






 文章讨论了液位控制系统的动态模型,包括微分方程建立、传递函数设计,以及针对扰动的时域性能分析。涉及根轨迹校正方法,针对稳定与不稳定系统的设计与校正,并利用MATLAB进行仿真和先进控制算法的应用研究。
文章讨论了液位控制系统的动态模型,包括微分方程建立、传递函数设计,以及针对扰动的时域性能分析。涉及根轨迹校正方法,针对稳定与不稳定系统的设计与校正,并利用MATLAB进行仿真和先进控制算法的应用研究。
原题目
下图所示为液位控制系统,假设稳态输入流量为Q![]() ,稳态输出流量为Q
,稳态输出流量为Q![]() ,稳态水头为H
,稳态水头为H![]() ,稳态导阀的位移为X=0
,稳态导阀的位移为X=0![]() ,稳态阀的位置为Y
,稳态阀的位置为Y![]() 。假设定点R
。假设定点R![]() 对应于稳态水头H
对应于稳态水头H![]() ,设定点是固定的。又假设扰动输入流量qd
,设定点是固定的。又假设扰动输入流量qd![]() 在t=0时刻作用于水箱,qd
在t=0时刻作用于水箱,qd![]() 的量值很小。
的量值很小。
要求:
- 分析系统工作过程,建立系统的传递函数,并画出结构图;
- 当扰动输入量qd
 为单位阶跃函数时,试分析系统的时域性能;
为单位阶跃函数时,试分析系统的时域性能; - 当系统不稳定时,用根轨迹校正系统并确定系统校正装置参数,画出系统波特图,指出校正方法;如果系统是稳定的,那么就设计一个不稳定系统,用根轨迹进行分析并确定系统校正装置参数,画出系统波特图,指出校正方法;
- 设计、校正结果验证;
- 运用MATLAB仿真控制系统,附程序代码;
- 查阅相关文献,探讨先进控制算法在该系统中的应用。
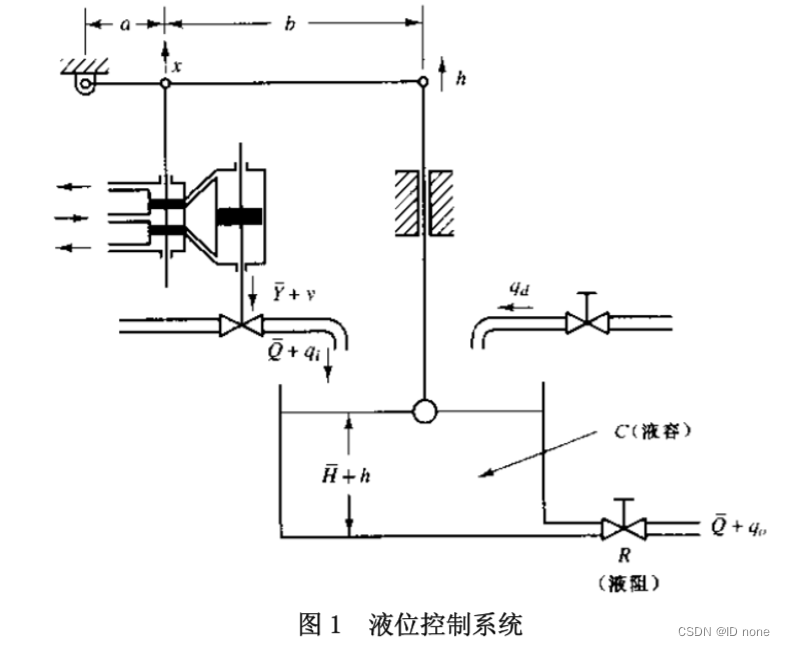
下图所示为液位控制系统,假设稳态输入流量为Qi,稳态输出流量为Qo,稳态水位为H,稳态导阀的位移为X=0,稳态阀的位置为Y。假设定点R对应于稳态水头H,设定点是固定的。又假设扰动输入流量qd在t=0时刻作用于水箱,qd的量值很小。
