







版权声明:本文为博主原创文章,未经博主允许不得转载。
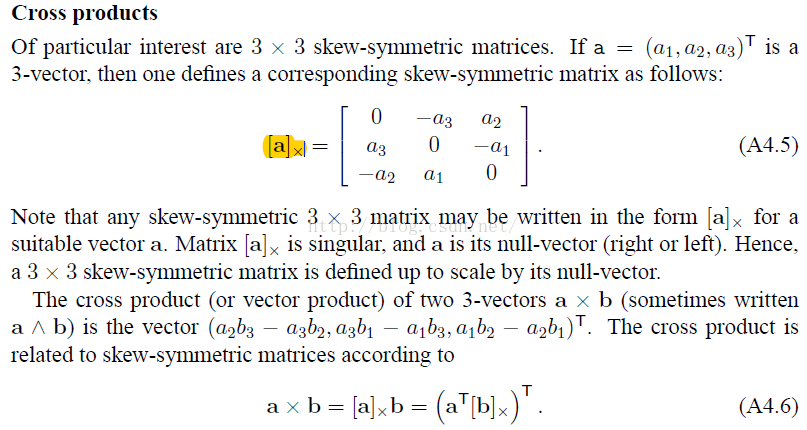
1. 叉乘
2. 双目系统

3. 对极几何 (Epipolar Geometry)
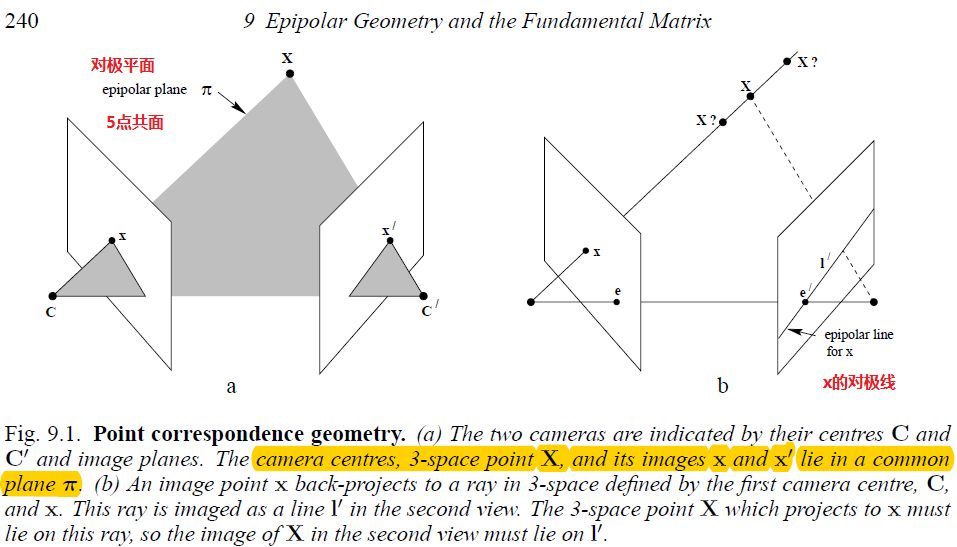
对极几何定义:是两个视图间的内部射影几何,它只与摄像机的内部参数和相对位姿有关,与场景结构无关。
基线(baseline):连接两个摄像机光心的线。
两个视图的对极几何的本质:描述图像平面与一个平面(以基线为旋转轴的平面)的交叉几何关系。
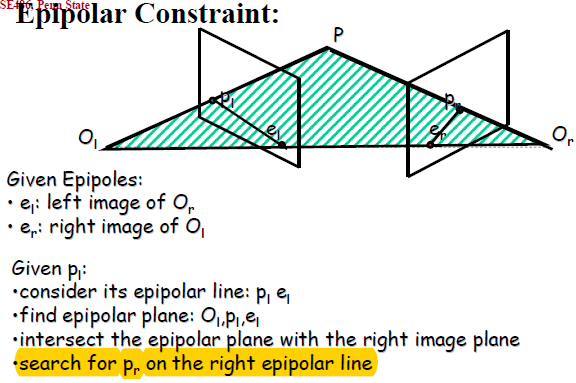
用途(对极约束:Epipolar Constraint):在双目匹配中,给定左图的一个点,不必在整个右图中搜索对应的点。“对极约束”把搜索空间缩减到一条线。
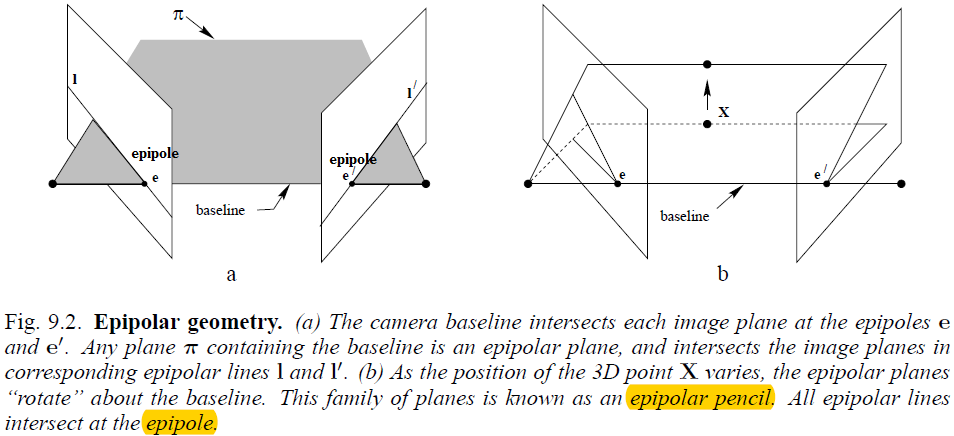
