







目录
前言
滤波初始化会严重影响到初始时刻的跟踪精度,因此只有初始化进行好了,才可以利用卡尔曼滤波对目标进行跟踪。本文针对四维、六维及九维条件下的卡尔曼滤波进行了初始化,对应的原理以及代码如文中所示。(后续代码会在资源中上传)
一、四维状态变量滤波初始化
(一)基础知识
目标状态向量定义为,对应的量测函数如下:
此时在时刻进行滤波的初始化,对应状态向量如下:
对应的时刻的协方差矩阵计算如下:
其中,为量测协方差矩阵。对应仿真代码如下:
n_sim = 50; %仿真时间
Ts = 1; %仿真时间间隔
nz = 2; %量测维数
x_start = [10 2 30,-1]'; %目标初始时刻状态
nf = 0.001;
np = 2; %每一位的状态变量数:CV为2;CA为3
nd = 2; %空间维数:二维or三维
nx = np*nd; %状态维数
RMSE = zeros(n_sim,1);
Montrkalo = 100;
RMSE_sum = 0;
for k = 1:Montrkalo
%目标真实轨迹及其量测
[F,Q]= state_tran(Ts,nd,nf,np);
x_real = zeros(nx,n_sim);
x_real(:,1) = x_start;
for i = 2:n_sim
x_real(:,i) = F*x_real(:,i-1) + Q*randn(nx,1);
end
z_real = zeros(nz,n_sim);
R = diag([4,0.0001]);
for i = 1:n_sim
z_real(:,i) = h_calculate(x_real(:,i),np,nd)+R*randn(nz,1);
end
%滤波初始化
x_filter = zeros(nx,n_sim);
P = cell(n_sim,1);
P(:) = {zeros(nx,nx)};
n_initial = 2; %开始时刻
rou_initial_1 = z_real(1,n_initial-1);
theat_initial_1 = z_real(2,n_initial-1);
x_initial_1 = rou_initial_1*cos(theat_initial_1);%量测转换得到的
y_initial_1 = rou_initial_1*sin(theat_initial_1);
rou_initial = z_real(1,n_initial);
theat_initial = z_real(2,n_initial);
x_initial = rou_initial*cos(theat_initial); %量测转换得到的
y_initial = rou_initial*sin(theat_initial);
x_filter(:,n_initial) = [x_initial,(x_initial-x_initial_1)/Ts,y_initial,(y_initial-y_initial_1)/Ts]';
RMSE(n_initial) = sqrt((x_filter(1,n_initial)-x_real(1,n_initial))^2 + (x_filter(3,n_initial)-x_real(3,n_initial))^2);
A = [cos(theat_initial),-rou_initial*sin(theat_initial);sin(theat_initial),rou_initial*cos(theat_initial)];
R_trans_initial = A*R*A';
P{n_initial} = [R_trans_initial(1,1), R_trans_initial(1,1)/Ts, R_trans_initial(1,2), R_trans_initial(1,2)/Ts;
