







01 什么是四元数
02 四元数与旋转矩阵、欧拉角
这里主要参考的是 右手系转左手系、旋转矩阵转四元数、四元数的两种表达(Hamilton/JPL)(这篇文章很棒,需要认真看哦~)
网上关于四元数有左手右手两种表达方式,有些地方标明了是在什么坐标系下的公式,而大多数地方是没有的。
所以如果“四元数转旋转矩阵”和“旋转矩阵转四元数”分别采用了在不同坐标系下的转换公式,将会出错。
在右手、左手坐标系下建立的四元数表示方式分别叫做四元数的两种表达:Hamilton/JPL
这两种表达的区别如下:

Hamilton对应右手系,JPL对应左手系
定义的差异直接导致计算公式的不同,但实际应用中只要统一标准应该问题不大。
Eigen ,Matlab ,ROS、Google Ceres Solver等都使用Hamilton四元数,而JPL则多用于航空航天领域。
2.1 公式(四元数与旋转矩阵)
Hamilton和JPL这两种表达,基本上就是相差一个符号的正负
2.1.1 四元数转旋转矩阵
Hamilton表达:

JPL表达:

2.1.1 旋转矩阵转四元数
Hamilton表达:
r 11 r11 r11等为姿态旋转矩阵中的元素

JPL表达:

