








Android实现红绿灯检测(含Android源码 可实时运行)
目录
Android实现红绿灯检测(含Android源码 可实时运行)
1. 前言
本篇博客是《深度学习目标检测:YOLOv5实现红绿灯检测(含红绿灯数据集+训练代码)》续作Android篇,主要分享将Python训练后的YOLOv5的红绿灯检测模型移植到Android平台。我们将开发一个简易的、可实时运行的红绿灯检测Android Demo。
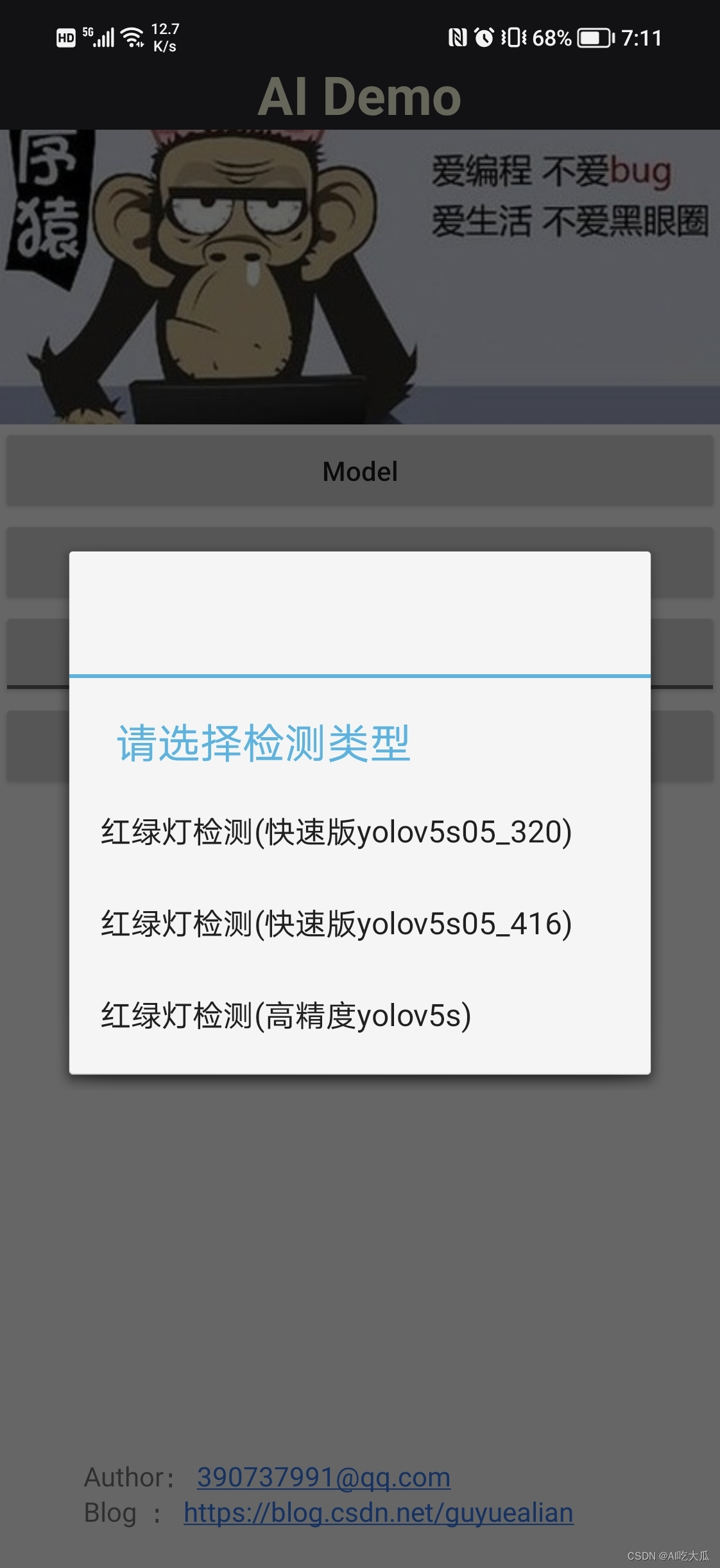
考虑到原始YOLOv5的模型计算量比较大,鄙人在YOLOv5s基础上,开发了一个非常轻量级的的红绿灯检测模型yolov5s05_320。从效果来看,Android红绿灯检测模型的检测效果还是可以的,高精度版本YOLOv5s平均精度平均值mAP_0.5=0.93919,而轻量化版本yolov5s05_416平均精度平均值mAP_0.5=0.71944左右。APP在普通Android手机上可以达到实时的检测识别效果,CPU(4线程)约30ms左右,GPU约25ms左右 ,基本满足业务的性能需求。
先展示一下Android Demo效果:
|
|  |  |

【Android APP体验】Android实现红绿灯检测APP(可实时运行))
【尊重原创,转载请注明出处】https://blog.csdn.net/guyuealian/article/details/128240334
更多项目《智能驾驶 车牌检测和识别》系列文章请参考:
- 智能驾驶 车牌检测和识别(一)《CCPD车牌数据集》:智能驾驶 车牌检测和识别(一)《CCPD车牌数据集》_ccpd数据集在那里下载-CSDN博客
- 智能驾驶 车牌检测和识别(二)《YOLOv5实现车牌检测(含车牌检测数据集和训练代码)》:智能驾驶 车牌检测和识别(二)《YOLOv5实现车牌检测(含车牌检测数据集和训练代码)》_yolo车牌识别数据集-CSDN博客
- 智能驾驶 车牌检测和识别(三)《CRNN和LPRNet实现车牌识别(含车牌识别数据集和训练代码)》:智能驾驶 车牌检测和识别(三)《CRNN和LPRNet实现车牌识别(含车牌识别数据集和训练代码)》_crnn车牌识别-CSDN博客
- 智能驾驶 车牌检测和识别(四)《Android实现车牌检测和识别(可实时车牌识别)》:智能驾驶 车牌检测和识别(四)《Android实现车牌检测和识别(可实时车牌识别)》_车牌识别安卓部署-CSDN博客
- 智能驾驶 车牌检测和识别(五)《C++实现车牌检测和识别(可实时车牌识别)》:智能驾驶 车牌检测和识别(五)《C++实现车牌检测和识别(可实时车牌识别)》_yolox识别空余车位 c++-CSDN博客
- 智能驾驶 红绿灯检测(一)《红绿灯(交通信号灯)数据集》:红绿灯(交通信号灯)检测数据集_红绿灯数据集-CSDN博客
- 智能驾驶 红绿灯检测(二)《YOLOv5实现红绿灯检测(含红绿灯数据集+训练代码)》:深度学习目标检测:YOLOv5实现红绿灯检测(含红绿灯数据集+训练代码)_yolo交通信号灯识别-CSDN博客
- 智能驾驶 红绿灯检测(三)《Android实现红绿灯检测(含Android源码 可实时运行)》:Android实现红绿灯检测(含Android源码 可实时运行)_实时红绿灯接口-CSDN博客
