






效果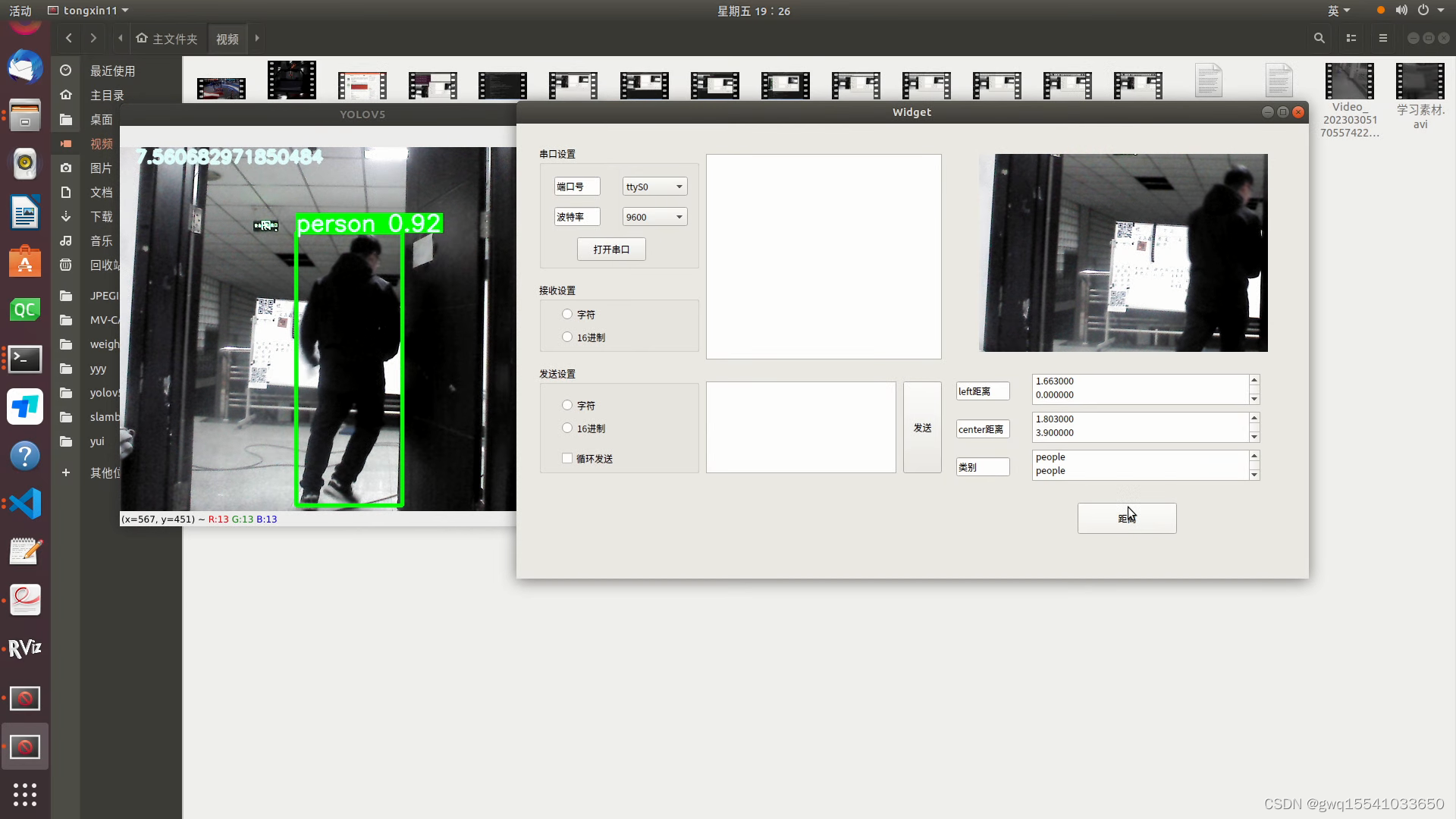
实现
本项目采用ros框架,用yolov5作为识别模块,采用奥比中光astra深度相机测距,ui界面显示实时图像,点击显示距离。
代码解释:
思路是把yolov5封装成功能包,用python写一个ros收发接口调用模型。主函数接受yolov5模块识别到的数据,调用深度图像得到距离,再把图像和距离显示在ui界面上。
本程序预留串口通信,可与嵌入式端进行通信,扩展成更多项目。
main.cpp
#include <ros/ros.h>
#include <sensor_msgs/Image.h>
#include <sensor_msgs/image_encodings.h>
#include <cv_bridge/cv_bridge.h>
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <image_transport/image_transport.h>
#include <sensor_msgs/Image.h>
#include <sensor_msgs/CameraInfo.h>
#include <opencv2/highgui/highgui.hpp>
#include <cv_bridge/cv_bridge.h>
#include <message_filters/subscriber.h>
#include <message_filters/time_synchronizer.h>
#include<message_filters/sync_policies/approximate_time.h>
#include <pcl/point_cloud.h>
#include<thread>
#include<pcl/point_types.h>
#include<pcl_conversions/pcl_conversions.h>
#include<pcl/visualization/cloud_viewer.h>
#include <sensor_msgs/PointCloud2.h>
#include "widget.h"
#include <QApplication>
#include "std_msgs/String.h"
using namespace std;
using namespace sensor_msgs;
using namespace message_filters;
using namespace cv;
typedef pcl::PointXYZRGB PointT;
typedef pcl::PointCloud<PointT> testcloud;
//#include<realsense_dev/depth_value.h> //自定义一个消息类型
cv::Mat depth_pic; //定义全局变量,图像矩阵Mat形式
String some="someee";
char some1[30];
//realsense_dev::depth_value command_to_pub; //待发布数据
double x,y,z;
int n=0;
void depthCallback(const sensor_msgs::Image::ConstPtr&msg)
{
cv_bridge::CvImagePtr Dest ;
Dest = cv_bridge::toCvCopy(msg,sensor_msgs::image_encodings::TYPE_16UC1);
depth_pic = Dest->image;
//cout<<"Output some info about the depth image in cv format"<<endl;
//cout<< "Rows of the depth iamge = "<<depth_pic.rows<<endl; //获取深度图的行数height
//cout<< "Cols of the depth iamge = "<<depth_pic.cols<<endl; //获取深度图的列数width
//cout<< "Type of depth_pic's element = "<<depth_pic.type()<<endl; //深度图的类型
ushort Ld = depth_pic.at<ushort>(command_to_pub2.x+5,command_to_pub2.y+5); //读取深度值,数据类型为ushort单位为mm
ushort Rd = depth_pic.at<ushort>((command_to_pub2.x1+command_to_pub2.x)/2,(command_to_pub2.y1+command_to_pub2.y)/2); //读取深度值,数据类型为ushort单位为mm
//ushort Ld = depth_pic.at<ushort>(400,788); //读取深度值,数据类型为ushort单位为mm
//ushort Rd = depth_pic.at<ushort>(406,800); //读取深度值,数据类型为ushort单位为mm
Rd_value = float(Rd)/1000 ; //强制转换
Ld_value = float(Ld)/1000 ; //强制转换