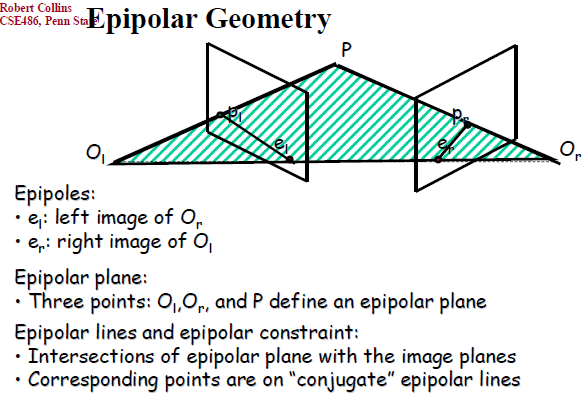
极点(Epipole):基线与图像平面的交叉点。即左图的极点:是左摄像机看到右摄像机所在的位置;右图的极点:是右摄像机看到左摄像机所在的位置。
对极平面(Epipolar Plane):包含基线的平面
对极线(Epipolar Line):对极平面与图像平面的交叉线。所有的对极线相交于极点,且位于同一对极平面的对极线一一对应。
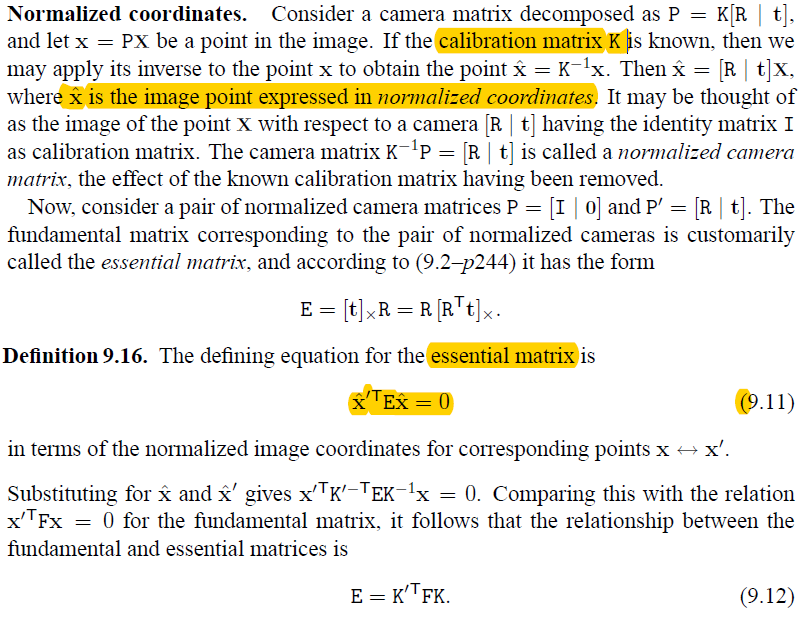
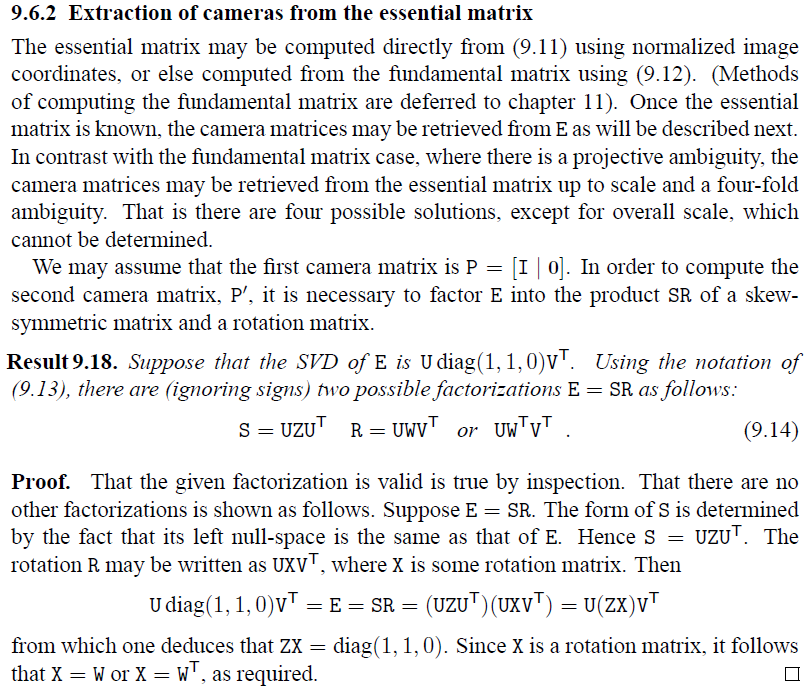
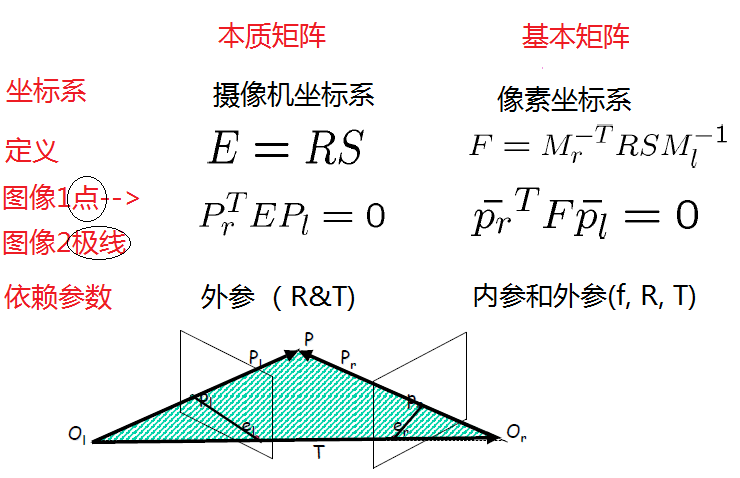
4. 本质矩阵 (Essential Matrix)-摄像机坐标系
本质矩阵就是在归一化图像坐标下的基本矩阵。不仅具有基本矩阵的所有性质,而且还可以估计两相机的相对位置关系,具体内容可参考《计算机视觉中的多视图几何》。
