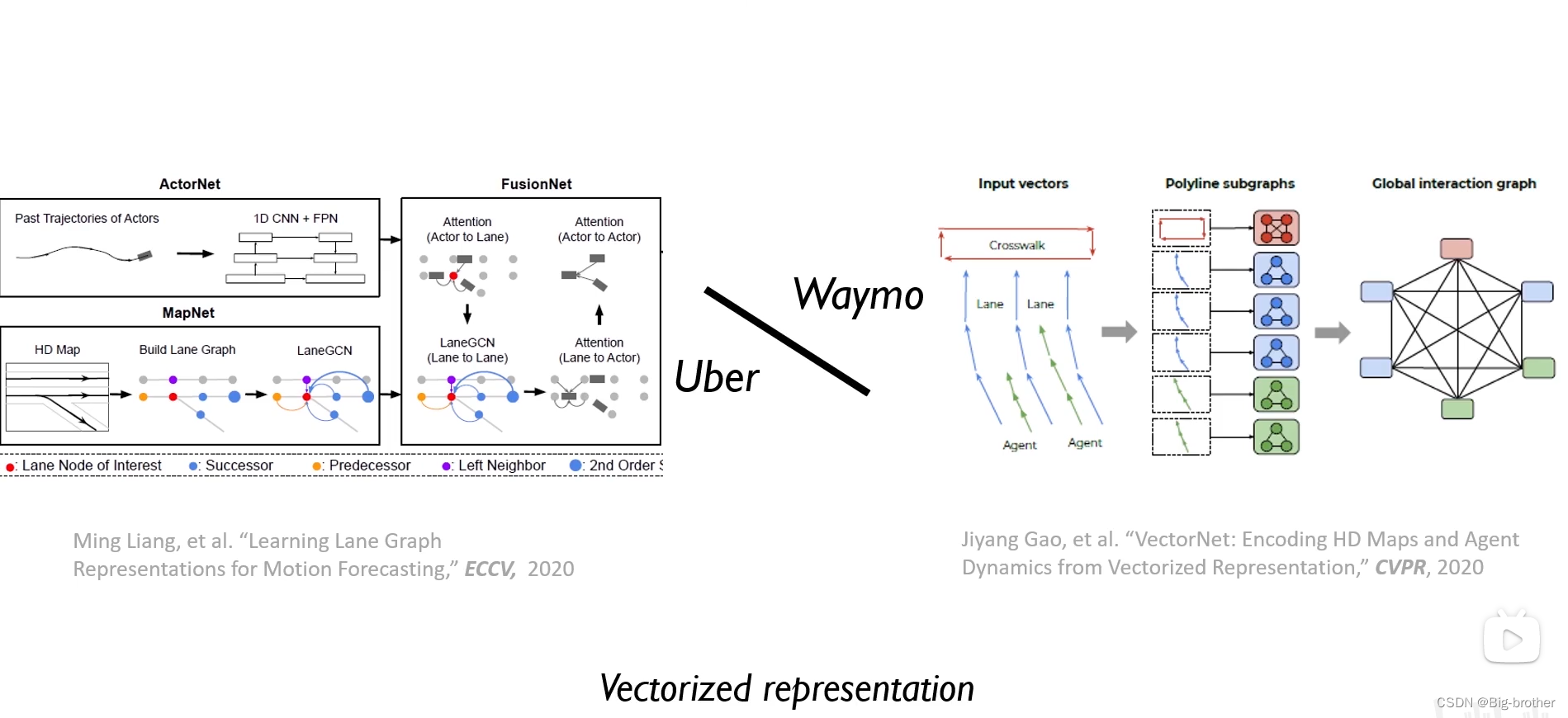
(2)基于向量的表征方式
由于图像表征方式存在的缺陷,所以基于向量的表征应运而生。
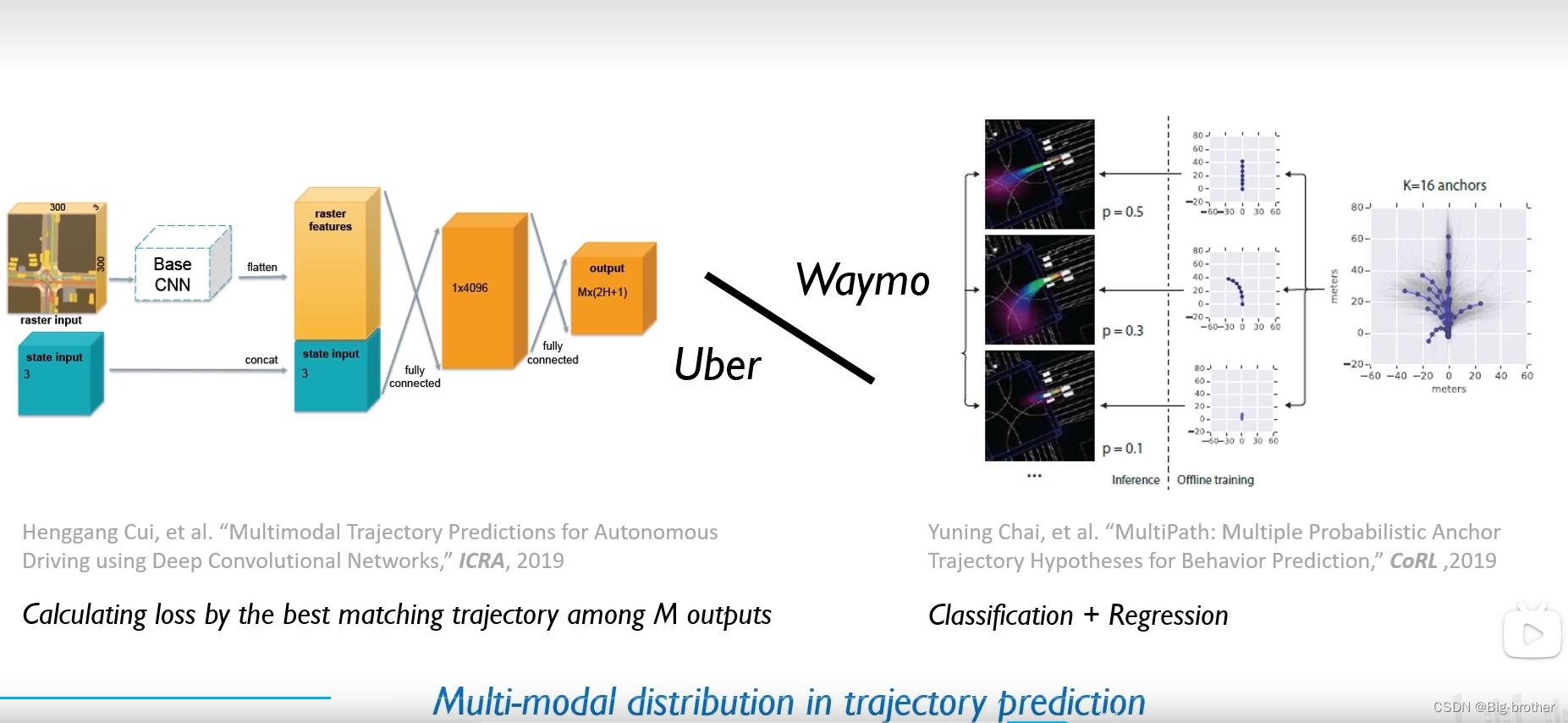