cout<< "Value of Rdepth_pic's pixel= "<<Rd_value<< "Value of Ldepth_pic's pixel= "<<Ld_value<<endl; //读取深度值
}
void imageCallback(const sensor_msgs::ImageConstPtr& msg)
{
// clock_t start,ends;
// start=clock();
try
{
cv::Mat image = cv_bridge::toCvShare(msg, "bgra8")->image; //image_raw就是我们得到的图像了
int rows = image.rows;//std::cout<<"rows="<<rows<<std::endl;
int cols = image.cols;//std::cout<<"cols="<<cols<<std::endl;
cvimage=image;
}
catch (cv_bridge::Exception &e)
{
ROS_ERROR("Could not conveextrinsicMat_RT from '%s' to 'rgb8'.", msg->encoding.c_str());
}
// ends=clock();
// std::cout<<"img call:"<<(double (ends-start)/CLOCKS_PER_SEC)<<std::endl;
}
void leidaCallback(const std_msgs::String::ConstPtr& msg_p)
{
ROS_INFO("%s",msg_p->data.c_str());
some=msg_p->data.c_str();
//ROS_INFO("我听见:%s",(*msg_p).data.c_str());
char x[6],y[6],x1[6],y1[6];
int i;
for(i=0;i<some.length();i++)
{
if(some[i-1]=='F' && some[i]=='C')
{
command_to_pub1.Value[0]=some[i+1];
command_to_pub1.Value[1]=some[i+2];
}
if(some[i-1]=='y') //x y q w h
{
for(int q=0;q<6;q++)
{
if(some[i+q]!= '.' )
{
y[q]=some[i+q];
if(some[i+q]== 'q' )
{
break;
}
}
else
{
continue;
}
}
}
if(some[i-1]=='x')
{
for(int q=0;q<6;q++)
{
if(some[i+q]!= '.' )
{
x[q]=some[i+q];
if(some[i+q]== 'y' )
{
break;
}
}
else
{
continue;
}
}
}
if(some[i-1]== 'w' )
{
for(int q=0;q<6;q++)
{
if(some[i+q]!= '.' )
{
y1[q]=some[i+q];
if(some[i+q]== 'h' )
{
break;
}
}
else
{
continue;
}
}
}
if( some[i-1]== 'q' )
{
for(int q=0;q<6;q++)
{
if(some[i+q]!= '.' )
{
x1[q]=some[i+q];
if(some[i+q]== 'w' )
{
break;
}
}
else
{
continue;
}
}
}
}
command_to_pub2.x = atoi(x);
command_to_pub2.y= atoi(y);
command_to_pub2.x1= atoi(x1);
command_to_pub2.y1= atoi(y1);
printf("\nsome:%d,%d,%d,%d",command_to_pub2.x,command_to_pub2.y,command_to_pub2.x1,command_to_pub2.y1);
}
int uuu(int argc, char *argv[])
{
QApplication a(argc, argv);
Widget w;
w.show();
return a.exec();
}
void ttt(int argc, char *argv[])
{
ros::init(argc, argv, "stream_pub"); // ros节点初始化
ros::NodeHandle nh; //创建节点句柄
image_transport::ImageTransport it(nh);
ros::AsyncSpinner spinner(1);
spinner.start();
ros::Subscriber sub1 = nh.subscribe<std_msgs::String>("/leida_num",1,leidaCallback);
ros::Subscriber image_sub = nh.subscribe<sensor_msgs::Image>("/camera/depth/image_raw",1,depthCallback); //订阅深度图像
image_transport::Subscriber sub = it.subscribe("/camera/color/image_raw", 1, &imageCallback);