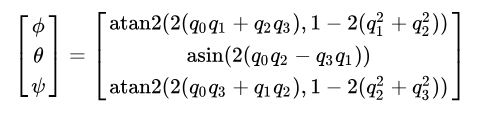
2.2 公式(四元数与欧拉角)
在这里使用的是Hamilton(右手系)的
03 编程
3.1 c++
3.1.1 Hamilton表达
- 四元数转旋转矩阵
void getRotation(double *Quaternion, double *rt_mat)
{
rt_mat[0] = 1 - 2 * (Quaternion[2] * Quaternion[2]) - 2 * (Quaternion[3] * Quaternion[3]);
rt_mat[1] = 2 * Quaternion[1] * Quaternion[2] - 2 * Quaternion[0] * Quaternion[3];
rt_mat[2] = 2 * Quaternion[1] * Quaternion[3] + 2 * Quaternion[0] * Quaternion[2];
rt_mat[3] = 2 * Quaternion[1] * Quaternion[2] + 2 * Quaternion[0] * Quaternion[3];
rt_mat[4] = 1 - 2 * (Quaternion[1] * Quaternion[1]) - 2 * (Quaternion[3] * Quaternion[3]);
rt_mat[5] = 2 * Quaternion[2] * Quaternion[3] - 2 * Quaternion[0] * Quaternion[1];
rt_mat[6] = 2 * Quaternion[1] * Quaternion[3] - 2 * Quaternion[0] * Quaternion[2];
rt_mat[7] = 2 * Quaternion[2] * Quaternion[3] + 2 * Quaternion[0] * Quaternion[1];
rt_mat[8] = 1 - 2 * (Quaternion[1] * Quaternion[1]) - 2 * (Quaternion[2] * Quaternion[2]);
}
- 旋转矩阵转四元数
void getQuaternion(Mat R, double Q[])
{
double trace = R.at<double>(0,0) + R.at<double>(1,1) + R.at<double>(2,2);
if (trace > 0.0)
{
double s = sqrt(trace + 1.0);
Q[3] = (s * 0.5);
s = 0.5 / s;
Q[0] = ((R.at<double>(2,1) - R.at<double>(1,2)) * s);
Q[1] = ((R.at<double>(0,2) - R.at<double>(2,0)) * s);
Q[2] = ((R.at<double>(1,0) - R.at<double>(0,1)) * s);
}
else
{
int i = R.at<double>(0,0) < R.at<double>(1,1) ? (R.at<double>(1,1) < R.at<double>(2,2) ? 2 : 1) : (R.at<double>(0,0) < R.at<double>(2,2) ? 2 : 0);
int j = (i + 1) % 3;
int k = (i + 2) % 3;
double s = sqrt(R.at<double>(i, i) - R.at<double>(j,j) - R.at<double>(k,k) + 1.0);
Q[i] = s * 0.5;
s = 0.5 / s;
Q[3] = (R.at<double>(k,j) - R.at<double>(j,k)) * s;
Q[j] = (R.at<double>(j,i) + R.at<double>(i,j)) * s;
Q[k] = (R.at<double>(k,i) + R.at<double>(i,k)) * s;
}
}
3.1.1 JPL表达
参考:从旋转矩阵到四元数
- 旋转矩阵转四元数
void getQuaternion(cv::Mat R, double Q[])//JPL
{
double m11=R.at<double>(0,0), m12 = R.at<double>(0, 1), m13 = R.at<double>(0, 2);
double m21 = R.at<double>(1, 0), m22 = R.at<double>(1, 1), m23 = R.at<double>(1, 2);
double m31 = R.at<double>(2, 0), m32 = R.at<double>(2, 1), m33 = R.at<double>(2, 2);
double w, x, y, z;
//探测四元数中最大的项
double fourWSquaredMinusl = m11 + m22 + m33;
double fourXSquaredMinusl = m11 - m22 - m33;
double fourYSquaredMinusl = m22 - m11 - m33;
double fourZSquaredMinusl = m33 - m11 - m22;
int biggestIndex = 0;
double fourBiggestSqureMinus1 = fourWSquaredMinusl;
if (fourXSquaredMinusl > fourBiggestSqureMinus1) {
fourBiggestSqureMinus1 = fourXSquaredMinusl;
biggestIndex = 1;
}
if (fourYSquaredMinusl > fourBiggestSqureMinus1) {
fourBiggestSqureMinus1 = fourYSquaredMinusl;
biggestIndex = 2;
}
if (fourZSquaredMinusl > fourBiggestSqureMinus1) {
fourBiggestSqureMinus1 = fourZSquaredMinusl;
biggestIndex = 3;
}
//计算平方根和除法
double biggestVal = sqrt(fourBiggestSqureMinus1 + 1.0f) * 0.5f;
double mult = 0.25f / biggestVal;
//计算四元数的值
switch (biggestIndex) {
case 0:
w = biggestVal;
x = (m23 - m32) * mult;
y = (m31 - m13) * mult;
z = (m12 - m21) * mult;
break;
case 1:
x = biggestVal;
w = (m23 - m32) * mult;
y = (m12 + m21) * mult;
z = (m31 + m13) * mult;
break;
case 2:
y = biggestVal;
w = (m31 - m13) * mult;
x = (m12 + m21) * mult;
z = (m23 + m32) * mult;
break;
case 3:
z = biggestVal;
w = (m12 - m21) * mult;
x = (m31 + m13) * mult;
y = (m23 + m32) * mult;
break;
}
Q[0] = x;
Q[1] = y;
Q[2] = z;
Q[3] = w;
}
3.2 matlab
3.2.1 Hamilton表达
- 四元数转旋转矩阵
function r=q2rot(q)
% q是从控制器或示教器中读取的向量[q1 q2 q3 q4];
w=q(1);
x=q(2);
y=q(3);
z=q(4);
r=zeros(3,3);
r(1,1)=1-2*y*y-2*z*z;
r(1,2)=2*x*y+2*w*z;
r(1,3)=2*x*z-2*w*y;
r(2,1)=2*x*y-2*w*z;
r(2,2)=1-2*x*x-2*z*z;
r(2,3)=2*z*y+2*w*x;
r(3,1)=2*x*z+2*w*y;
r(3,2)=2*y*z-2*w*x;
r(3,3)=1-2*x*x-2*y*y;
r=r';
end
- 欧拉角转旋转矩阵
function H = Eular2Rot( EX,EY,EZ,TransVector )
% EX,EY,EZ,TransVector是机器手坐标系(或工具坐标系)在基坐标系(世界坐标系或者工件坐标系也可)里面的位置和姿态变换参数,需要从机器人控制器或示教盒中读取