R_trans_initial(1,1)/Ts, 2*R_trans_initial(1,1)/(Ts^2), R_trans_initial(1,2)/Ts, 2*R_trans_initial(1,2)/(Ts^2);
R_trans_initial(1,2), R_trans_initial(1,2)/Ts, R_trans_initial(2,2), R_trans_initial(2,2)/Ts;
R_trans_initial(1,2)/Ts, 2*R_trans_initial(1,2)/(Ts^2), R_trans_initial(2,2)/Ts, 2*R_trans_initial(2,2)/(Ts^2) ];
for i = n_initial+1:n_sim
[x_filter(:,i),P{i}] = UKF(x_filter(:,i-1),z_real(:,i),P{i-1},R,F,Q,np,nd);
RMSE(i) = sqrt((x_filter(1,i)-x_real(1,i))^2 + (x_filter(3,i)-x_real(3,i))^2);
end
RMSE_sum = RMSE_sum+RMSE;
end
RMSE_final = RMSE_sum/Montrkalo;
figure;
plot(x_filter(1,n_initial:end),x_filter(3,n_initial:end),'r',LineWidth=1);
hold on;
plot(x_real(1,:),x_real(3,:),'b--',LineWidth=1);
xlabel('x');
ylabel('y');
legend("滤波轨迹","真实轨迹")
figure;
plot(n_initial:n_sim,RMSE_final(n_initial:end),'b--',LineWidth=1);
xlabel('RMSE');
ylabel('Time');(二)仿真结果
对应的目标运动轨迹及RMSE计算如下:
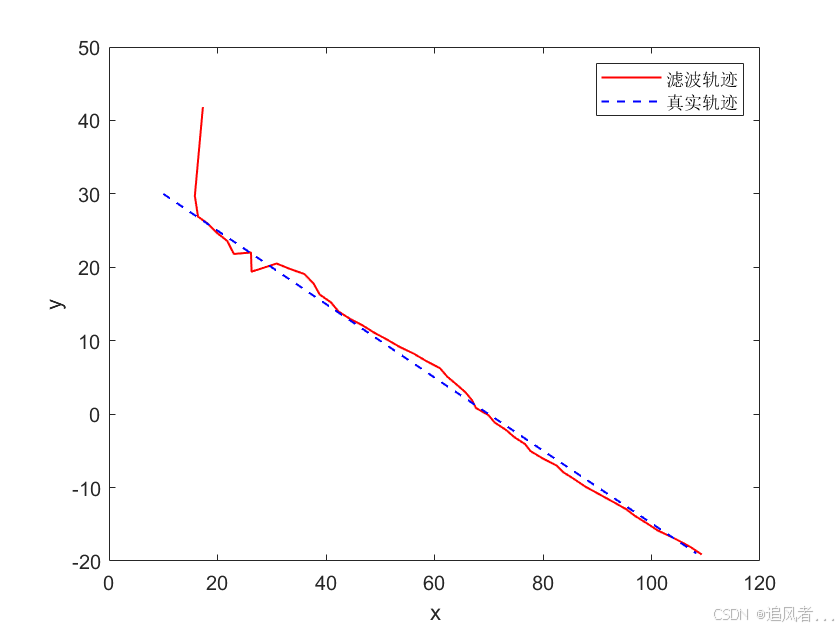
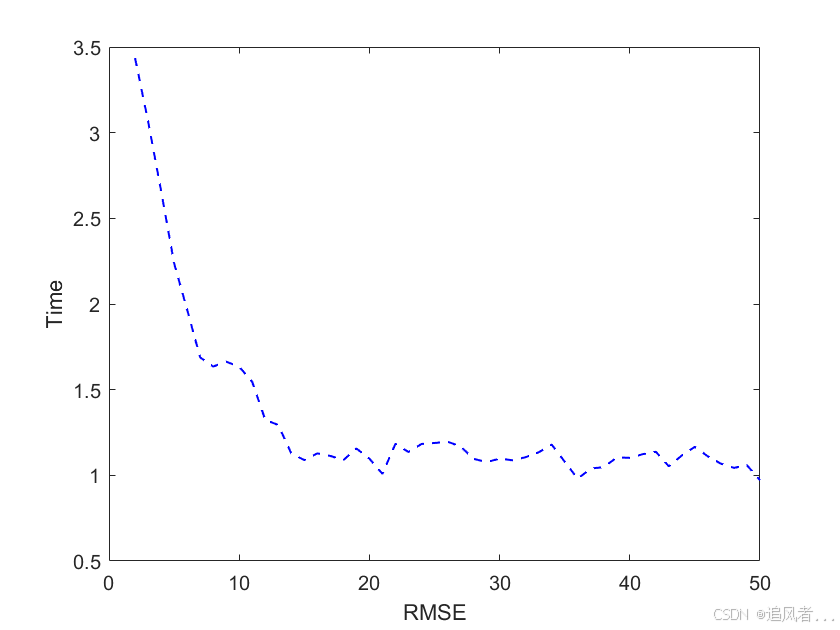
从仿真结果中可以看出,对应的滤波器能够实现较好的初始化,目标跟踪精度不断提升,说明了初始化的有效性。
二、六维状态变量滤波初始化
(一)基础知识
目标状态向量定义为,对应的量测函数如下:
此时在时刻进行滤波的初始化,对应状态向量如下:
对应的时刻的协方差矩阵计算如下:
其中,为量测协方差矩阵。对应仿真代码如下:
n_sim = 50; %仿真时间
Ts = 1; %仿真时间间隔
nz = 3; %量测维数
x_start = [10, 2, 30, -1, 50, 2]'; %目标初始时刻状态
nf = 0.001;
np = 2; %每一位的状态变量数:CV为2;CA为3
nd = 3; %空间维数:二维or三维
nx = np*nd; %状态维数
RMSE = zeros(n_sim,1);
Montrkalo = 100;
RMSE_sum = 0;
for k = 1:Montrkalo
%目标真实轨迹及其量测
[F,Q]= state_tran(Ts,nd,nf,np);
x_real = zeros(nx,n_sim);
x_real(:,1) = x_start;
for i = 2:n_sim
x_real(:,i) = F*x_real(:,i-1) + Q*randn(nx,1);
end
z_real = zeros(nz,n_sim);
R = diag([4,0.0001,0.0001]);