//ros::Subscriber element_sub = nh.subscribe<sensor_msgs::Image>("/camera/aligned_depth_to_color/image_raw",100,pixelCallback); //订阅像素点坐标
//ros::Publisher mode_pub = nh.advertise<realsense_dev::depth_value>("/depth_info", 10);
//command_to_pub.Value = 0; //初始化深度值
ros::Rate rate(20.0); //设定自循环的频率
while(ros::ok)
{
//command_to_pub.header.stamp = ros::Time::now();
//command_to_pub.Value = d_value; //depth_pic.rows/2,depth_pic.cols/2 为像素点
}
ros::Duration(10).sleep(); //设定自循环的频率
}
int main(int argc,char *argv[])
{
int yt;
thread th2(uuu,argc, argv);
thread th3(ttt,argc, argv);
//uuu(argc, argv);
th2.join();
th3.join();
return yt;
}
widget.cpp片段
void Widget::showww()
{
Rect rect(command_to_pub2.x,command_to_pub2.y,
command_to_pub2.x1-command_to_pub2.x,command_to_pub2.y1-command_to_pub2.y);
Mat mat = cvimage;
//cvtColor( mat, mat, COLOR_BGR2RGB);//BGR转化为RGB
QImage::Format format = QImage::Format_ARGB32;
switch ( mat.type())
{
case CV_8UC1:
format = QImage::Format_Indexed8;
break;
case CV_8UC3:
format = QImage::Format_RGB888;
break;
case CV_8UC4:
format = QImage::Format_ARGB32;
break;
}
QImage image = QImage((const uchar*) mat.data, mat.cols, mat.rows,
mat.cols * mat.channels(), format);
/*cvtColor(mat, mat, CV_BGR2RGB);
QImage image(mat.data,
mat.cols,
mat.rows,
mat.step,
QImage::Format_RGB888);*/
//QString filename("/home/q/图片/标定二维码/image/1.bmp");
QImage* img=new QImage;
img=ℑ
ui->labImgShow->setPixmap(QPixmap::fromImage(*img));
timer->start(20);//启动计时器
}
void Widget::text()
{
float uio=5.8;
String utf5=to_string( Ld_value);
char utf8[20];
strcpy( utf8,utf5.c_str());
QString str2=QString::fromUtf8(utf8);
ui->Ldepth_textEdit->append(str2); //接收区显示 -- 追加方式
ui->Ldepth_textEdit->show();
String utf6=to_string( Rd_value);
char utf9[20];
strcpy( utf9,utf6.c_str());
QString str3=QString::fromUtf8(utf9);
ui->Rdepth_textEdit->append(str3); //接收区显示 -- 追加方式
ui->Rdepth_textEdit->show();
String utf59= "people";
char utf89[20];
strcpy( utf89,utf59.c_str());
QString str26=QString::fromUtf8(utf89);
ui->name_textEdit->append(str26); //接收区显示 -- 追加方式
ui->name_textEdit->show();
}yolov5识别片段
# src=cv2.imread('biye.jpg')
def detect(img):
time1 = time.time()
global ros_image
global xytoxy
global label_name
cudnn.benchmark = True
dataset = loadimg(img)