分析系统工作过程
水流入量Qi(Quatity in)
水流出量Qo
稳态水位 高度H。反映了水的流入流出之间的平衡关系。显然,当流入量多于流出量时,h增加,浮球上升,通过连杆调节调节阀Y,以减少出水量使液位稳定;反之亦然
调节阀位置Y,同时用Y代指调节阀本身
Q为输入输出水流量稳态值
qd为扰动输入流量
h为液位增量
v为稳态阀增量
R为液阻
C为液容
当Qi不等于Qo时。例如H+h增加时,浮子升高,使稳压阀减小阀门开度,进入时间的流量减少;反之,当H+h减小时,系统会增大稳压阀的阀门开度,加大流入水量,使液位升到给定高度。
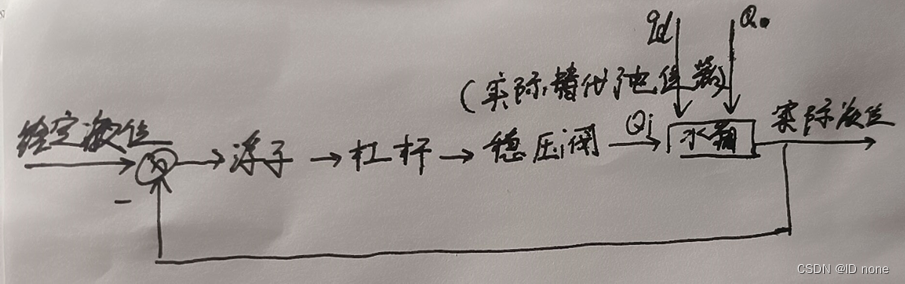
系统方块图
符号含义
Qi:水流入量
Qo:水流出量
R:液阻
C:液容
H:稳态水位
Y:调节阀位置
+h:液位增量
+v:稳态阀增量
-v:稳态阀减量
qd:扰动流入量
杠杆和稳压阀中间还需要一个导阀
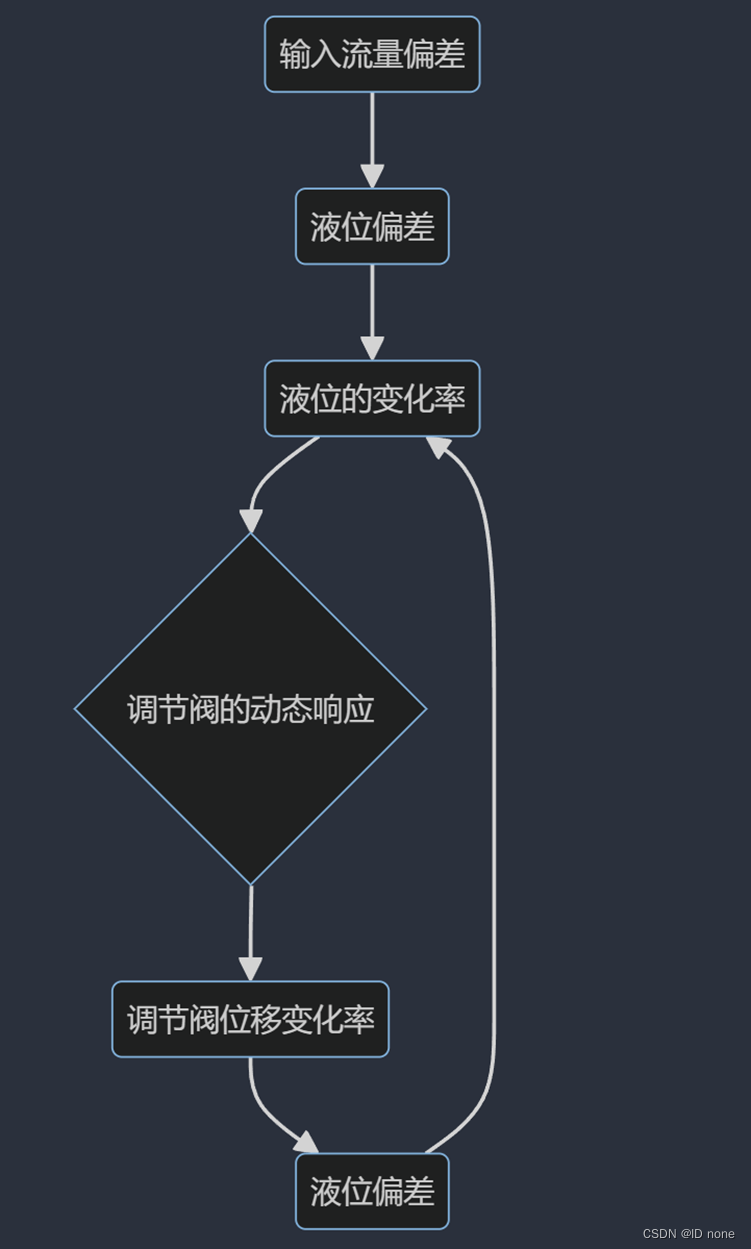
微分方程建立
首先,定义输入和输出的偏差:
\[\Delta Q = Q - Q_o\] (输入流量偏差)
\[\Delta H = H - R\] (液位偏差)
然后,我们可以根据系统的物理原理列出微分方程:
\[\frac{dH}{dt} = \frac{1}{C} \cdot (\Delta Q - \Delta Q_d)\] (液位变化率)
其中,
- \(\frac{dH}{dt}\) 表示液位的变化率;
- \(C\) 表示液容;
- \(\Delta Q\) 表示输入流量偏差;
- \(\Delta Q_d\) 表示扰动输入流量偏差。
同时,我们还需要考虑调节阀的动态响应。假设调节阀的动态方程为:
\[\frac{dY}{dt} = k \cdot (\Delta H - X)\] (调节阀位移变化率)
其中,