本质矩阵和基本矩阵都是3x3矩阵,且编码两个视图的对极几何。
在时间上,本质矩阵比基本矩阵先引入。基本矩阵是本质矩阵的推广,本质矩阵与基本矩阵相比有:
1)更少的自由度
2)更多的功能特性
4.1 本质矩阵的作用
1) 给定一个图像上的一个点,被本质矩阵或基本矩阵相乘,其结果为此点在另一个图像上的对极线,在匹配时,可以大大缩小搜索范围。
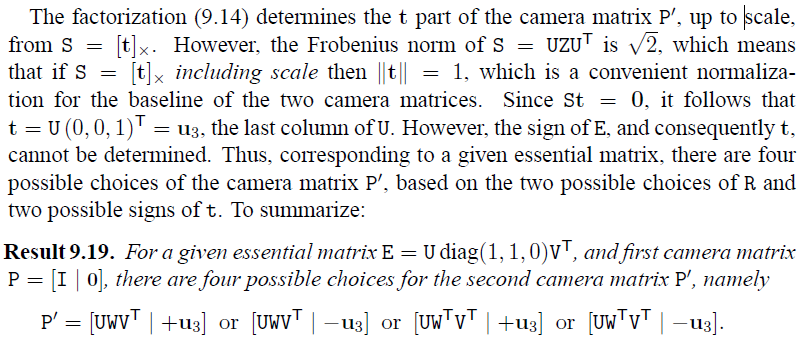
2)可用于求R 和 T
4.2 推导过程
在对极约束条(Epipolar Constraint)件下进行推导。
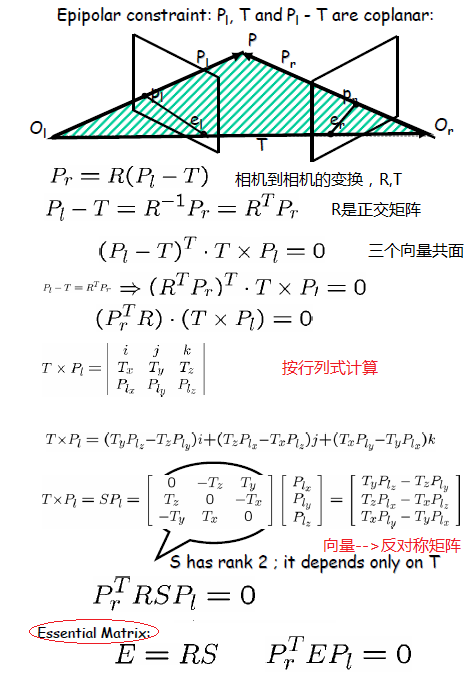
R: Rotation T: Translation
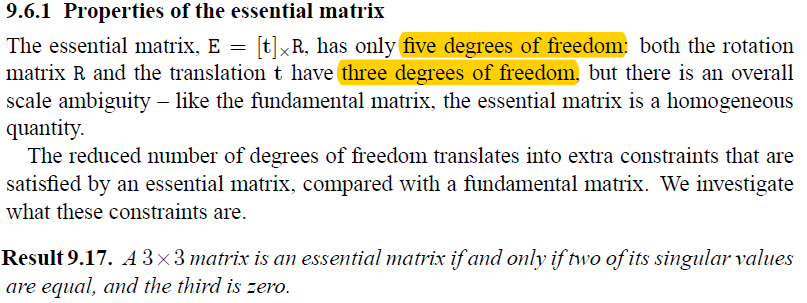
4.3 本质矩阵特性
1) rank (E) = 2 (本质矩阵的秩为2,非常重要)