for i = 1:n_sim
z_real(:,i) = h_calculate(x_real(:,i),np,nd)+R*randn(nz,1);
end
%滤波初始化
x_filter = zeros(nx,n_sim);
P = cell(n_sim,1);
P(:) = {zeros(nx,nx)};
n_initial = 2; %开始时刻
rou_initial_1 = z_real(1,n_initial-1);
theat_initial_1 = z_real(2,n_initial-1);
epsion_initial_1 = z_real(3,n_initial-1);
x_initial_1 = rou_initial_1*cos(theat_initial_1)*cos(epsion_initial_1);%量测转换得到的
y_initial_1 = rou_initial_1*sin(theat_initial_1)*cos(epsion_initial_1);
z_initial_1 = rou_initial_1*sin(epsion_initial_1);
rou_initial = z_real(1,n_initial);
theat_initial = z_real(2,n_initial);
epsion_initial = z_real(3,n_initial);
x_initial = rou_initial*cos(theat_initial)*cos(epsion_initial); %量测转换得到的
y_initial = rou_initial*sin(theat_initial)*cos(epsion_initial);
z_initial = rou_initial*sin(epsion_initial);
x_filter(:,n_initial) = [x_initial,(x_initial-x_initial_1)/Ts,y_initial,(y_initial-y_initial_1)/Ts,z_initial,(z_initial-z_initial_1)/Ts]';
RMSE(n_initial) = sqrt((x_filter(1,n_initial)-x_real(1,n_initial))^2 + (x_filter(3,n_initial)-x_real(3,n_initial))^2+(x_filter(5,n_initial)-x_real(5,n_initial))^2);
A = [cos(theat_initial)*cos(epsion_initial),-rou_initial*sin(theat_initial)*cos(epsion_initial),-rou_initial*cos(theat_initial)*sin(epsion_initial);
sin(theat_initial)*cos(epsion_initial),rou_initial*cos(theat_initial)*cos(epsion_initial),-rou_initial*sin(theat_initial)*sin(epsion_initial);
sin(epsion_initial), 0 , rou_initial*cos(theat_initial)];
R_trans_initial = A*R*A';
R11 = [R_trans_initial(1,1), R_trans_initial(1,1)/Ts;
R_trans_initial(1,1)/Ts, 2*R_trans_initial(1,1)/(Ts^2)];