3、预测模块的输出表征
输出表征决定了轨迹是如何生成的。

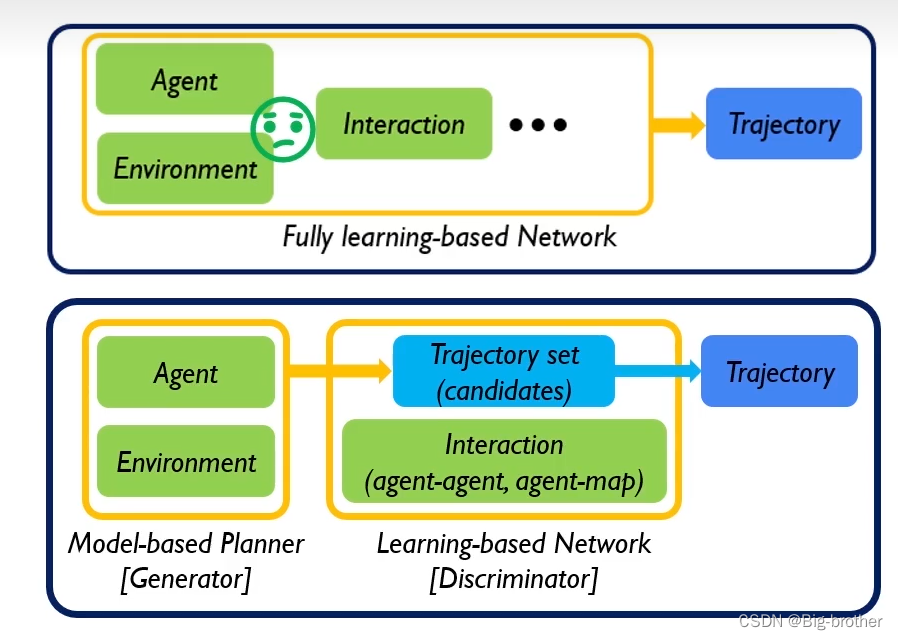
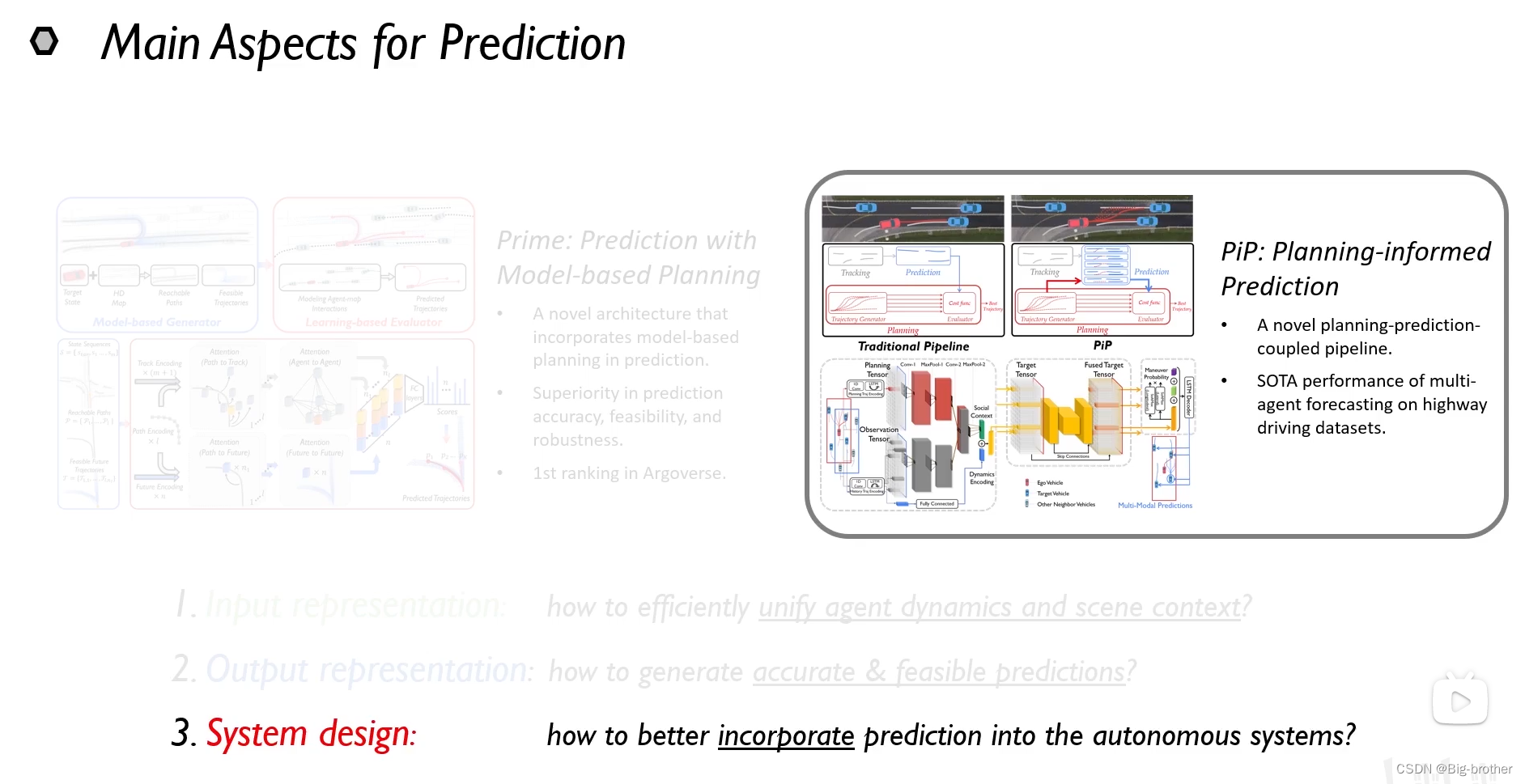