2) 本质矩阵仅依赖外部参数(Extrinsic Parameters) (R & T)决定。
3) 使用摄像机(Camera)坐标系
4.4 Longuet-Higgins方程

上图中的pr、pl为camera坐标系。
4.5 本质矩阵总结

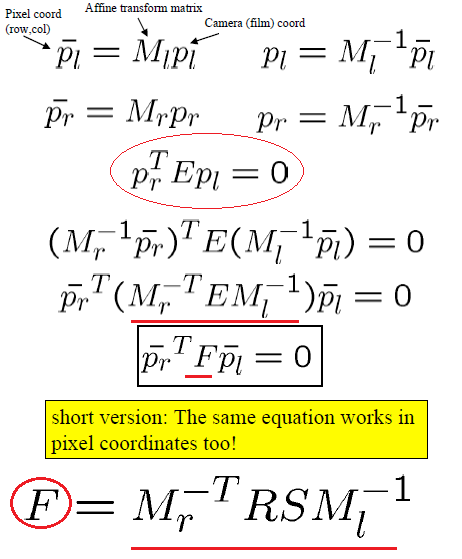
5. 基本矩阵(Fundamental Matrix)- 像素坐标系
5.1 推导过程
5.2 基本矩阵的特性
1) rank (F) = 2 (基本矩阵的秩为2,非常重要)
2) 基本矩阵依赖内部和外部参数(Intrinsic and Extrinsic Parameters) (f, R & T)决定。
3) 使用像素坐标系
4) F就是左边图像到右边图像的基本矩阵,从公式上可以看出基本矩阵是有方向的,右图到左图的基本矩阵就是F的转置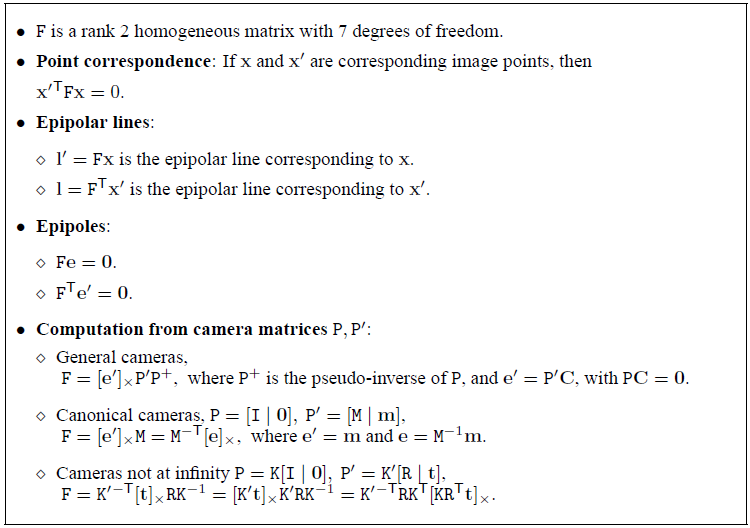