R12 = [R_trans_initial(1,2), R_trans_initial(1,2)/Ts;
R_trans_initial(1,2)/Ts, 2*R_trans_initial(1,2)/(Ts^2)];
R13 = [R_trans_initial(1,3), R_trans_initial(1,3)/Ts;
R_trans_initial(1,3)/Ts, 2*R_trans_initial(1,3)/(Ts^2)];
R23 = [R_trans_initial(2,3), R_trans_initial(2,3)/Ts;
R_trans_initial(2,3)/Ts, 2*R_trans_initial(2,3)/(Ts^2)];
R22 = [R_trans_initial(2,2), R_trans_initial(2,2)/Ts;
R_trans_initial(2,2)/Ts, 2*R_trans_initial(2,2)/(Ts^2)];
R33 = [R_trans_initial(3,3), R_trans_initial(3,3)/Ts;
R_trans_initial(3,3)/Ts, 2*R_trans_initial(3,3)/(Ts^2)];
P{n_initial} = [R11, R12, R13;
R12, R22, R23;
R13, R23, R33];
for i = n_initial+1:n_sim
[x_filter(:,i),P{i}] = UKF(x_filter(:,i-1),z_real(:,i),P{i-1},R,F,Q,np,nd);
RMSE(i) = sqrt((x_filter(1,i)-x_real(1,i))^2 + (x_filter(3,i)-x_real(3,i))^2 + (x_filter(5,i)-x_real(5,i))^2);
end
RMSE_sum = RMSE_sum+RMSE;
end
RMSE_final = RMSE_sum/Montrkalo;
figure;
plot3(x_filter(1,n_initial:end),x_filter(3,n_initial:end),x_filter(5,n_initial:end),'r',LineWidth=1);
hold on;
plot3(x_real(1,:),x_real(3,:),x_real(5,:),'b--',LineWidth=1);
xlabel('x');
ylabel('y');
zlabel('z');
legend("滤波轨迹","真实轨迹")
figure;
plot(n_initial:n_sim,RMSE_final(n_initial:end),'b--',LineWidth=1);
xlabel('RMSE');
ylabel('Time');(二)仿真结果
对应的目标运动轨迹及RMSE计算如下:
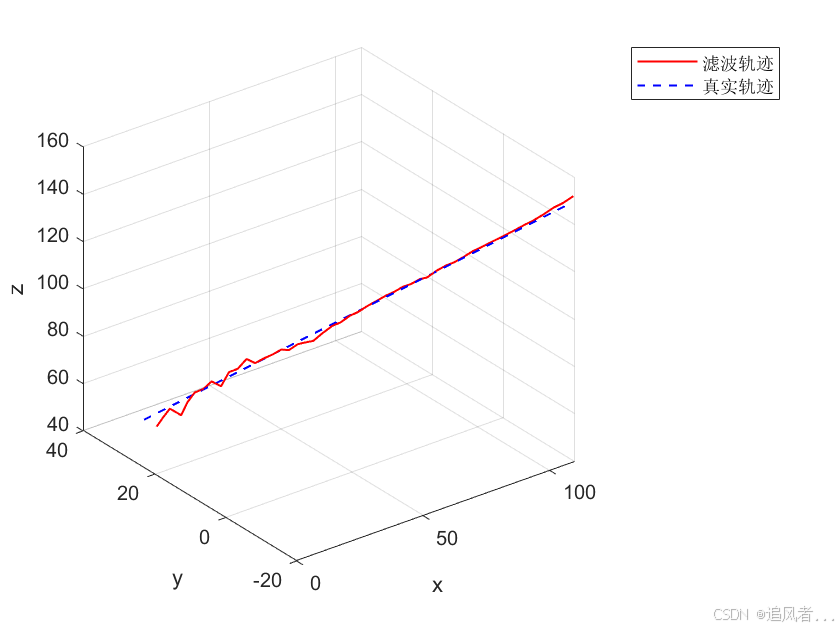
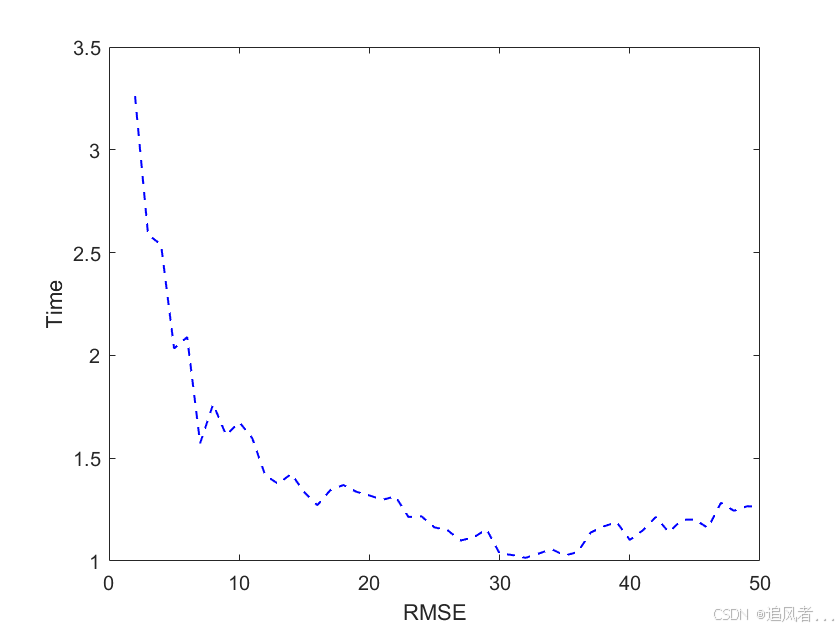
从仿真结果中可以看出,对应的滤波器能够实现较好的初始化,目标跟踪精度不断提升,说明了初始化的有效性。
三、九维状态变量滤波初始化
(一)基础知识
目标状态向量定义为,对应的量测函数如下:
此时在时刻进行滤波的初始化,对应状态向量如下:
对应的时刻的协方差矩阵计算如下:
其中,为量测协方差矩阵。
为分块矩阵,对应计算公式如下:
其中,。对应仿真代码如下:
n_sim = 100; %仿真时间
Ts = 1; %仿真时间间隔
nz = 3; %量测维数
x_start = [10, 2, 0, 30, -1, 0, 50, 2, 0]'; %目标初始时刻状态
nf = 0.001;