-
智能驾驶 车辆检测(一)《UA-DETRAC BITVehicle车辆检测数据集》:UA-DETRAC BITVehicle车辆检测数据集(含下载地址)_ua-detrac数据集-CSDN博客
-
智能驾驶 车辆检测(二)《YOLOv5实现车辆检测(含车辆检测数据集+训练代码)》:深度学习目标检测:YOLOv5实现车辆检测(含车辆检测数据集+训练代码)-CSDN博客
-
智能驾驶 车辆检测(三)《Android实现车辆检测(含Android源码 可实时运行)》:https://blog.csdn.net/guyuealian/article/details/128190532

2. 红绿灯检测数据集说明
目前收集了约1W+的红绿灯(交通信号灯)检测数据集:Traffic-Lights-Dataset-Domestic+Traffic-Lights-Dataset-Foreign:
关于红绿灯检测数据集使用说明和下载,详见另一篇博客说明:《红绿灯(交通信号灯)检测数据集》
3. 基于YOLOv5的红绿灯检测模型训练
官方YOLOv5给出了YOLOv5l,YOLOv5m,YOLOv5s等模型。考虑到手机端CPU/GPU性能比较弱鸡,直接部署yolov5s运行速度十分慢。所以本人在yolov5s基础上进行模型轻量化处理,即将yolov5s的模型的channels通道数全部都减少一半,并且模型输入由原来的640×640降低到416×416或者320×320,该轻量化的模型我称之为yolov5s05。从性能来看,yolov5s05比yolov5s快5多倍,而mAP下降了16%(0.93→0.77),对于手机端,这精度勉强可以接受。
下面是yolov5s05和yolov5s的参数量和计算量对比:
| 模型 | input-size | params(M) | GFLOPs | mAP0.5 |
| yolov5s | 640×640 | 7.2 | 16.5 | 0.93919 |
| yolov5s05 | 416×416 | 1.7 | 1.8 | 0.77174 |
| yolov5s05 | 320×320 | 1.7 | 1.1 | 0.71944 |
yolov5s05和yolov5s训练过程完全一直,仅仅是配置文件不一样而已;碍于篇幅,本篇博客不在赘述,详细训练过程请参考: 《深度学习目标检测:YOLOv5实现红绿灯检测(含红绿灯数据集+训练代码)》
4.红绿灯检测模型Android部署
(1) 将Pytorch模型转换ONNX模型
训练好yolov5s05或者yolov5s模型后,你需要将模型转换为ONNX模型,并使用onnx-simplifier简化网络结构
# 转换yolov5s05模型
python export.py --weights "runs/yolov5s05_320/weights/best.pt" --img-size 320 320
# 转换yolov5s模型
python export.py --weights "runs/yolov5s_640/weights/best.pt" --img-size 640 640GitHub: https://github.com/daquexian/onnx-simplifier
Install: pip3 install onnx-simplifier
(2) 将ONNX模型转换为TNN模型