5.3 基本矩阵的作用
5.4 本质矩阵与基本矩阵的比较
5.5 其它(来自MVG)

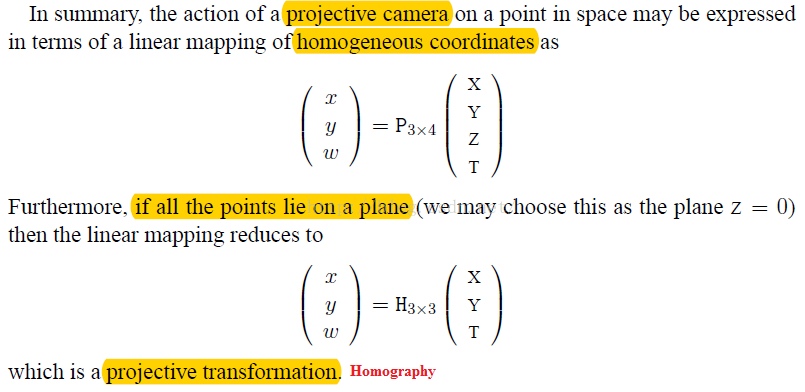
5. 单应矩阵(Homography Matrix)
5.1 Projective transformations
2D projective geometry is the study of properties of the projective plane IP2 that are invariant under a group of transformations known as projectivities.

A projectivity is also called a collineation (a helpful name), a projective transformation or ahomography: the terms are synonymous.

