




错误:vmw_ioctl_command error 无效的参数
- 报错信息:

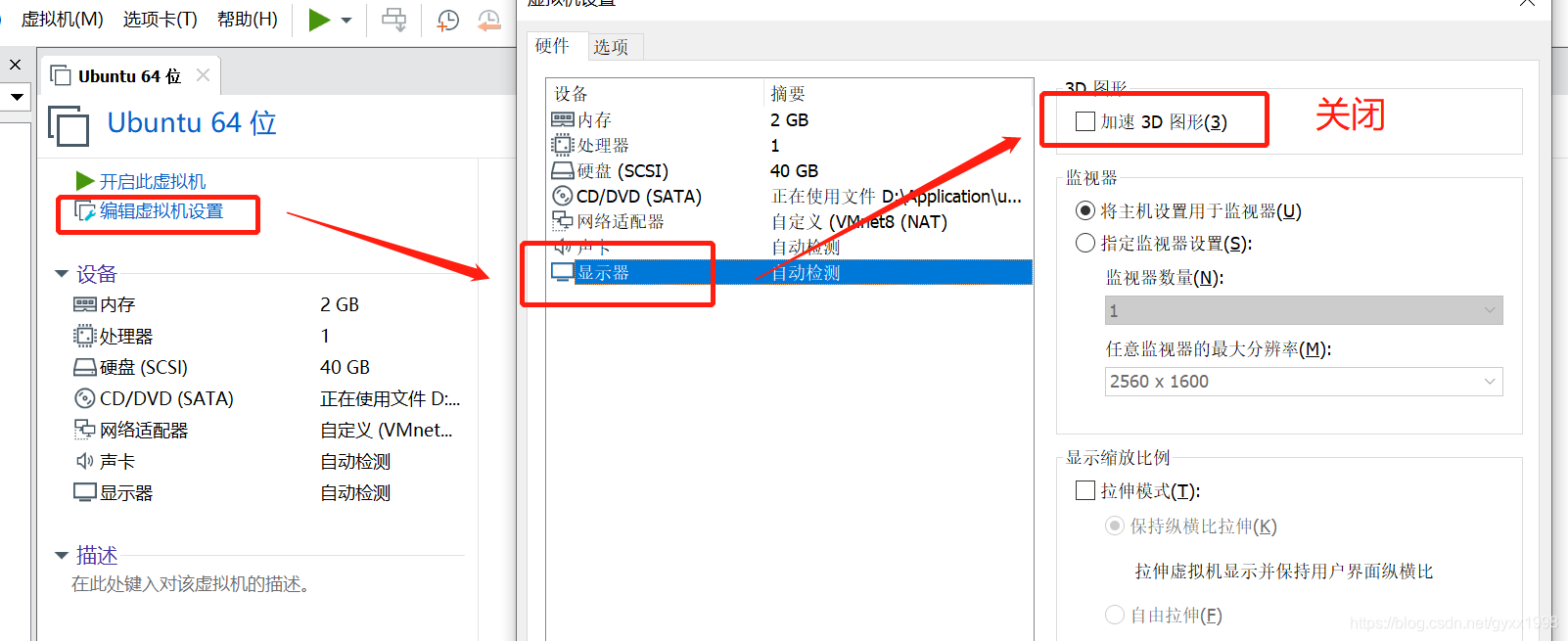
- 解决方法:
参考:https://miracle.blog.csdn.net/article/details/106978712
关闭3D加速功能
或者在系统内关闭硬件加速功能
echo " export SVGA_VGPU10=0" >> ~/.bashrc
source ~/.bashrc
参考:https://miracle.blog.csdn.net/article/details/106978712
关闭3D加速功能
或者在系统内关闭硬件加速功能
echo " export SVGA_VGPU10=0" >> ~/.bashrc
source ~/.bashrc
 5720
5720

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章






