目前CNN模型有多种部署方式,可以采用TNN,MNN,NCNN,以及TensorRT等部署工具,鄙人采用TNN进行Android端上部署:
TNN转换工具:
- (1)将ONNX模型转换为TNN模型,请参考TNN官方说明:TNN/onnx2tnn.md at master · Tencent/TNN · GitHub
- (2)一键转换,懒人必备:一键转换 Caffe, ONNX, TensorFlow 到 NCNN, MNN, Tengine (可能存在版本问题,这个工具转换的TNN模型可能不兼容,建议还是自己build源码进行转换,2022年9约25日测试可用)

(3) Android端上部署模型
项目实现了Android版本的红绿灯检测Demo,部署框架采用TNN,支持多线程CPU和GPU加速推理,在普通手机上可以实时处理。Android源码核心算法YOLOv5部分均采用C++实现,上层通过JNI接口调用
package com.cv.tnn.model;
import android.graphics.Bitmap;
public class Detector {
static {
System.loadLibrary("tnn_wrapper");
}
/***
* 初始化模型
* @param model: TNN *.tnnmodel文件文件名(含后缀名)
* @param root:模型文件的根目录,放在assets文件夹下
* @param model_type:模型类型
* @param num_thread:开启线程数
* @param useGPU:关键点的置信度,小于值的坐标会置-1
*/
public static native void init(String model, String root, int model_type, int num_thread, boolean useGPU);
/***
* 检测
* @param bitmap 图像(bitmap),ARGB_8888格式
* @param score_thresh:置信度阈值
* @param iou_thresh: IOU阈值
* @return
*/
public static native FrameInfo[] detect(Bitmap bitmap, float score_thresh, float iou_thresh);
}
如果你想在这个Android Demo部署你自己训练的YOLOv5模型,你可将训练好的Pytorch模型转换ONNX ,再转换成TNN模型,然后把TNN模型代替你模型即可。

(4) 一些异常错误解决方法
-
TNN推理时出现:Permute param got wrong size
官方YOLOv5: GitHub - ultralytics/yolov5: YOLOv5 🚀 in PyTorch > ONNX > CoreML > TFLite
如果你是直接使用官方YOLOv5代码转换TNN模型,部署TNN时会出现这个错误Permute param got wrong size,这是因为TNN最多支持4个维度计算,而YOLOv5在输出时采用了5个维度。你需要修改model/yolo.py文件

export.py文件设置model.model[-1].export = True:
.....