4、预测模块的系统设计
一个预测系统应该具备以下几点特点:
- 对历史轨迹比较短的目标也能有一个比较好的预测结果;
- 输出的结果对Planning来说比较友好,比如不会输出明显违反运动学规律的轨迹;
- 能够比较好的处理数据不平衡的问题,比如U型轨迹比较少;
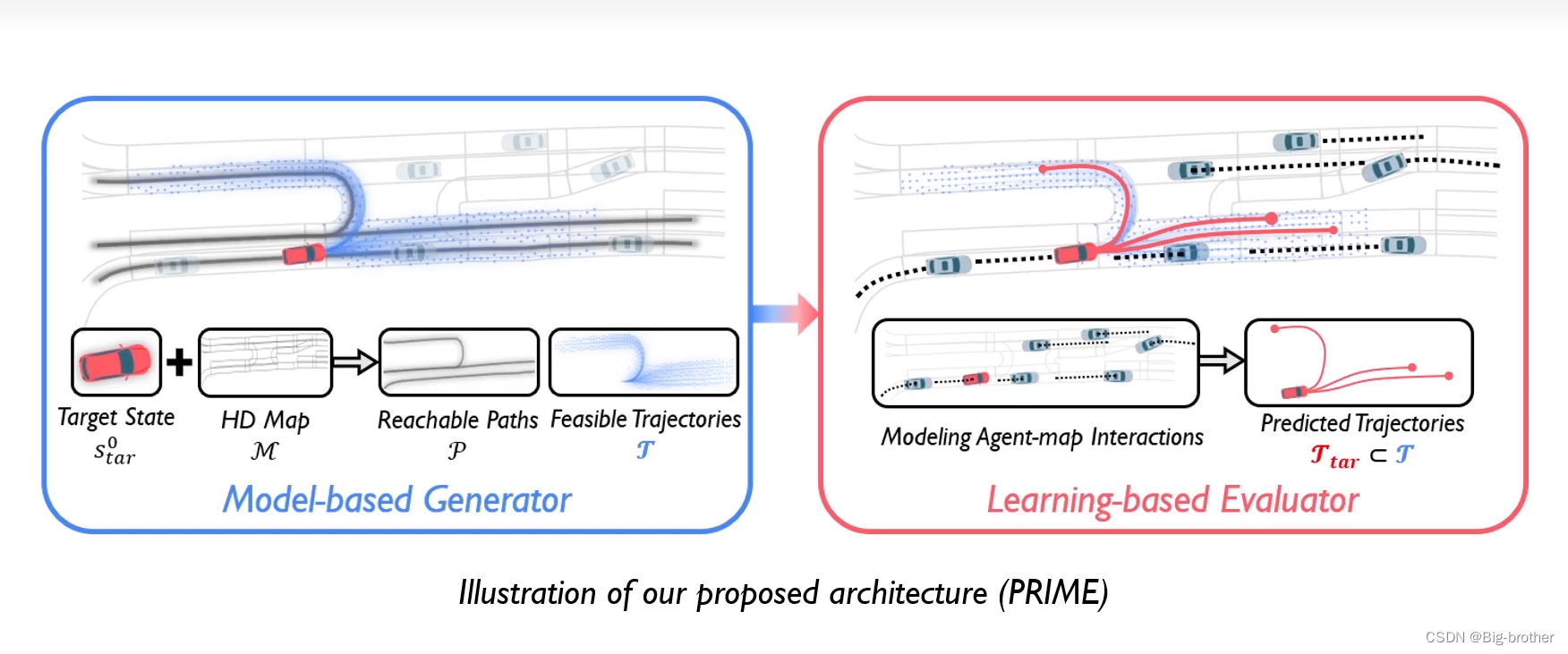
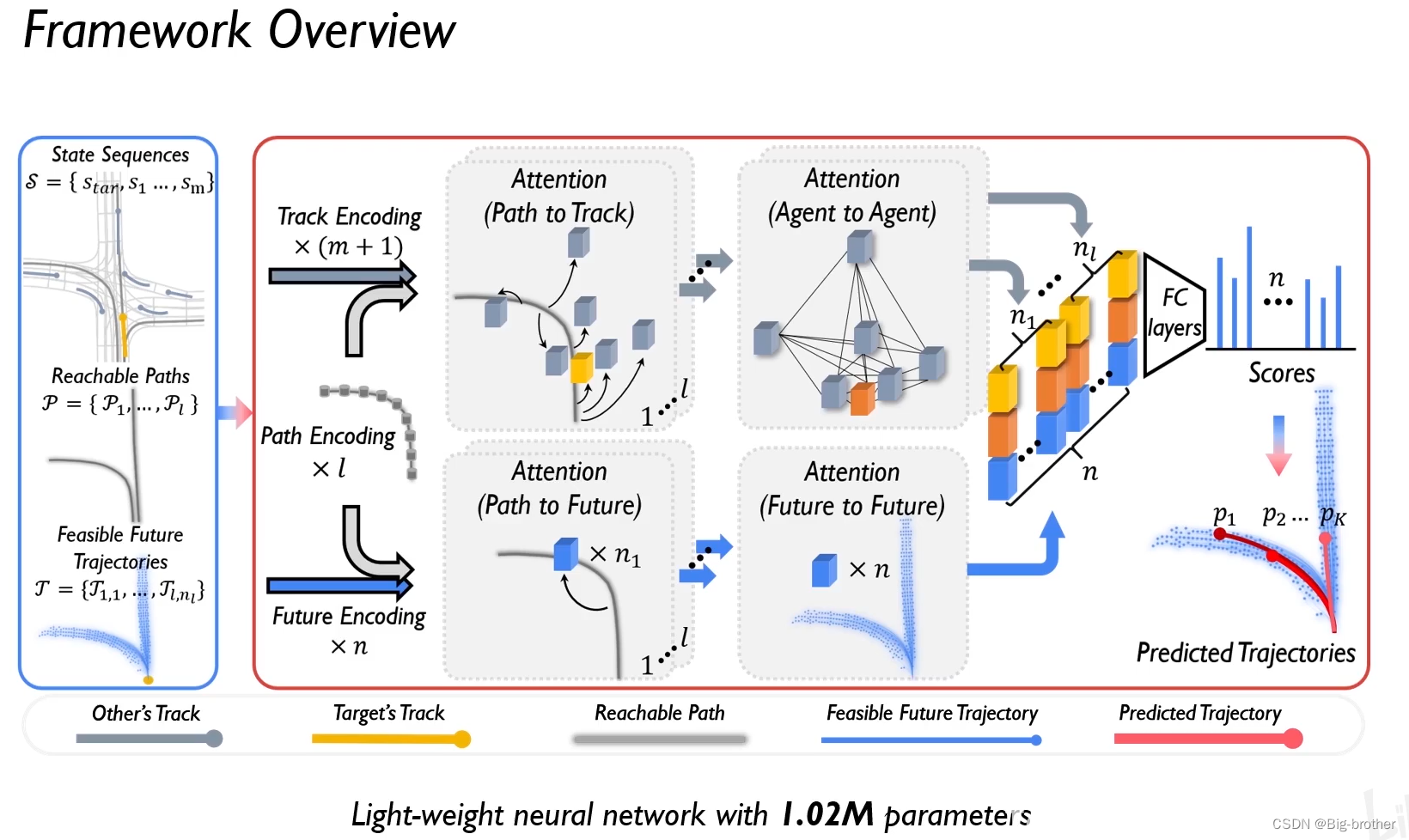
(1)PRIME工作介绍
