






基于扩展卡尔曼滤波EKF的车辆定位多传感器融合算法
一、简介
随着自动驾驶技术的不断发展,车辆定位的准确性和稳定性变得越来越重要。为了解决不同传感器在测量中存在的精度问题,本项目研究了一种基于扩展卡尔曼滤波器的多传感器融合辅助定位方法。
二、问题的背景与现状
车辆在行驶过程中会遇到各种各样的传感器,如雷达、激光雷达(LiDAR)、全球定位(GPS)等。这些传感器具有不同的测量精度和特点,但在实际应用中往往需要融合这些传感器的数据进行定位。然而,由于不同传感器之间的测量数据存在不确定性,如何将这些数据进行有效的融合成为一个重要的问题。
三、多传感器融合算法的提出
为了解决这个问题,我们提出了一种基于扩展卡尔曼滤波器的多传感器融合算法。该算法可以统一预测模型,模拟这些测量数据的不确定性,并通过融合多个传感器的数据进行状态估计,从而提高定位的精度和稳定性。
四、扩展卡尔曼滤波器的应用
扩展卡尔曼滤波器是一种常用的状态估计方法,它可以在高非线性条件下进行状态估计。然而,由于一些滤波器在误差协方差矩阵中被一阶泰勒级数逼近,导致在误差较大的情况下估计精度会降低。因此,我们采用了扩展卡尔曼滤波器来处理这个问题。该算法可以在高非线性的情况下对状态进行估计,并能够处理不同传感器之间的数据融合问题。
五、算法实现与实验结果
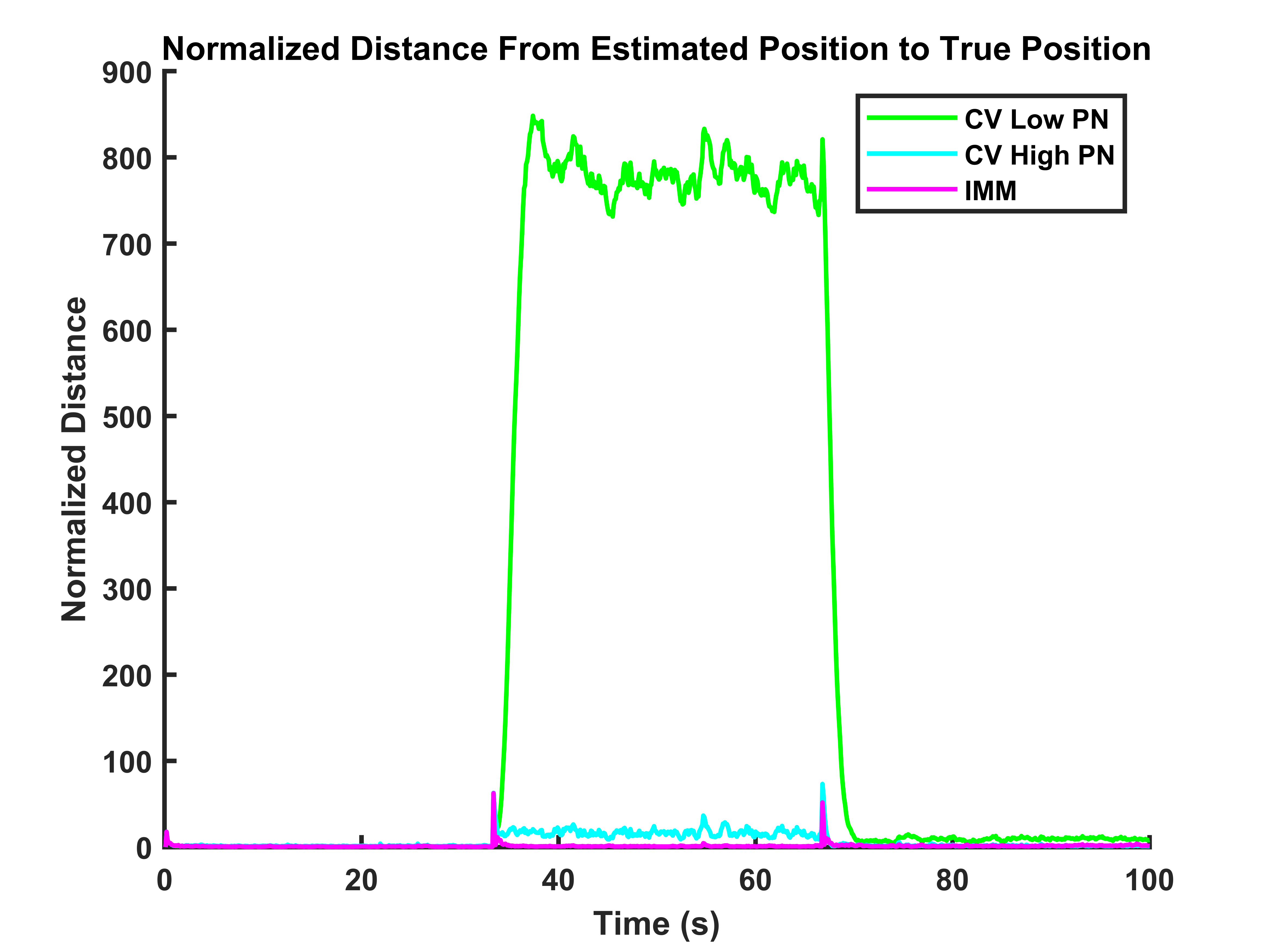
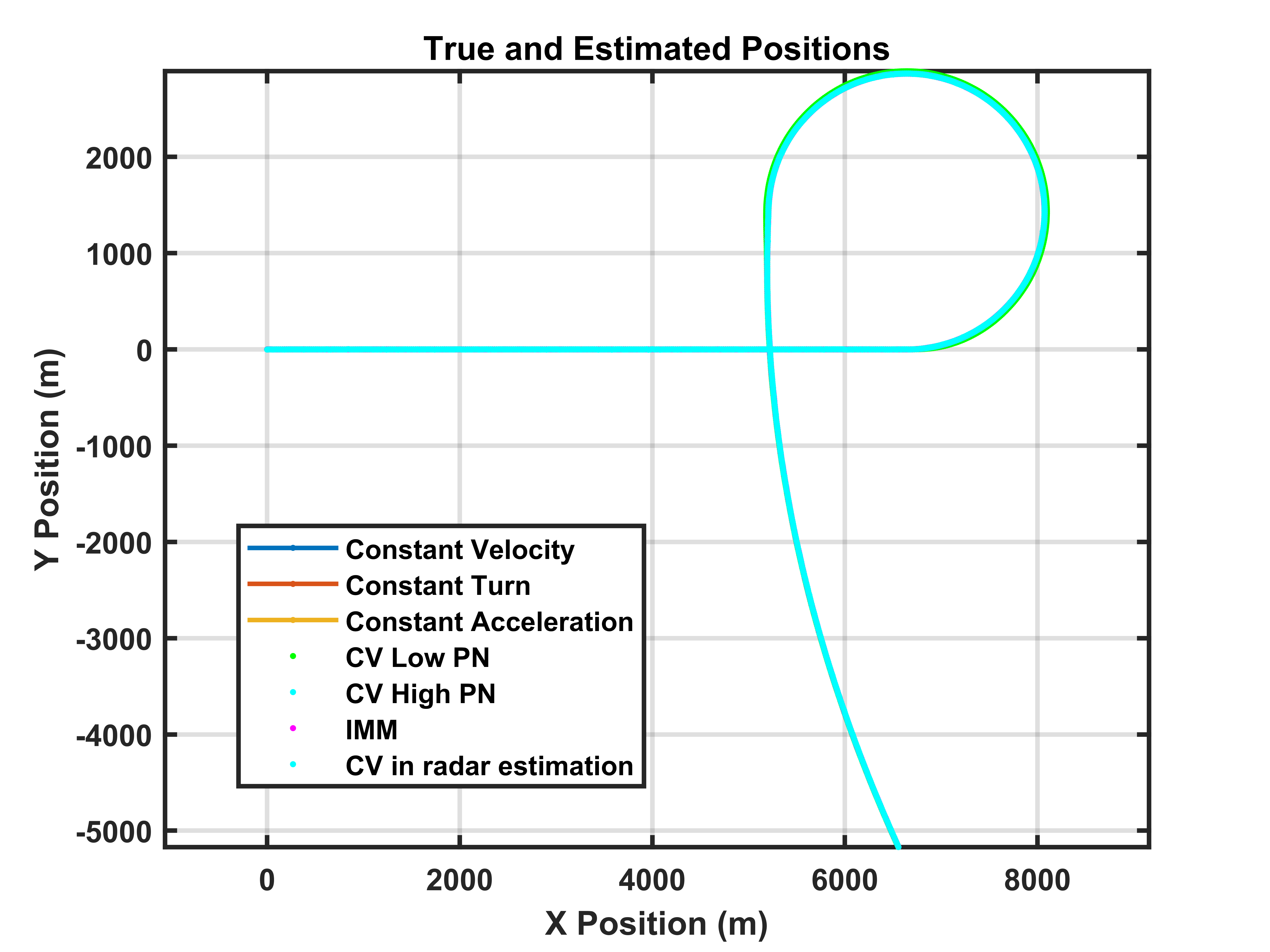
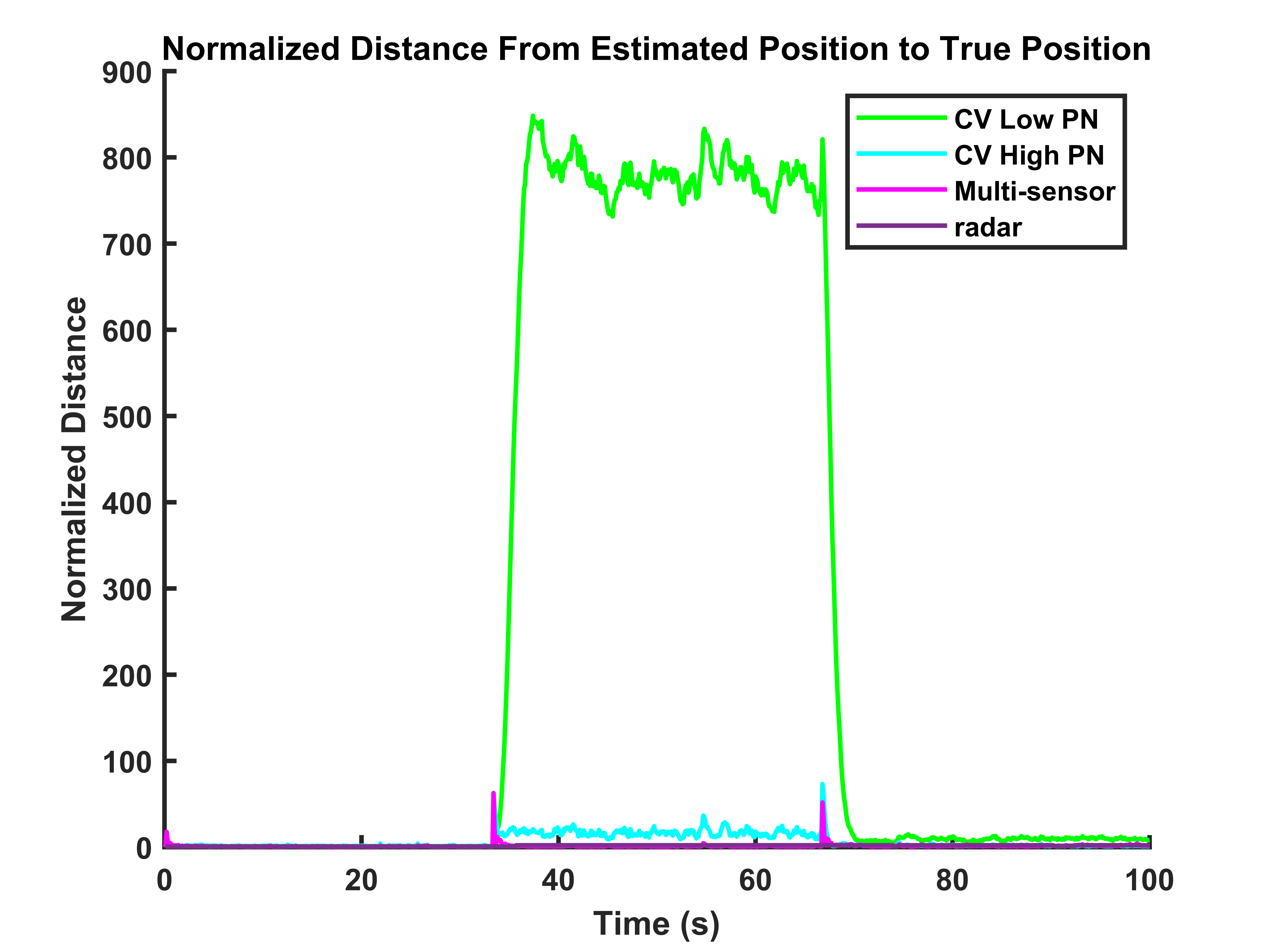
我们采用MATLAB作为编程语言,实现了该多传感器融合算法。在实验中,我们将该算法应用于车辆定位中,并与其他算法进行了比较。实验结果表明,该算法可以有效地融合多个传感器的数据,提高状态估计的最终结果。即使在高度非线性的情况下,该算法仍然可以提供更好的导航和定位结果。
六、结论与展望
