



基于参数拟合法的线控转向路感模拟:Matlab 2017a及以上的应用
一、引言
在现代汽车控制中,线控转向技术是一种重要的发展方向。其中,路感模拟作为线控转向中的重要环节,其精确度和实时性对驾驶者的操控体验具有重大影响。参数拟合法作为一种有效的数学工具,能够用于模拟和预测路感变化,从而为线控转向的设计提供有力支持。本文将探讨基于参数拟合法的线控转向路感模拟方法,并使用Matlab 2017a及以上版本进行实践应用。
二、参数拟合法概述
参数拟合法是一种通过已知数据点来估计未知数据点的方法。在路感模拟中,我们可以将不同路况下的转向力矩、转向角度等数据作为已知参数,通过拟合算法来预测和模拟不同路况下的路感变化。这种方法具有较高的灵活性和准确性,能够适应不同路况和驾驶需求。
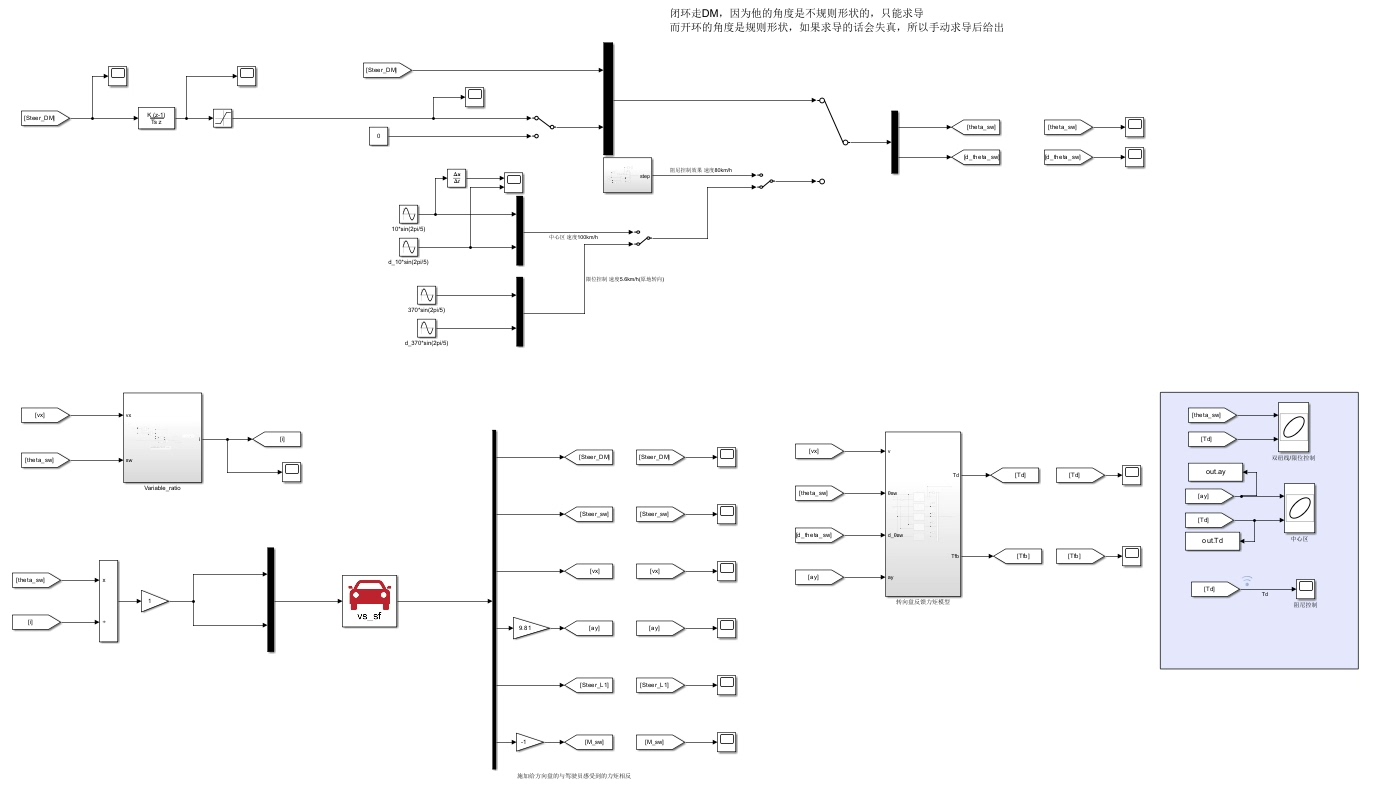
三、基于参数拟合法的线控转向路感模拟
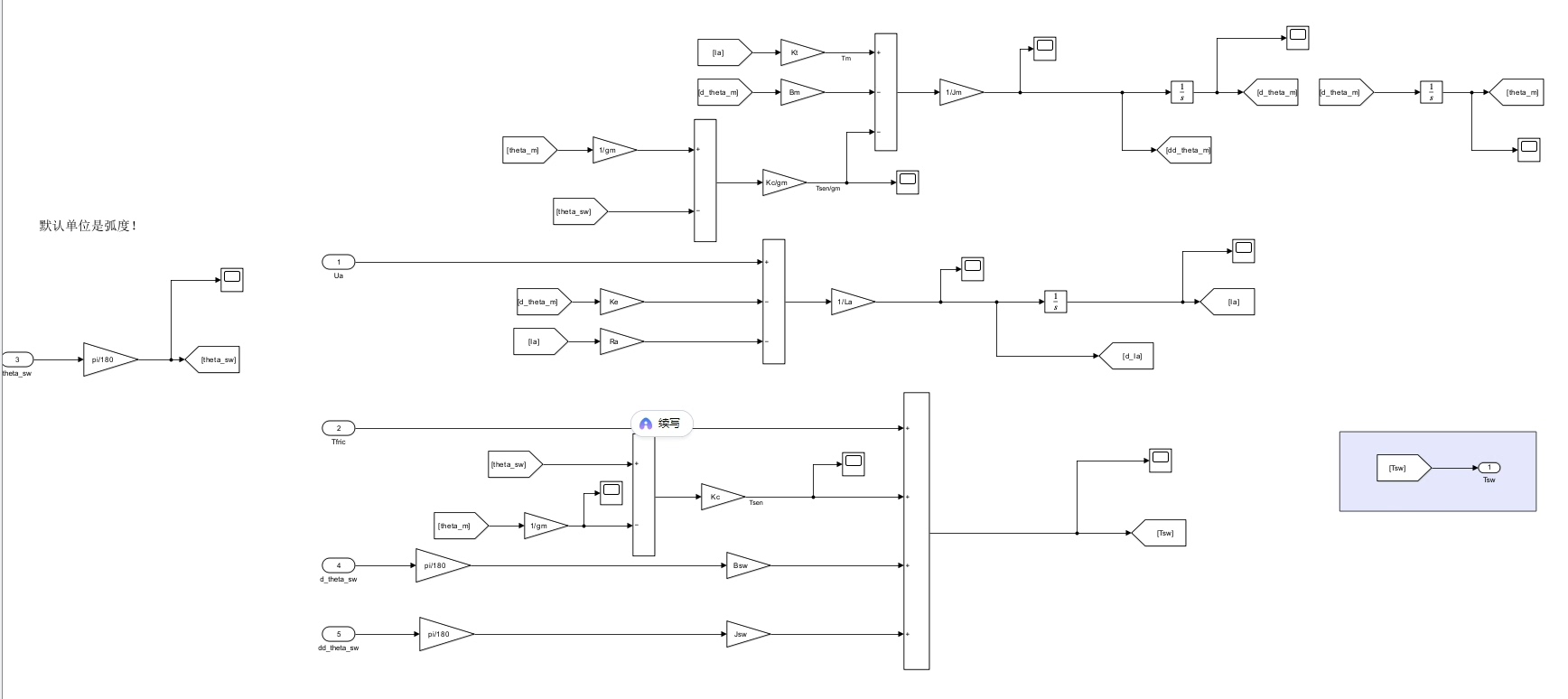
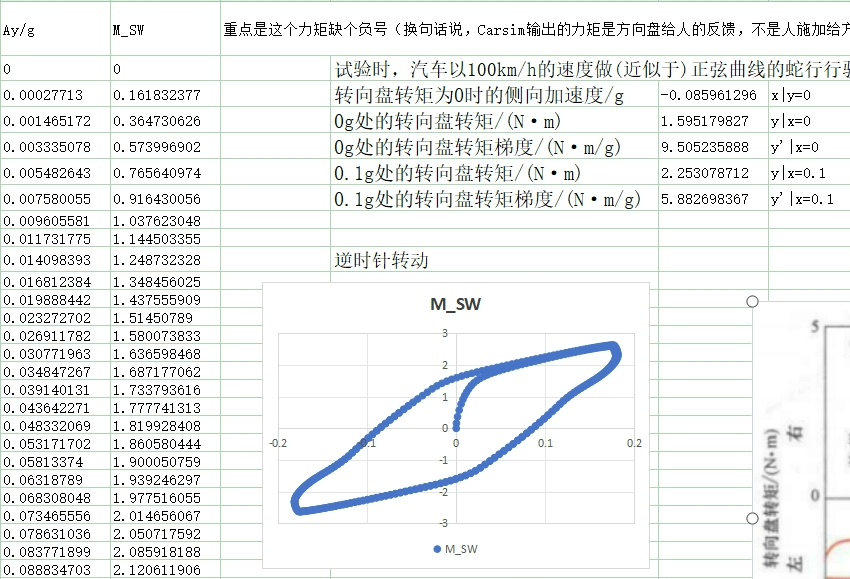
- 数据采集与预处理:首先,我们需要收集不同路况下的转向力矩、转向角度等数据。然后,对数据进行清洗和预处理,包括去除噪声、填补缺失值等。