- \(\frac{dY}{dt}\) 表示调节阀位移的变化率;
- \(k\) 表示调节阀的增益;
- \(\Delta H\) 表示液位偏差;
- \(X\) 表示稳态导阀的位移。
需要注意的是,根据假设,稳态时导阀的位移为 \(X = 0\),所以动态方程中的 \(\Delta H - X\) 简化为 \(\Delta H\)。
综上所述,浮球液位控制系统的微分方程为:
\[\frac{dH}{dt} = \frac{1}{C} \cdot (\Delta Q - \Delta Q_d)\]
\[\frac{dY}{dt} = k \cdot \Delta H\]
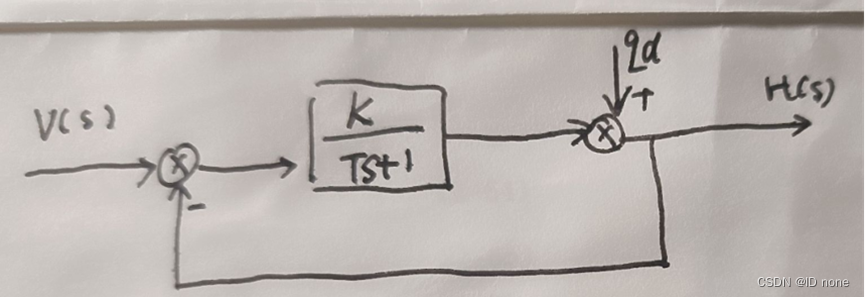
建立微分方程和传递函数
过程见word文档
当扰动输入量qd为单位阶跃函数时,试分析系统的时域性能;
当系统不稳定时,用根轨迹校正系统并确定系统校正装置参数,画出系统波特图,指出校正方法;如果系统是稳定的,那么就设计一个不稳定系统,用根轨迹进行分析并确定系统校正装置参数,画出系统波特图,指出校正方法;设计、校正结果验证;
运用MATLAB仿真控制系统,附程序代码;
查阅相关文献,探讨先进控制算法在该系统中的应用
参考文献
[1]边娟鸽,田卫明.水箱温度液位控制系统设计与实现[J].大众科技,2018,20(09):5-8.
[1]武晓磊.机械式浮球液位开关的相关研究[J].化工管理,2018(12):185-186.
[1]方庆琯. 开关阀流量特性实验中液阻和液容的设计研究[C]//中国机械工程学会.机床与液压学术研讨会论文集.《机床与液压》编辑部,2004:2.
[1]赵明广,方庆琯.液阻、液容对开关阀流量特性影响的仿真研究[J].工程机械,2007(03):41-44+87-88.

















 4414
4414

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









