







一.使用前要求:linux
1.ubuntu16.04系统安装Ros系统kinetic版本(安装教程看我上一篇博文)
2.奥比中光摄像头(astra )一个
3.注意这里是astra款式的相机,不是astro pro
4.淘宝买的那个便宜的是astro pro的,以下为官方文件说明
5.分界线以前都本身亲自测试过

二.ROS-Astra-SDK 获取方式
1.在 Ubuntu Indigo 及其以上版本能够直接经过 apt 的方式安装
本文用的是ubuntu kinetic版本
$ sudo apt-get install ros-kinetic-astra-camera
$ sudo apt-get install ros-kinetic-astra-launch
(若是是其余版本只须要把对应的kinetic换成其余版本便可)svg
三.ROS-Astra-SDK 基本结构

四.ROS-Astra-SDK 运行及数据获取方式工具
1.Astra 运行
经过 roslaunch 方式 便可启动 Astra 相机
在终端输入: $ roslaunch astra_launch astra.launch
看到SUMMARY表示运行正确
2.获取数据测试
1).经过 rostopic 的方式查看发布数据是否正常
经过快捷键ctrl+alt+T再打开一个终端输入:
$ rostopic list
上述发布的除了 image_raw 部分由 Astra 驱动直接发布,大部分都是经过
rgbd_launch 进行修改后发布。若是仅仅须要获取原始摄像头信息,主要关注下面 3
个 topic。
/camera/rgb/image_raw
/camera/depth/image_raw
/camera/ir/image_raw
请注意因为 openni2 的限制,rgb 和 ir 没法同时输出。
若是须要获取点云数据,访问下面两个 topic
/camera/depth/points
/camera/depth_registered/pointsui
2).查看相机信息.net
在当前终端中输入:
$ rostopic echo /camera/depth/camera_info
3).查看话题发布频率xml
$ rostopic hz /camera/depth/image_raw
4)查看深度数据blog
$ rostopic echo /camera/depth/image_raw
查看rgb和ir数据只需将上面的命令中的depth换成rgb或是ir便可
$ rostopic echo /camera/rgb/image_raw
$ rostopic echo /camera/ir/image_raw
可是因为上面提到的OpenNI暂时只能显示深度信息,后文会继续讲解
五.Image_view 显示深度数据
经过安装 image_view 工具直观查看摄像头发布的数据
$ sudo apt-get install ros-kinectic-image-view
-
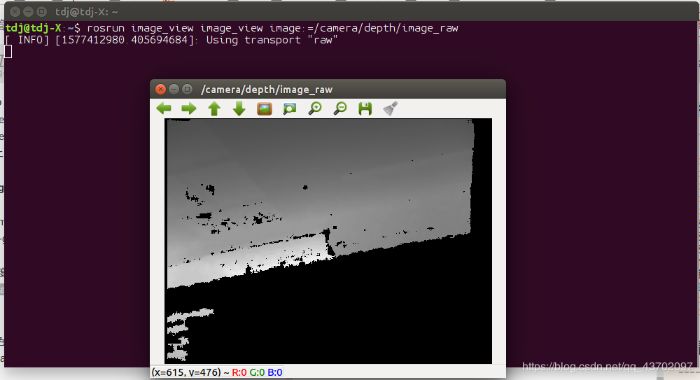
查看深度图
$rosrun image_view image_view image:=/camera/depth/image_raw
如下两个暂时没法显示,后文继续讲解
-
查看彩色图
$rosrun image_view image_view image:=/camera/rgb/image_raw -
查看 IR 图
$rosrun image_view image_view image:=/camera/ir/image
******这是美丽的分割线*********
目前按照官方教程只能走下来只能显示到深度图,经过查找资料和查看的博文(https://blog.csdn.net/dddxxxx/article/details/78510532)
须要安装OPenNI,因为本身买的是淘宝的astro pro版本的,下面没有测试过.
1.安装依赖:
sudo apt-get install build-essential freeglut3 freeglut3-dev
2.检查udev版本,须要libudev.so.1,若是没有则添加
$ldconfig -p | grep libudev.so.1
$cd /lib/x86_64-linux-gnu
$sudo ln -s libudev.so.x.x.x libudev.so.1
3.下载OpenNI驱动(去奥比中光官网下载)
$ cd OpenNI-Linux-x64-2.3.0.63
4.安装
$ sudo chmod a+x install.sh
$ sudo ./install.sh
5.重插设备
6.加入环境
$ source OpenNIDevEnvironment
7.编译例子
$ cd Samples/SimpleViewer
$ make
8.链接设备,执行例子
$ cd Bin/x64-Release $ ./SimpleViewer 无没有问题,则显示正常视图















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