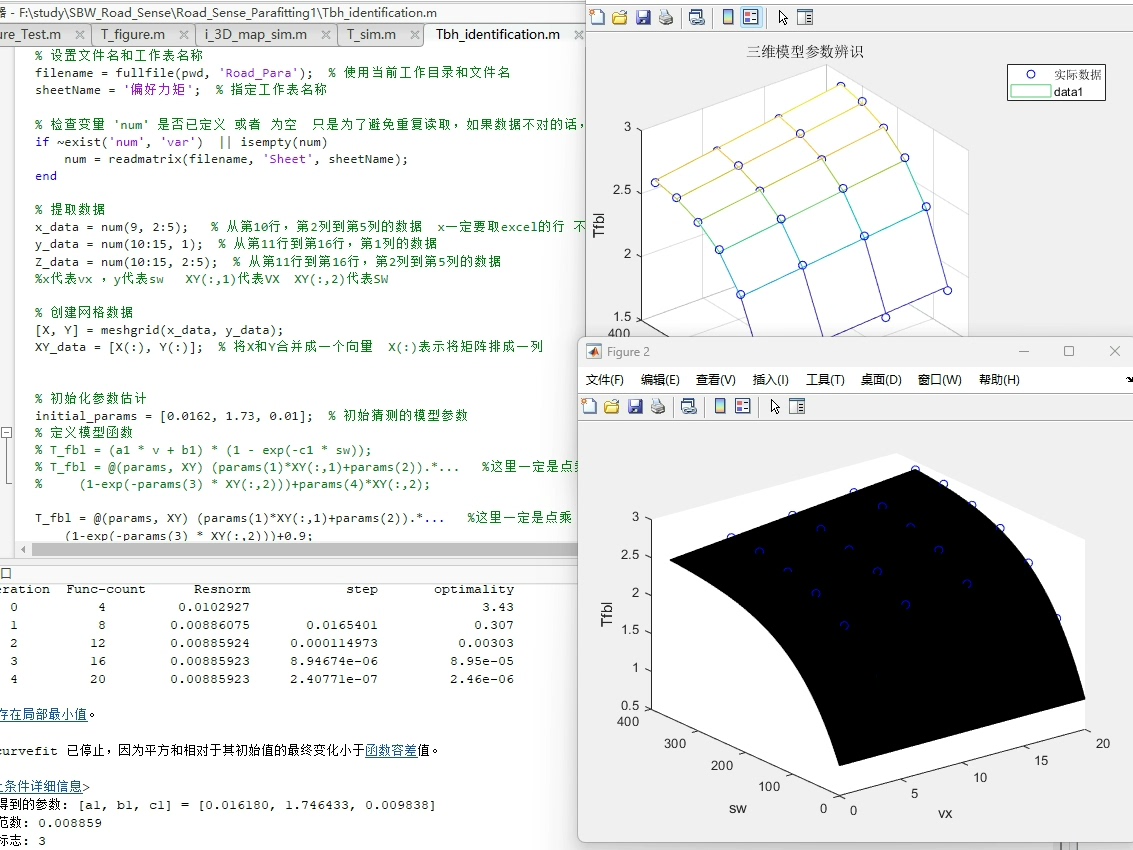
- 参数拟合:在数据预处理完成后,我们可以使用Matlab中的拟合工具进行参数拟合。根据实际需求,可以选择不同的拟合算法和模型,如多项式拟合、指数拟合等。
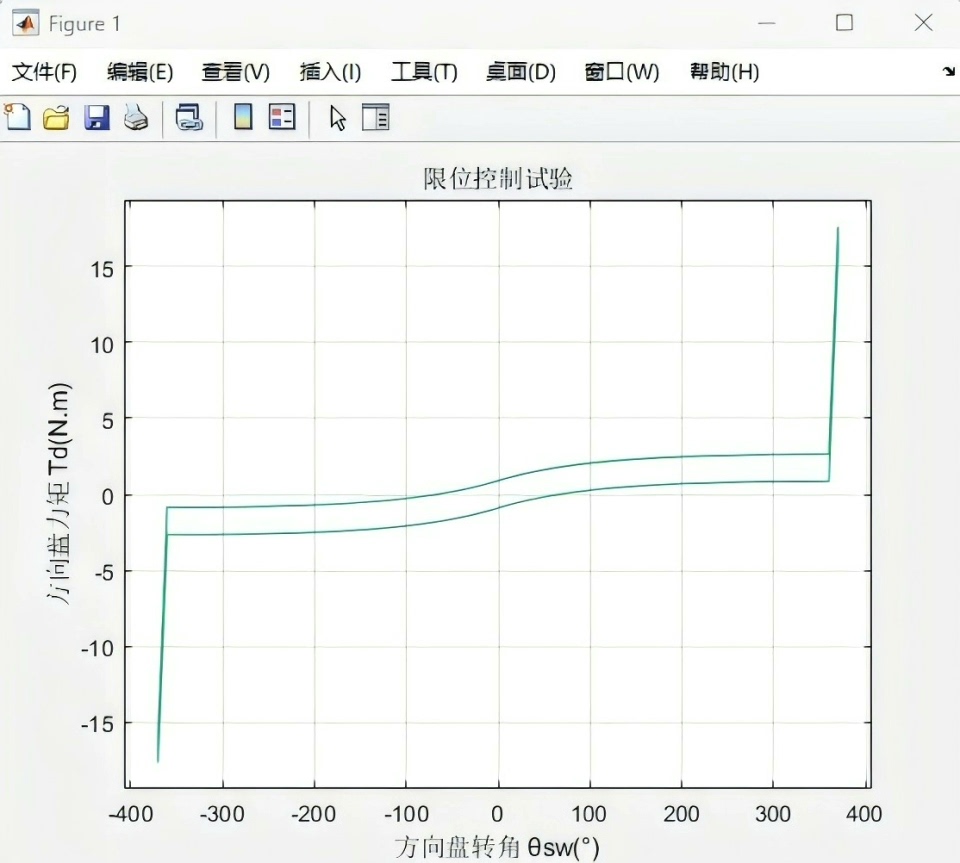
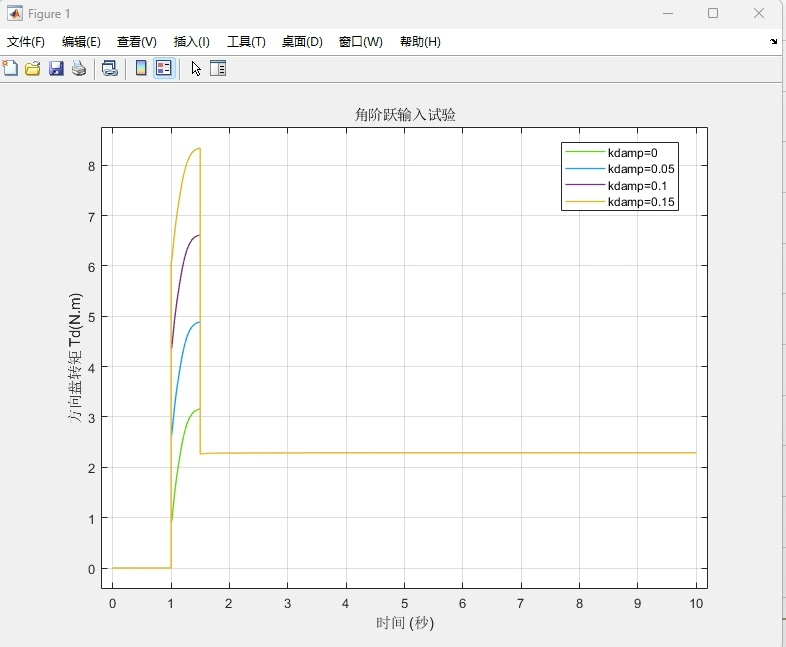
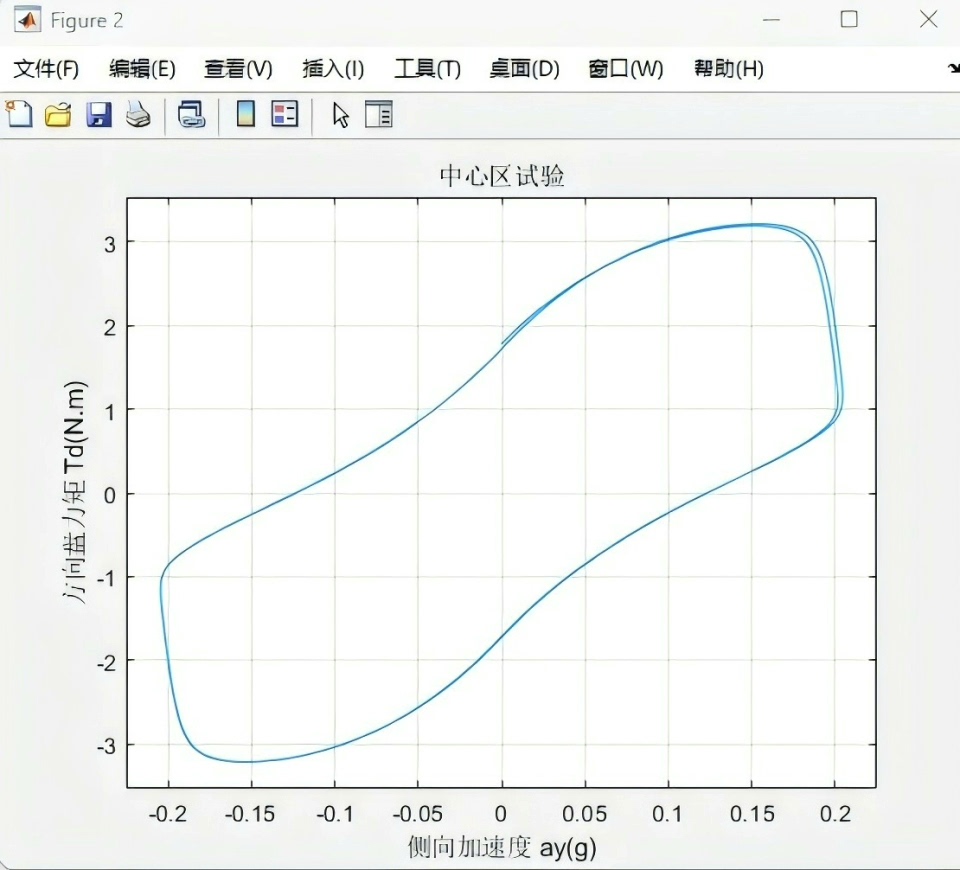
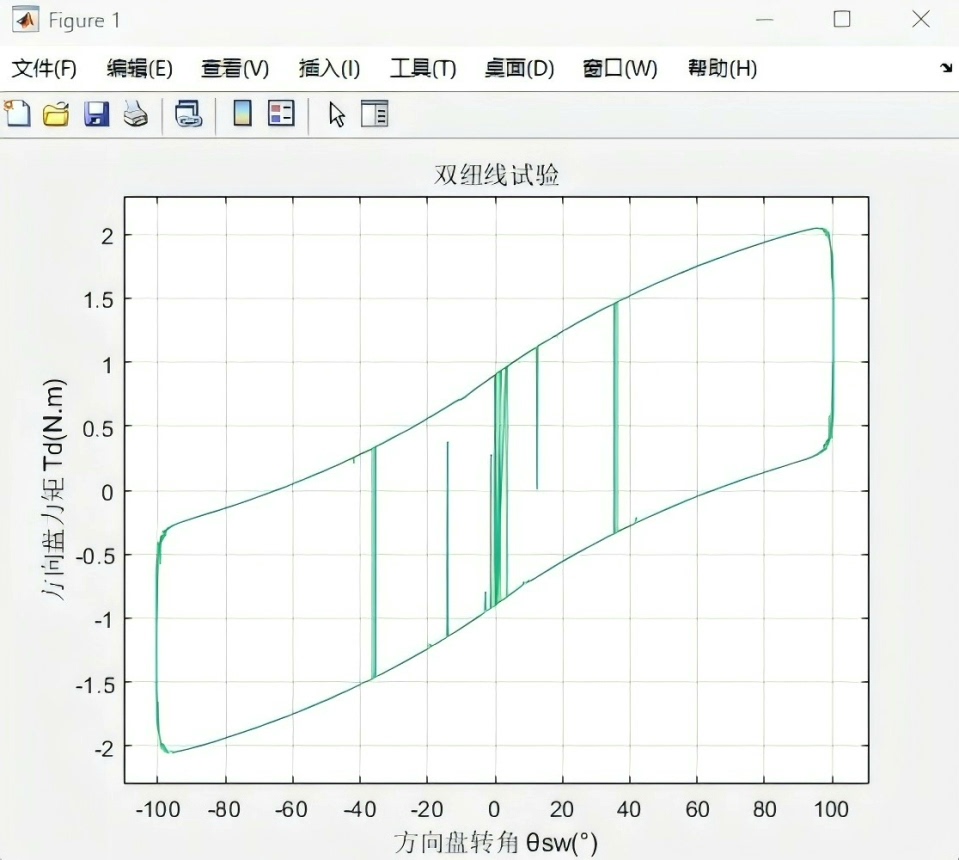