# Exports
if 'torchscript' in include:
export_torchscript(model, img, file, optimize)
if 'onnx' in include:
model.model[-1].export = True # TNN不支持5个维度,修改输出格式
export_onnx(model, img, file, opset, train, dynamic, simplify=simplify)
if 'coreml' in include:
export_coreml(model, img, file)
# Finish
print(f'\nExport complete ({time.time() - t:.2f}s)'
f"\nResults saved to {colorstr('bold', file.parent.resolve())}"
f'\nVisualize with https://netron.app')
.....
- TNN推理时效果很差,检测框一团麻

这个问题,大部分是模型参数设置错误,需要根据自己的模型,修改C++推理代码YOLOv5Param模型参数。
struct YOLOv5Param {
ModelType model_type; // 模型类型,MODEL_TYPE_TNN,MODEL_TYPE_NCNN等
int input_width; // 模型输入宽度,单位:像素
int input_height; // 模型输入高度,单位:像素
bool use_rgb; // 是否使用RGB作为模型输入(PS:接口固定输入BGR,use_rgb=ture时,预处理将BGR转换为RGB)
bool padding;
int num_landmarks; // 关键点个数
NetNodes InputNodes; // 输入节点名称
NetNodes OutputNodes; // 输出节点名称
vector<YOLOAnchor> anchors;
vector<string> class_names; // 类别集合
};
input_width和input_height是模型的输入大小;vector<YOLOAnchor> anchors需要对应上,注意Python版本的yolov5s的原始anchor是
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
而yolov5s05由于input size由原来640变成320,anchor也需要做对应调整:
anchors:
- [ 1,3, 2,5, 3,7 ]
- [ 4,9, 9,5, 5,12 ]
- [ 7,17, 9,25, 17,38 ]因此C++版本的yolov5s和yolov5s05的模型参数YOLOv5Param如下设置
//YOLOv5s模型参数
static YOLOv5Param YOLOv5s_640 = {MODEL_TYPE_TNN,
640,
640,
true,
true,
0,
{{{"images", nullptr}}}, //InputNodes
{{{"boxes", nullptr}, //OutputNodes
{"scores", nullptr}}},
{
{"434", 32, {{12, 32}, {17, 47}, {35, 76}}},
{"415", 16, {{6, 17}, {18, 8}, {9, 22}}},
{"output", 8, {{2, 6}, {3, 9}, {5, 12}}},
},
CLASS_NAME
};
//YOLOv5s05模型参数
static YOLOv5Param YOLOv5s05_ANCHOR_416 = {MODEL_TYPE_TNN,
416,
416,
true,
true,
0,
{{{"images", nullptr}}}, //InputNodes
{{{"boxes", nullptr}, //OutputNodes
{"scores", nullptr}}},
{
{"434", 32, {{7, 18}, {10, 27}, {18, 45}}},
{"415", 16, {{4, 11}, {5, 13}, {12, 6}}},
{"output", 8, {{2, 4}, {2, 6}, {3, 8}}}, //
},
CLASS_NAME
};
//YOLOv5s05模型参数
static YOLOv5Param YOLOv5s05_ANCHOR_320 = {MODEL_TYPE_TNN,
320,
320,
true,
true,
0,
{{{"images", nullptr}}}, //InputNodes