PRIME工作的核心思想是通过基于模型的方法生成预测轨迹候选集,减少后续轨迹搜索空间。
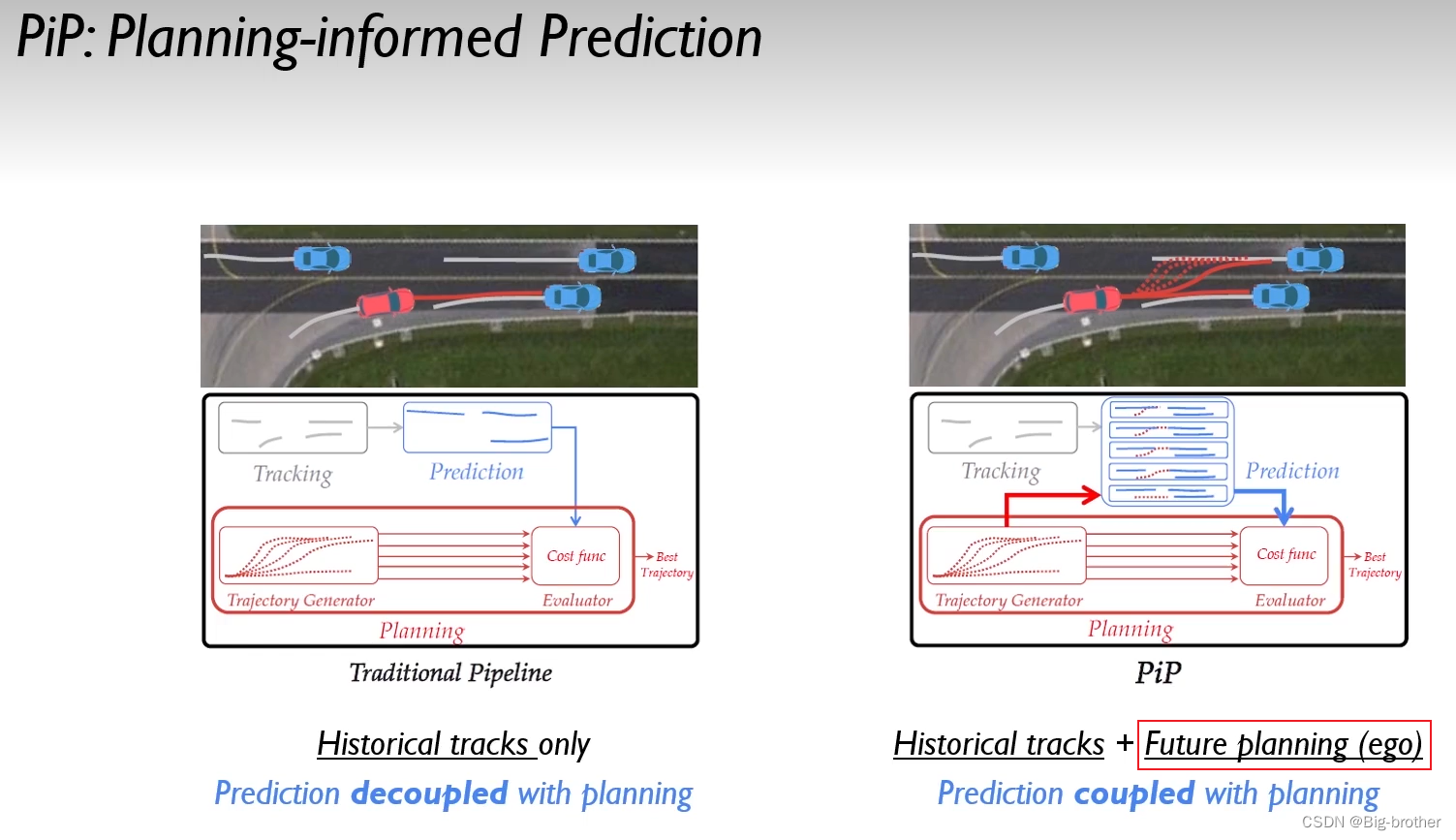
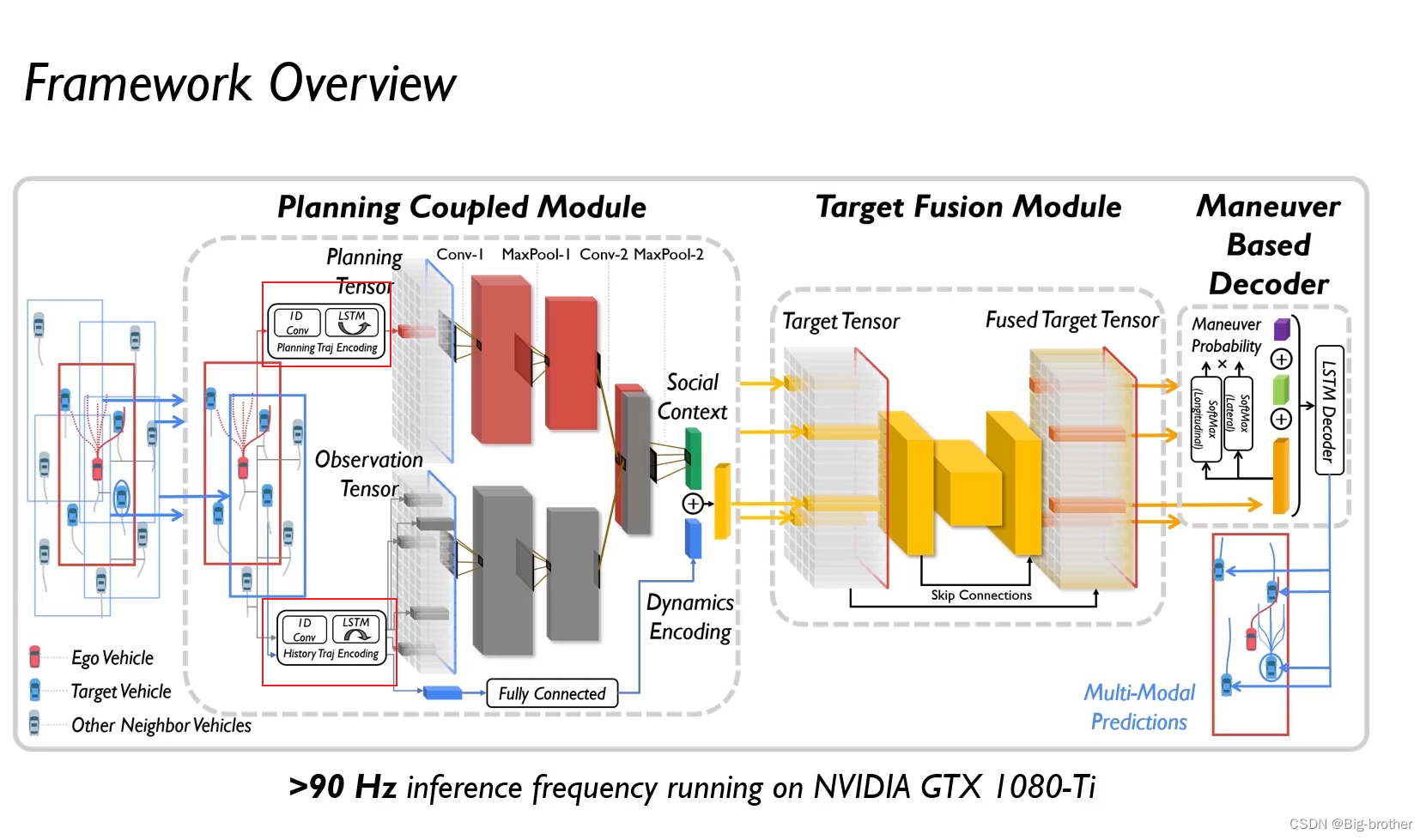
(2)PIP工作介绍
PIP的核心思想是将Planning输出的自车规划的轨迹传递给预测模块,以更好的来进行目标车辆未来轨迹预测。
传统的Planning与Prediction之间的关系:预测模块只预测目标车轨迹,然后将轨迹传递给Planning帮助其更好的对自车候选轨迹进行打分。
5、参考资料














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









