









目录
个人搭建介绍:
Ubuntu:18.04
安装教程:VMware+Ubuntu18.04
ROS:Melodic
安装教程:Ubuntu18.04安装Ros
Orbbec Astra:环境搭建
教程:Ubuntu 20.04下搭建奥比中光-Astra (18.04版与20.04版步骤相同)
请在上述均搭建后在进行以下操作
一.安装依赖
sudo apt install ros-$ROS_DISTRO-rgbd-launch ros-$ROS_DISTRO-libuvc ros-$ROS_DISTRO-libuvc-camera ros-$ROS_DISTRO-libuvc-ros二. 配置工作空间
1.完成安装依赖文件后,需要新建一个工作空间用于对Astra相机的ROS开发(如果您没有工作区)
mkdir -p ~/catkin_ws/src
2.配置工作空间的环境变量
cd ~/catkin_ws/
catkin_make
source devel/setup.bash
(使用zsh终端的直接将bash换成zsh就可以了,下同)
如果这样设置环境变量,那么这个环境变量只对于此个终端有效,再打开一个终端是还需要再设置一下环境变量才行(暂时没解决)
3.检查环境变量是否生效
输入:
echo $ROS_PACKAGE_PATH输出:

三.下载功能包
cd ~/catkin_ws/src
git clone https://github.com/orbbec/ros_astra_camera如果没有“科学上网”的方法,git clone https://github.com/orbbec/ros_astra_camera 这一步可能无法执行,可以尝试在自己本机上进行下载,然后将下载的文件夹放置在~/catkin_ws/src下
四. 创建 astra udev 规则
roscd astra_camera
./scripts/create_udev_rules 
六.在工作区下进行编译astra_camera
cd ~/catkin_ws
catkin_make --pkg astra_camera
七.筛选器启用(不推荐:建议首先尝试主分支)
Astra 驱动程序提供正常和过滤方法。使用过滤器驱动程序,我们可以获得更精确的深度数据,但它会花费更多的计算资源。如果程序将在嵌入式系统上执行,我们建议使用普通方法。您可以使用如下方式更改方法。-DFILTER=ON / OFF
catkin_make --pkg astra_camera -DFILTER=OFF 
八.运行astra_camera
1.打开一个新终端,输入:roscore(不要关闭)
2. 回到原终端下(不要关闭)
①使用Astra
roslaunch astra_camera astra.launch②使用Astra Stereo S (w/ UVC)
roslaunch astra_camera stereo_s.launch
3.再打开一个新的终端(不要关闭)
在终端输入:rviz

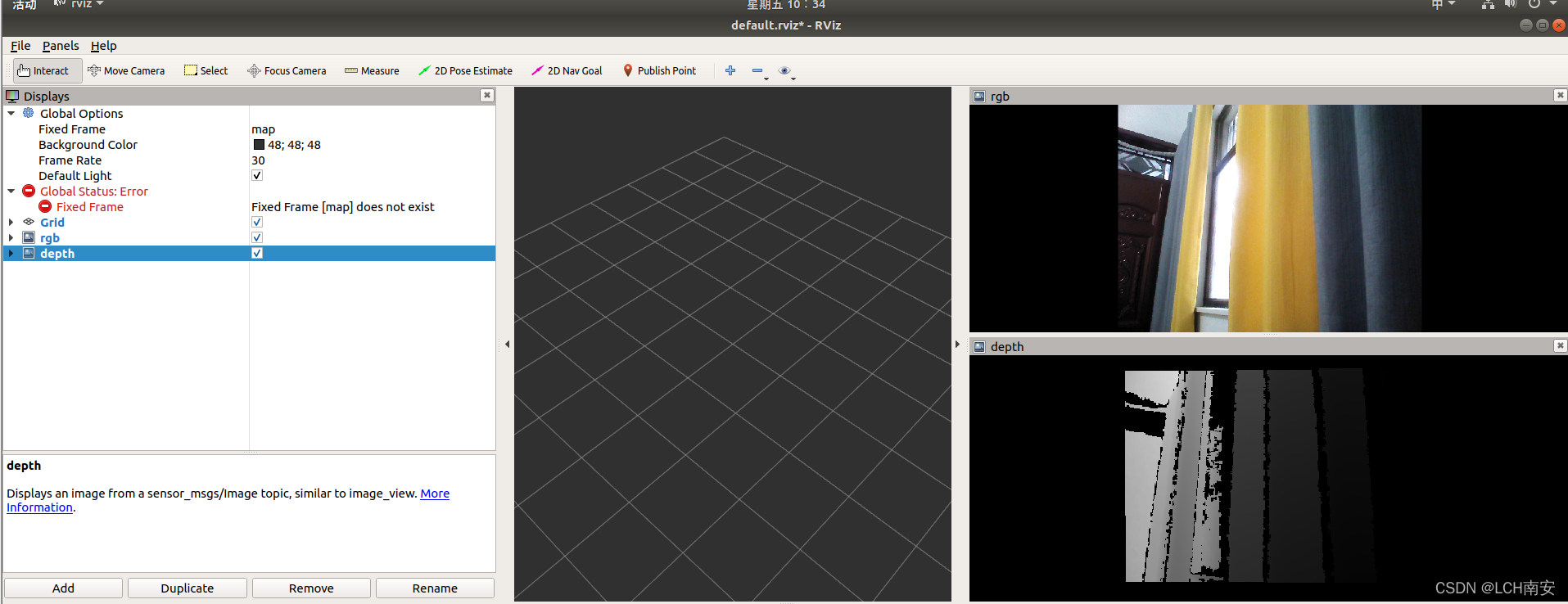
4.订阅节点
当前的rviz内尚未订阅任何节点,此时可以订阅查看图像信息。点击左下方Add按钮选择image类型,添加图像节点。