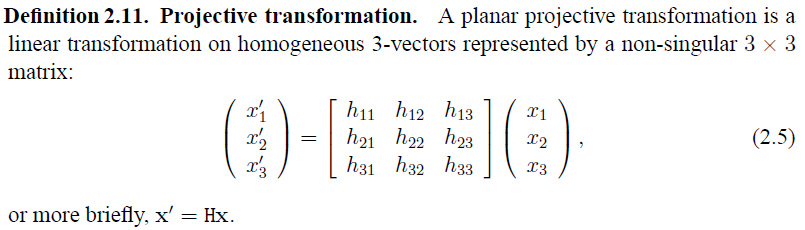
单应矩阵实际就是个透视变换矩阵,纯2D变换,我知道的只是用在了BA里做为一种约束条件而已。
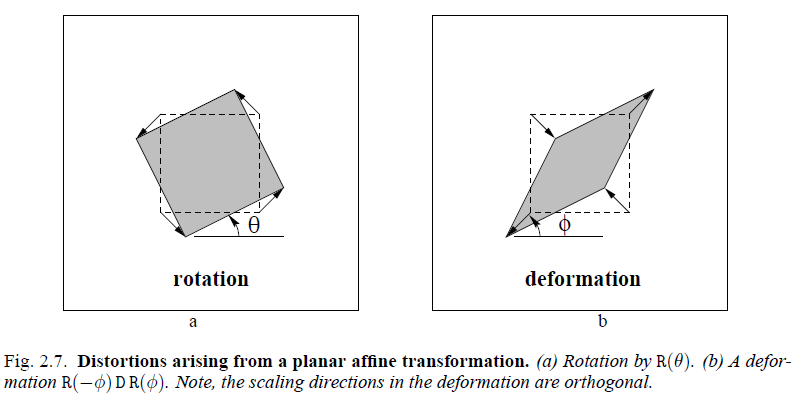
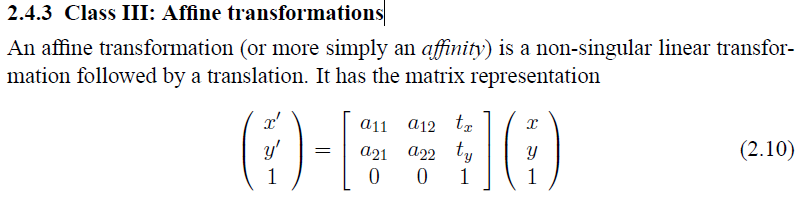
6. 仿射变换(Affine Transformations)
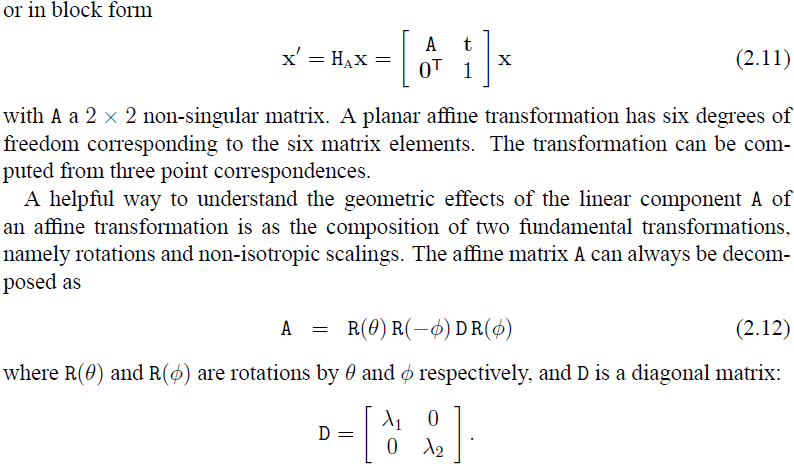
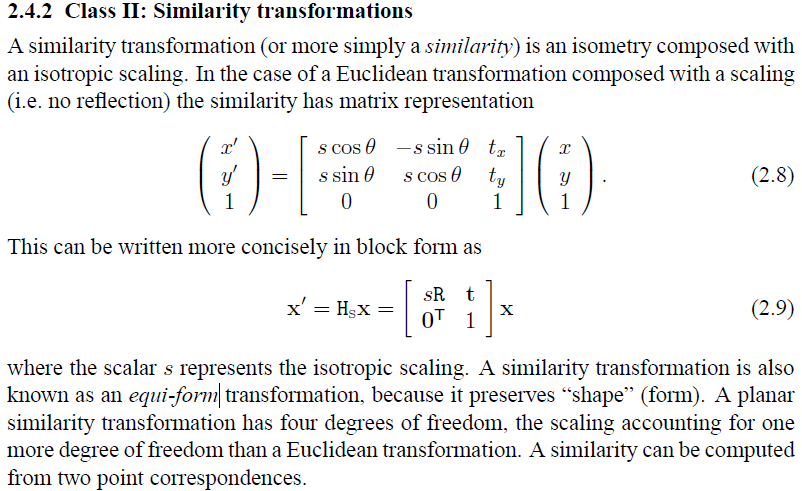
7. 相似变换Similarity Transformations
8. Camera Matrix














 2821
2821











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