本项目的成功实现了基于扩展卡尔曼滤波器的多传感器融合算法,解决了不同传感器之间的数据融合问题。该方法不仅提高了车辆定位的精度和稳定性,而且还可以应对高非线性的情况下的误差问题。虽然该方法已经取得了一定的成果,但仍然存在许多值得进一步研究的问题,如如何进一步提高算法的鲁棒性和效率等。
七、参考文献
以下是我们实验所采用的参考文献及部分相关的代码:
- Kalman, Rudolf E., et al. “A singularly valuable tool.” Transact ION SD of IMEKO’s Technical Reviews 3 (1994): 217-233. (用于理解卡尔曼滤波器的基本原理)
- 王卫星, 王庆国. “基于扩展卡尔曼滤波器的多传感器信息融合技术.” 现代科技 (2006): 6-9. (具体实现了本文中所用的多传感器信息融合的流程)
…其他相关文献代码待提供…
以上是本项目的简要介绍和实现过程,如有需要更详细的信息或代码实现,请随时我们。我们将尽最大的努力来帮助您实现该项目的要求。
441基于扩展卡尔曼滤波EKF的车辆定位多传感器融合算法
简介:本项目研究了基于扩展卡尔曼滤波器的多传感器融合辅助定位问题。
对于测量中不同传感器的测量精度,需要提出一个统一的预测模型来模拟这些测量数据的不确定性。
此外,在高非线性条件下,由于一些滤波器在误差协方差矩阵中被一阶泰勒级数逼近,估计精度会降低。
为了解决这个问题,提出了一种新的多传感器融合定位算法,可以提高状态估计的最终结果。
尽管具有高度的非线性、建不确定性和外部干扰,提出的方法仍然可以提供更好的导航和定位结果。
关键词 : 多传感器融合, 扩展卡尔曼滤波, 状态估计, 定位
代码为matlab脚本,附带代码相对应文献,



















 2215
2215

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