{{{"boxes", nullptr}, //OutputNodes
{"scores", nullptr}}},
{
{"434", 32, {{7, 17}, {9, 25}, {17, 38}}},
{"415", 16, {{4, 9}, {9, 5}, {5, 12}}},
{"output", 8, {{1, 3}, {2, 5}, {3, 7}}}, //
},
CLASS_NAME
};
- 运行APP闪退:dlopen failed: library "libomp.so" not found
参考解决方法:解决dlopen failed: library “libomp.so“ not found_PKing666666的博客-CSDN博客_dlopen failed
5. 红绿灯检测效果
【Android APP体验】Android实现红绿灯检测APP(可实时运行))
APP在普通Android手机上可以达到实时的红绿灯检测效果,CPU(4线程)约30ms左右,GPU约25ms左右 ,基本满足业务的性能需求。
|
| | |
6.项目源码下载
【Android APP体验】Android实现红绿灯检测APP(可实时运行))
如需下载项目源码,请WX关注【AI吃大瓜】,回复【红绿灯】即可下载
项目资源内容包含:
整套Android项目源码内容包含:
- 提供快速版yolov5s05红绿灯检测模型,在普通手机可实时检测识别,CPU(4线程)约30ms左右,GPU约25ms左右
- 提供高精度版本yolov5s红绿灯检测模型,CPU(4线程)约250ms左右,GPU约100ms左右
- Demo支持图片,视频,摄像头测试
- 所有依赖库都已经配置好,可直接build运行,若运行出现闪退,请参考dlopen failed: library “libomp.so“ not found 解决。
如果你需要红绿灯检测数据集:《红绿灯(交通信号灯)检测数据集》
如果你需要红绿灯训练代码:《YOLOv5实现红绿灯检测(含红绿灯数据集+训练代码)》
更多项目《智能驾驶 车牌检测和识别》系列文章请参考:
- 智能驾驶 车牌检测和识别(一)《CCPD车牌数据集》:智能驾驶 车牌检测和识别(一)《CCPD车牌数据集》_ccpd数据集在那里下载-CSDN博客
- 智能驾驶 车牌检测和识别(二)《YOLOv5实现车牌检测(含车牌检测数据集和训练代码)》:智能驾驶 车牌检测和识别(二)《YOLOv5实现车牌检测(含车牌检测数据集和训练代码)》_yolo车牌识别数据集-CSDN博客
- 智能驾驶 车牌检测和识别(三)《CRNN和LPRNet实现车牌识别(含车牌识别数据集和训练代码)》:智能驾驶 车牌检测和识别(三)《CRNN和LPRNet实现车牌识别(含车牌识别数据集和训练代码)》_crnn车牌识别-CSDN博客
- 智能驾驶 车牌检测和识别(四)《Android实现车牌检测和识别(可实时车牌识别)》:智能驾驶 车牌检测和识别(四)《Android实现车牌检测和识别(可实时车牌识别)》_车牌识别安卓部署-CSDN博客
- 智能驾驶 车牌检测和识别(五)《C++实现车牌检测和识别(可实时车牌识别)》:智能驾驶 车牌检测和识别(五)《C++实现车牌检测和识别(可实时车牌识别)》_yolox识别空余车位 c++-CSDN博客
- 智能驾驶 红绿灯检测(一)《红绿灯(交通信号灯)数据集》:红绿灯(交通信号灯)检测数据集_红绿灯数据集-CSDN博客
- 智能驾驶 红绿灯检测(二)《YOLOv5实现红绿灯检测(含红绿灯数据集+训练代码)》:深度学习目标检测:YOLOv5实现红绿灯检测(含红绿灯数据集+训练代码)_yolo交通信号灯识别-CSDN博客
- 智能驾驶 红绿灯检测(三)《Android实现红绿灯检测(含Android源码 可实时运行)》:Android实现红绿灯检测(含Android源码 可实时运行)_实时红绿灯接口-CSDN博客
-
智能驾驶 车辆检测(一)《UA-DETRAC BITVehicle车辆检测数据集》:UA-DETRAC BITVehicle车辆检测数据集(含下载地址)_ua-detrac数据集-CSDN博客
-
智能驾驶 车辆检测(二)《YOLOv5实现车辆检测(含车辆检测数据集+训练代码)》:深度学习目标检测:YOLOv5实现车辆检测(含车辆检测数据集+训练代码)-CSDN博客
-
智能驾驶 车辆检测(三)《Android实现车辆检测(含Android源码 可实时运行)》:https://blog.csdn.net/guyuealian/article/details/128190532


















 10万+
10万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