np = 3; %每一位的状态变量数:CV为2;CA为3
nd = 3; %空间维数:二维or三维
nx = np*nd; %状态维数
RMSE = zeros(n_sim,1);
Montrkalo = 100;
RMSE_sum = 0;
for k = 1:Montrkalo
%目标真实轨迹及其量测
[F,Q]= state_tran(Ts,nd,nf,np);
x_real = zeros(nx,n_sim);
x_real(:,1) = x_start;
for i = 2:n_sim
x_real(:,i) = F*x_real(:,i-1) + Q*randn(nx,1);
end
z_real = zeros(nz,n_sim);
R = diag([1,0.0000001,0.0000001]);
for i = 1:n_sim
z_real(:,i) = h_calculate(x_real(:,i),np,nd)+R*randn(nz,1);
end
%滤波初始化
x_filter = zeros(nx,n_sim);
P = cell(n_sim,1);
P(:) = {zeros(nx,nx)};
n_initial = 3; %开始时刻
rou = zeros(n_initial,1); theat = zeros(n_initial,1); epsion = zeros(n_initial,1);
x = zeros(n_initial,1); y = zeros(n_initial,1); z = zeros(n_initial,1);
R_trans = cell(n_initial,1);
R_trans(:) = {zeros(nz,nz)};
for i =1:n_initial
rou(i) = z_real(1,i);
theat(i) = z_real(2,i);
epsion(i) = z_real(3,i);
x(i) = rou(i)*cos(theat(i))*cos(epsion(i));%量测转换得到的
y(i) = rou(i)*sin(theat(i))*cos(epsion(i));
z(i) = rou(i)*sin(epsion(i));
A = [cos(theat(i))*cos(epsion(i)),-rou(i)*sin(theat(i))*cos(epsion(i)),-rou(i)*cos(theat(i))*sin(epsion(i));
sin(theat(i))*cos(epsion(i)),rou(i)*cos(theat(i))*cos(epsion(i)),-rou(i)*sin(theat(i))*sin(epsion(i));
sin(epsion(i)), 0 , rou(i)*cos(theat(i))];
R_trans{i} = A*R*A';
end
x_filter(:,n_initial) = [x(n_initial),(x(n_initial)-x(n_initial-1))/Ts,((x(n_initial)-x(n_initial-1))/Ts-(x(n_initial)-x(n_initial-1))/Ts)/Ts,...
y(n_initial),(y(n_initial)-y(n_initial-1))/Ts,((y(n_initial)-y(n_initial-1))/Ts-(y(n_initial)-y(n_initial-1))/Ts)/Ts,...
z(n_initial),(z(n_initial)-z(n_initial-1))/Ts,((z(n_initial)-z(n_initial-1))/Ts-(z(n_initial)-z(n_initial-1))/Ts)/Ts]';