随后在左侧打开选项卡image,在image Topic中选择自己订阅的节点即可。
随后重复以上操作,选择不同的节点便可显示不同的图像
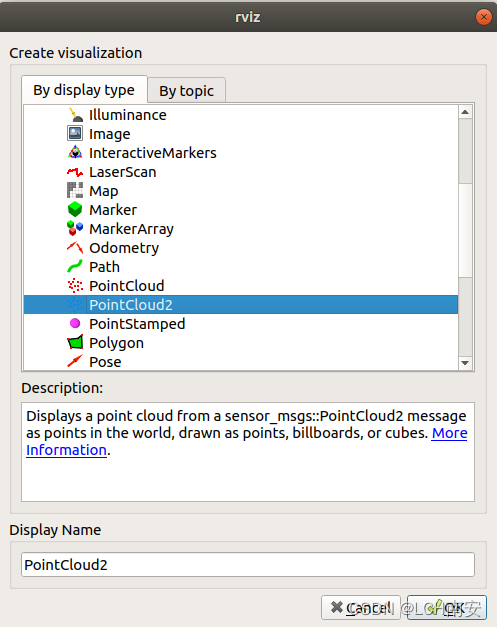
5.查看点云
再次点击左下方Add按钮,选择PointCloud2类型新建内容。
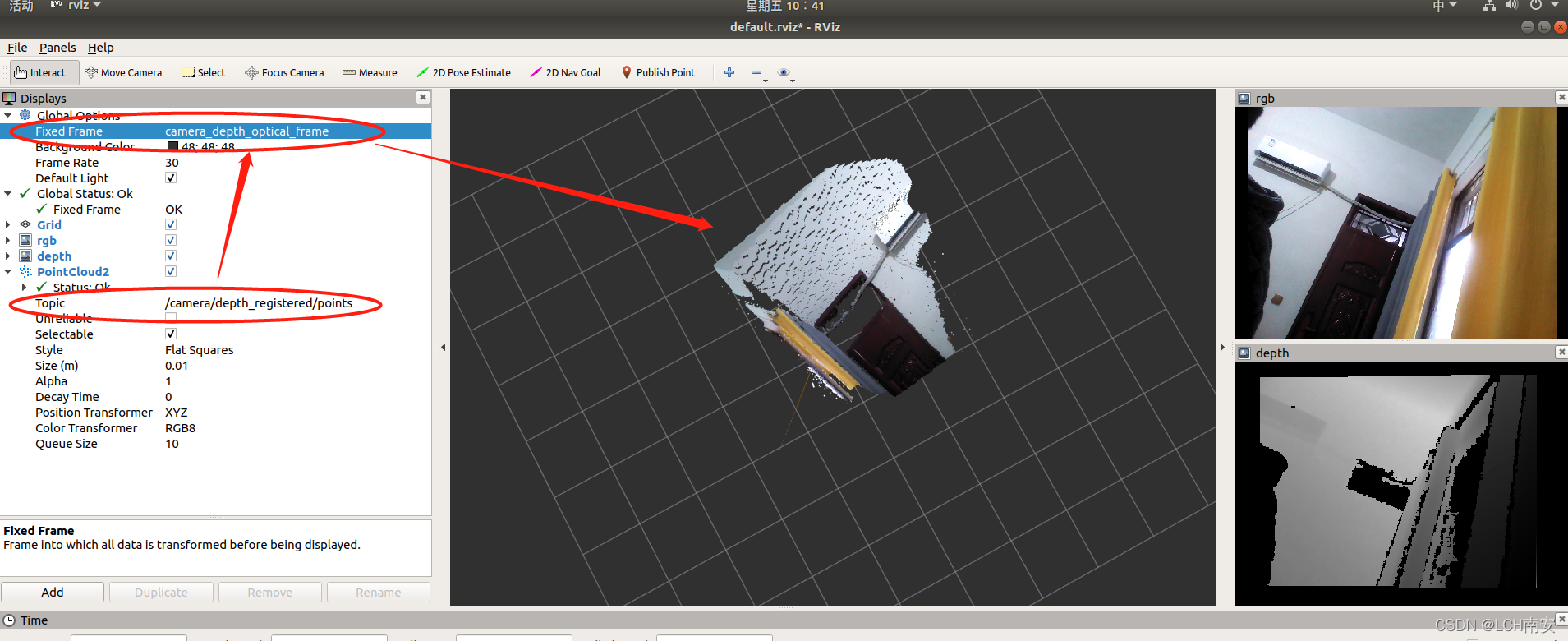
在左侧PointCloud2选项下订阅 /camera/depth_registered/points话题,并将Global Options下Fixed Frame选为camera_depth_optical_frame。完成上述操作后,即可在中央查看到点云选项。
结语:
由于Astra相机官方提供了ROS驱动进行开发,该驱动目前仅支持ROS Kinetic 和 Melodic版本,
而Ubuntu20.04对应的ROS版本为 Noetic,所以转战Ubuntu18.04。
希望这篇文章可以帮到大家。


















 1064
1064

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