- 模拟与预测:通过参数拟合得到的模型,我们可以对不同路况下的路感进行模拟和预测。这包括预测不同转向角度下的转向力矩、不同车速下的路感变化等。
- 结果评估与优化:对模拟和预测结果进行评估,包括准确度、实时性等方面。根据评估结果对模型进行优化,提高模拟和预测的精度。
四、Matlab 2017a及以上的应用
Matlab 2017a及以上版本提供了丰富的数据处理和拟合工具,能够方便地实现基于参数拟合法的线控转向路感模拟。具体应用包括:
- 数据处理:Matlab提供了强大的数据处理功能,包括数据导入、清洗、预处理等。这有助于我们快速获取和处理路感模拟所需的数据。
- 拟合工具:Matlab提供了多种拟合算法和模型,如多项式拟合、指数拟合、非线性拟合等。这为我们选择合适的拟合算法提供了便利。
- 仿真与预测:Matlab具有强大的仿真和预测功能,能够实现对不同路况下的路感进行模拟和预测。这有助于我们评估线控转向的性能和优化设计方案。
- 结果可视化:Matlab提供了丰富的可视化工具,能够将模拟和预测结果以图表的形式展示出来,便于我们直观地了解和分析结果。
五、结论
基于参数拟合法的线控转向路感模拟是一种有效的技术手段,能够为线控转向的设计提供有力支持。Matlab 2017a及以上的应用为该技术的应用提供了便利的工具和平台。通过数据采集、参数拟合、模拟与预测以及结果评估与优化等步骤,我们能够实现对不同路况下的路感进行精确的模拟和预测,从而提高驾驶者的操控体验。未来,随着线控转向技术的不断发展,基于参数拟合法的路感模拟技术将具有更广泛的应用前景。
基于参数拟合法的线控转向路感模拟
Matlab2017a及以上可使用


















 253
253

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