# print(dataset[3])
# plt.imshow(dataset[2][:, :, ::-1])
names = model.module.names if hasattr(model, 'module') else model.names
# colors = [[random.randint(0, 255) for _ in range(3)] for _ in range(len(names))]
# colors=[[0,255,0]]
augment = 'store_true'
conf_thres = 0.3
iou_thres = 0.45
classes = (0, 1, 2, 3, 5, 7)
agnostic_nms = 'store_true'
img = torch.zeros((1, 3, imgsz, imgsz), device=device) # init img
_ = model(img.half() if half else img) if device.type != 'cpu' else None # run once
path = dataset[0]
img = dataset[1]
im0s = dataset[2]
vid_cap = dataset[3]
img = torch.from_numpy(img).to(device)
img = img.half() if half else img.float() # uint8 to fp16/32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
time2 = time.time()
if img.ndimension() == 3:
img = img.unsqueeze(0)
# Inference
pred = model(img, augment=augment)[0]
# Apply NMS
pred = non_max_suppression(pred, conf_thres, iou_thres, classes=classes, agnostic=agnostic_nms)
view_img = 1
save_txt = 1
save_conf = 'store_true'
time3 = time.time()
for i, det in enumerate(pred): # detections per image
p, s, im0 = path, '', im0s
s += '%gx%g ' % img.shape[2:] # print string
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
if det is not None:
# print(det)
# Rescale boxes from img_size to im0 size
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
# Print results
for c in det[:, -1].unique():
n = (det[:, -1] == c).sum() # detections per class
s += '%g %ss, ' % (n, names[int(c)]) # add to string
# Write results
for *xyxy, conf, cls in reversed(det):
if save_txt: # Write to file
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
line = (cls, conf, *xywh) if save_conf else (cls, *xywh) # label format
y = torch.tensor(xyxy).view(1, 4)
xy = y.clone() if isinstance(y, torch.Tensor) else np.copy(y)
xytoxy = xy.view(-1).tolist()
if view_img: # Add bbox to image
label = '%s %.2f' % (names[int(cls)], conf)
label_name = names[int(cls)]
plot_one_box(xyxy, im0, label=label, color=[0, 255, 0], line_thickness=3)
time4 = time.time()
cv2.putText(im0, str(fps), (20, 20), 0, 0.75, [225, 255, 255], thickness=3, lineType=cv2.LINE_AA)
print('************')
print('2-1', time2 - time1)
print('3-2', time3 - time2)
print('4-3', time4 - time3)
print('total', time4 - time1)
print('xy2xy', xytoxy[0])
print("label_name:", label_name)
some = "FC" + str(label_name) + "x" + str(xytoxy[0]) + "y" + str(xytoxy[1]) + "q" + str(xytoxy[2]) + "w" + str(xytoxy[3]) +"h"+ "RA"