% EX--机器手坐标系绕基坐标系的X轴旋转欧拉角
% EY--绕Y轴旋转欧拉角
% EZ--绕Z轴旋转欧拉角
% TransVector--机器手坐标系原点相对基坐标系的平移向量:3x1
a=EX/180 *pi;
b=EY/180 *pi;
r=EZ/180 *pi;
Rx=[1 0 0;0 cos(a) -sin(a);0 sin(a) cos(a)];
Ry=[cos(b) 0 sin(b);0 1 0;-sin(b) 0 cos(b)];
Rz=[cos(r) -sin(r) 0;sin(r) cos(r) 0;0 0 1];
R=Rz*Ry*Rx;
H=[R TransVector;0 0 0 1];
end
3.3 python
3.3.1 Hamilton表达和JPL表达
from math import pi, sqrt
import numpy as np
# 注:Hamilton为右手系
# JPL 为左手系
def quat_to_pos_matrix_hm(p_x, p_y, p_z, x, y, z, w):
# 创建位姿矩阵,写入位置
T = np.matrix([[0, 0, 0, p_x], [0, 0, 0, p_y], [0, 0, 0, p_z], [0, 0, 0, 1]])
T[0, 0] = 1 - 2 * pow(y, 2) - 2 * pow(z, 2)
T[0, 1] = 2 * (x * y - w * z)
T[0, 2] = 2 * (x * z + w * y)
T[1, 0] = 2 * (x * y + w * z)
T[1, 1] = 1 - 2 * pow(x, 2) - 2 * pow(z, 2)
T[1, 2] = 2 * (y * z - w * x)
T[2, 0] = 2 * (x * z - w * y)
T[2, 1] = 2 * (y * z + w * x)
T[2, 2] = 1 - 2 * pow(x, 2) - 2 * pow(y, 2)
return T
# return T.tolist()
def quat_to_pos_matrix_JPL(p_x, p_y, p_z, x, y, z, w):
# 创建位姿矩阵,写入位置
T = np.matrix([[0, 0, 0, p_x], [0, 0, 0, p_y], [0, 0, 0, p_z], [0, 0, 0, 1]])
T[0, 0] = 1 - 2 * pow(y, 2) - 2 * pow(z, 2)
T[0, 1] = 2 * (x * y + w * z)
T[0, 2] = 2 * (x * z - w * y)
T[1, 0] = 2 * (x * y - w * z)
T[1, 1] = 1 - 2 * pow(x, 2) - 2 * pow(z, 2)
T[1, 2] = 2 * (y * z + w * x)
T[2, 0] = 2 * (x * z + w * y)
T[2, 1] = 2 * (y * z - w * x)
T[2, 2] = 1 - 2 * pow(x, 2) - 2 * pow(y, 2)
return T
# return T.tolist()
def pos_matrix_to_quat_hm(T):
r11 = T[0, 0]
r12 = T[0, 1]
r13 = T[0, 2]
r21 = T[1, 0]
r22 = T[1, 1]
r23 = T[1, 2]
r31 = T[2, 0]
r32 = T[2, 1]
r33 = T[2, 2]
w = (1 / 2) * sqrt(1 + r11 + r22 + r33)
x = (r32 - r23) / (4 * w)
y = (r13 - r31) / (4 * w)
z = (r21 - r12) / (4 * w)
return x, y, z, w
def pos_matrix_to_quat_JPL(T):
r11 = T[0, 0]
r12 = T[0, 1]
r13 = T[0, 2]
r21 = T[1, 0]
r22 = T[1, 1]
r23 = T[1, 2]
r31 = T[2, 0]
r32 = T[2, 1]
r33 = T[2, 2]
w = (1 / 2) * sqrt(1 + r11 + r22 + r33)
x = (r23 - r32) / (4 * w)
y = (r31 - r13) / (4 * w)
z = (r12 - r21) / (4 * w)
return x, y, z, w
if __name__ == "__main__":
# position:
p_x = 0.0
p_y = 0.0881141967773
p_z = -0.0655107116699
# orientation:
x = -0.181168104759
y = -0.0779586342595
z = -0.385540513457
w = 0.901365121161
T_hm = quat_to_pos_matrix_hm(p_x, p_y, p_z, x, y, z, w)
print("T_hm")
print(T_hm)
T_JPL = quat_to_pos_matrix_JPL(p_x, p_y, p_z, x, y, z, w)
print("T_JPL")
print(T_JPL)
x, y, z, w = pos_matrix_to_quat_hm(T_hm,)
print("q_hm")
print(x, y, z, w)
x, y, z, w = pos_matrix_to_quat_JPL(T_JPL)
print("q_JPL")
print(x, y, z, w)
TT1 = np.matrix([[0.6906, 0.7233, -0.0008, p_x], [-0.6668, 0.6371, 0.3867, p_y], [0.2802, -0.2665, 0.9222, p_z], [0, 0, 0, 1]])
x, y, z, w = pos_matrix_to_quat_hm(TT1)
print("q")
print(x, y, z, w)
3.3.2 python的一些语法
3.3.2.1 ptyhon计算平方
方法一:使用内置模块
>>> import math
>>> math.pow(12, 2) # 求平方
144.0
方法二:使用表达式
>>> 12 ** 2 # 求平方
144
方法三:使用内置函数
>>> pow(12, 2) # 求平方
144
3.3.2.2 ptyhon计算平方根
方法一:
num_sqrt = num ** 0.5
方法二:
import cmath
num_sqrt = cmath.sqrt(num)
3.3.2.3 矩阵定义和访问 & 矩阵和列表的转换
import numpy as np
# 定义
T = np.matrix([[1,0,0,0],[0,1,-1,0],[0,1,1,0],[0,0,0,1]])
# 访问
a = T[0, 0]
# 转为list
T2 = T.tolist()
# 转为list的访问
a = T[0][0]
注意:
矩阵的访问是T[0, 0]
把矩阵转为list的访问是T[0][0]
矩阵转换为列表 L=M.tolist()
列表转换为矩阵 M=mat(L)
矩阵、数组、列表的两两转换参考:https://blog.csdn.net/m0_37477175/article/details/72828311
04 有关四元数和旋转矩阵相互转换的一些参考
- 三维旋转:欧拉角、四元数、旋转矩阵、轴角之间的转换
https://zhuanlan.zhihu.com/p/45404840 - 机器人学习之旋转矩阵与四元数之间的转换关系
https://blog.csdn.net/ren18281713749/article/details/103814787 - 姿态解算3-四元数与旋转矩阵
https://zhuanlan.zhihu.com/p/22596921 - 0034: 四元数与姿态矩阵(旋转矩阵)转换的公式
http://blog.sciencenet.cn/blog-2777453-1075307.html - 左手系情况:从四元数到旋转矩阵
https://blog.csdn.net/loongkingwhat/article/details/88427828
四元数 q = s + x i + y j + z k q=s+xi+yj+zk q=s+xi+yj+zk
构造纯四元数后(即 p ′ = q p q − 1 p' = q p q^{-1} p′=qpq−1)

或


















 852
852

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