RMSE(n_initial) = sqrt((x_filter(1,n_initial)-x_real(1,n_initial))^2 + (x_filter(4,n_initial)-x_real(4,n_initial))^2+(x_filter(7,n_initial)-x_real(7,n_initial))^2);
P_initial = cell(n_initial,n_initial);
P_initial(:) = {zeros(nz,nz)};
for i = 1:n_initial
for j = 1:n_initial
P_initial{i,j} = [R_trans{3}(i,j), R_trans{3}(i,j)/Ts, R_trans{3}(i,j)/(Ts^2);
R_trans{3}(i,j)/Ts, (R_trans{3}(i,j)+R_trans{2}(i,j))/(Ts^2), (R_trans{3}(i,j)+2*R_trans{2}(i,j))/(Ts^3);
R_trans{3}(i,j)/(Ts^2), (R_trans{3}(i,j)+2*R_trans{2}(i,j))/(Ts^3), (R_trans{3}(i,j)+4*R_trans{2}(i,j)+R_trans{1}(i,j))/(Ts^4) ];
end
end
P{n_initial} = cell2mat(P_initial);
for i = n_initial+1:n_sim
[x_filter(:,i),P{i}] = UKF(x_filter(:,i-1),z_real(:,i),P{i-1},R,F,Q,np,nd);
RMSE(i) = sqrt((x_filter(1,i)-x_real(1,i))^2 + (x_filter(4,i)-x_real(4,i))^2 + (x_filter(7,i)-x_real(7,i))^2);
end
RMSE_sum = RMSE_sum+RMSE;
end
RMSE_final = RMSE_sum/Montrkalo;
figure;
plot3(x_filter(1,n_initial:end),x_filter(4,n_initial:end),x_filter(7,n_initial:end),'r',LineWidth=1);
hold on;
grid on;
plot3(x_real(1,:),x_real(4,:),x_real(7,:),'b--',LineWidth=1);
xlabel('x');
ylabel('y');
zlabel('z');
legend("滤波轨迹","真实轨迹")
figure;
plot(n_initial:n_sim,RMSE_final(n_initial:end),'b--',LineWidth=1);
xlabel('RMSE');
ylabel('Time');(二)仿真结果
对应的目标运动轨迹及RMSE计算如下:
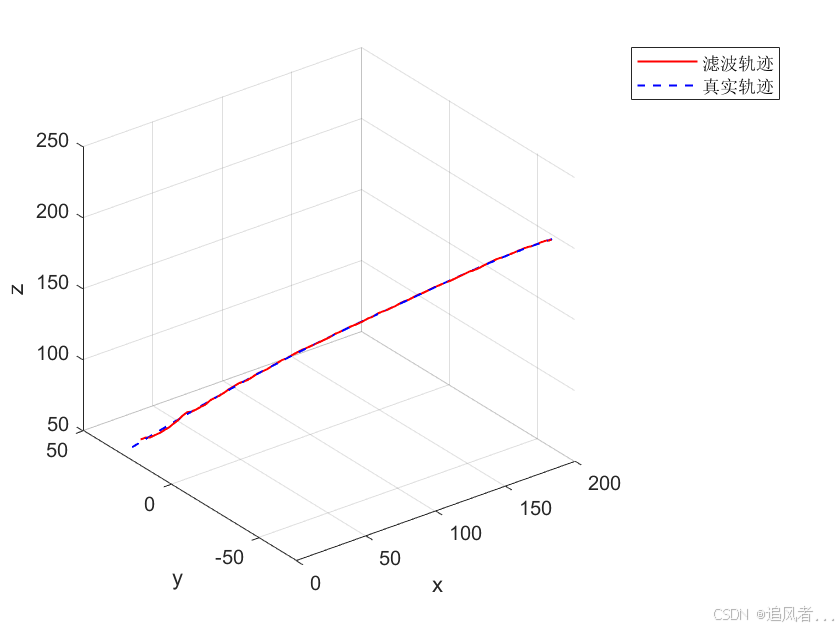
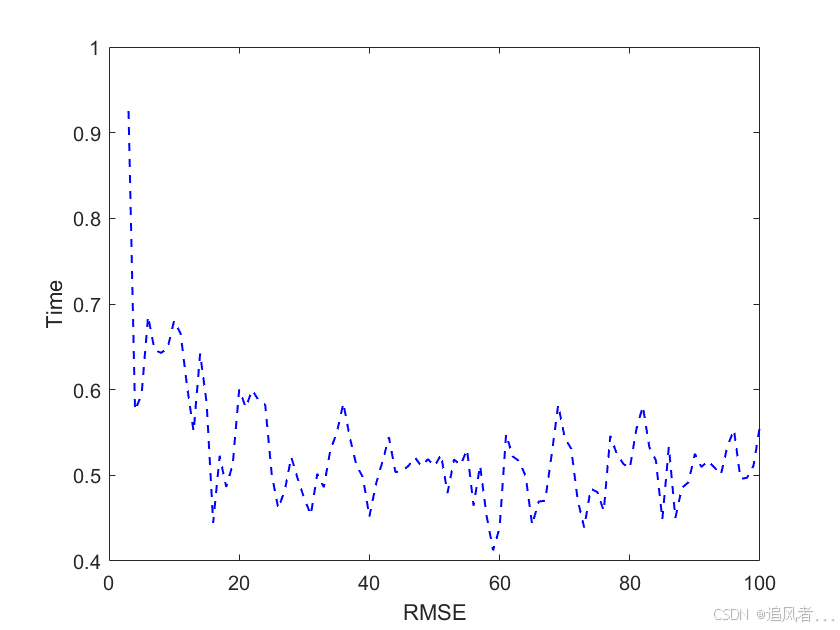
从仿真结果中可以看出,对应的滤波器能够实现较好的初始化,目标跟踪精度不断提升,说明了初始化的有效性。
总结
文章介绍了不同维度下的滤波初始化原理及仿真方法,并针对各种情况进行了仿真。从对应的仿真结果可以看出,不同维度状态向量下的滤波器都能成功完成滤波初始化,实现目标的有效跟踪。



















 6955
6955

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