print("label_name:", some)
out_img = im0[:, :, [2, 1, 0]]
ros_image = out_img
cv2.imshow('YOLOV5', out_img)
a = cv2.waitKey(1)
#### Create CompressedIamge ####
# publish_image(im0)
publish_image1(some)CmakeList.cpp
cmake_minimum_required(VERSION 3.5)
project(picture2pcl)
## Compile as C++11, supported in ROS Kinetic and newer
#add_compile_options(-std=c++11)
set(CMAKE_CXX_STANDARD 11)
set(CMAKE_CXX_STANDARD_REQUIRED True)
set(CMAKE_AUTOUIC ON)
set(CMAKE_AUTOMOC ON)
set(CMAKE_AUTORCC ON)
find_library(librealsense REQUIRED)
find_package(catkin REQUIRED COMPONENTS
geometry_msgs
roscpp
rospy
std_msgs
cv_bridge
message_generation
image_transport
pcl_ros
sensor_msgs
tf
)
find_package(Eigen3 REQUIRED)
find_package(PCL REQUIRED)
#find_package(realsense2 REQUIRED)
find_package(OpenCV REQUIRED)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES realsense_dev
CATKIN_DEPENDS roscpp std_msgs
DEPENDS EIGEN3 PCL OpenCV
INCLUDE_DIRS
# DEPENDS system_lib
)
include_directories(
# include
${catkin_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
${EIGEN3_INCLUDE_DIR}
${PCL_INCLUDE_DIRS}
)
#add_executable(stream_pub src/stream_pub.cpp)
#target_link_libraries(stream_pub ${catkin_LIBRARIES} ${OpenCV_LIBS})
#add_executable(main src/main.cpp src/serial_communication.cpp )
#find_package(Qt5 COMPONENTS Widgets REQUIRED)
#find_package(Qt5 COMPONENTS Core SerialPort REQUIRED)
find_package(Qt5Widgets REQUIRED)
find_package(Qt5Core REQUIRED)
find_package(Qt5Gui REQUIRED)
find_package(Qt5SerialPort REQUIRED)
if(ANDROID)
add_library(tongxin11 SHARED
src/main.cpp
src/serial_communication.cpp
src/serial_communication.h
src/main.cpp
src/widget.cpp
src/widget.h
src/widget.ui
)
else()
add_executable(tongxin11
src/main.cpp
src/serial_communication.cpp
src/serial_communication.h
src/main.cpp
src/main.cpp
src/widget.cpp
src/widget.h
src/widget.ui
)
endif()
target_link_libraries(tongxin11 ${Qt5Core_LIBRARIES} ${Qt5Widgets_LIBRARIES} ${Qt5SerialPort_LIBRARIES} ${catkin_LIBRARIES} ${PCL_LIBRARIES} ${OpenCV_LIBS} -lpthread -luuid)
#target_link_libraries(serialportLIB ${Qt5Core_LIBRARIES} ${Qt5Widgets_LIBRARIES} ${Qt5SerialPort_LIBRARIES})
#target_link_libraries(tongxin11 ${catkin_LIBRARIES} ${PCL_LIBRARIES} ${OpenCV_LIBS})
奥比中光深度相机驱动















 2388
2388

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









