






在小车直线行驶时,经典也是常规的方案就是利用姿态模块、视觉模块或者红外模块等等,(还有电磁、ccd等等很多方案),但是视觉模块是很容易受到光线干扰的,很多比赛要用上opencv+树莓派才能满足要求。并且如果是要偏移一定角度,基本上也只能用姿态模块来实现。
本文重点在于介绍三种 六轴姿态传感器的Yaw角漂移去除 的思路,其中不乏本人自创且效果不错的程序,也是我目前在用的,以及学习了这么久,我所学到的其他两种去除思路,放在文章偏后的内容。
去除yaw角漂移,这是该模块的精髓所在,是实现小车直线、直角、偏移一定角等等操作的关键。
首先基础知识。
姿态模块当然常用mpu6050,或者其升级版icm20607。他们都是六轴传感器,缺少磁力计和气压计,所以z轴数据必定会出现不断增大的误差,从而造成计算出来的yaw角也会具有不断增大的误差。(明显表现为静止状态下,数值仍不断增大)
要使用这两个模块,首先要用通讯协议,获取这两个模块的原始数据,有很多方法,但都必须要学习I2C通讯的使用,在I2C通讯中,我们需要连续读取一片寄存器,还有使用硬件I2C,这样子才能加快我们计算的速度,减少中断时间,避免程序错误。当然硬件I2C跟软件I2C各有优缺点,有人说硬件会出错,我还没遇到过,反而软件I2C速度太慢,容易造成程序卡死,pid效率也会有影响。(具体程序具体分析)
原始数据来自于寄存器,并不能直接使用。所以有的人会使用别人写好的程序,或者使用dmp库。我们后面再讲dmp库是什么
在获取到原始数据之后,第一个必须要会的难点,就是零漂去除(注意是零漂),首先mpu6050中是要读取加速度计和陀螺仪两个部分的原始数据,对于加速度计原始数据的零漂,因为他里面含有重力加速度,这是不能去除的,所以我们要去除的是陀螺仪原始数据的零漂。
(静止状态下数据的一定数值,都静止了还有数值,所以他们都是硬件或者环境原因所造成的误差,就叫零漂,跟yaw角漂移区分开来)。
大概思路,在计算欧拉角之前,保持静止,获取一千个gx,gy,gz数据(陀螺仪三个轴的原始数据),分别算出平均值,保存为变量a,在后面正常运行获取的数据中,减去这个a,就能减去我们的零漂,从而让每次计算都能用上更精准的陀螺仪数据
大概代码如下:。
接下来,我们就要使用原始数据解算欧拉角,当然,如果使用Dmp库,甚至不用去除零漂,也不用学一堆数学知识来解算欧拉角了,但是使用了Dmp库难道就没有零漂和yaw角漂移吗?显然不会,所以dmp仍然存在更大的误差,特别是Yaw角的使用。
dmp库就是mpu6050这个模块官方推出的函数库,直接导入这个库到你的工程里面,调用他自带函数就能够直接获取mpu6050算出来的欧拉角。非常简单方便,你只需要做好通讯,什么角度都让他自己算就好了。
所以dmp虽然简单方便,难度低了,但是你的问题不会低。
重点!:
关于原始数据解算欧拉角,这涉及高等数学的知识,用各种公式去写出代码。网上的教程很多,但是对新手并不友好,完全不知道该做什么,也分不清什么是简单的。
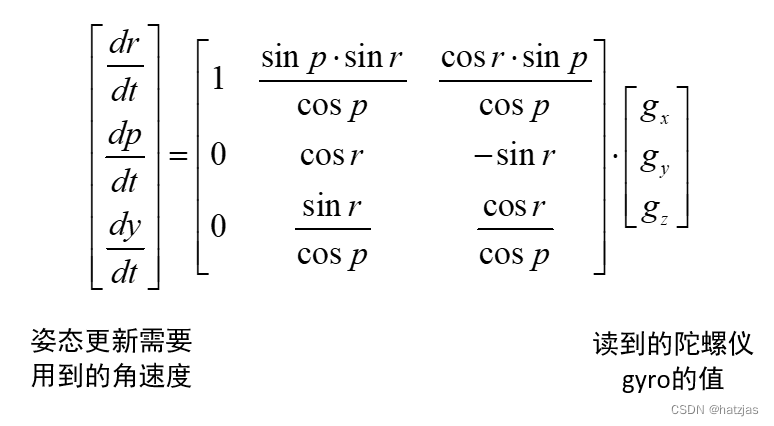
(本人学浅请多指教)实际上是有多种主流方法,第一种是直接由公式计算,网上有许多推导这个公式的文章,但都是写出了矩阵公式,如何转化为代码并没有讲。这些公式涉及到矩阵计算,还有反三角函数,公式首先用加速度计数据算出欧拉角(注意无法算出yaw角),然后再用陀螺仪数据可以计算出各个角的角速度值,我们起始肯定都是0度,所以同样,陀螺仪数据也能算出欧拉角,并且yaw角也能算!
公式总结如下。
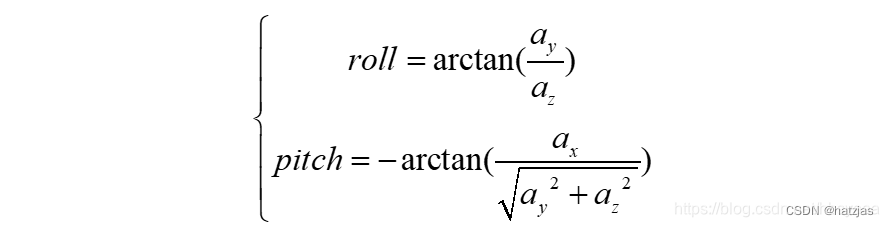
 (图片转载自他人)
(图片转载自他人)
这一方法一般配合一阶滤波算法,就是把加速度计算出的角度跟陀螺仪数据算出的角度进行比例融合,可以结合他们的误差特点,减少很大误差,因为加速度计只在静止状态下比较精准。
这一方法已经能得到很精准的roll跟pitch值了,但是我们的yaw角,还是因为六轴的限制,并且又不能融合(加速度计算不出yaw),种种原因导致了yaw必定存在不断变大的误差,这也是我们不能直接使用yaw的原因,必须加上其他算法,来弥补硬件不足!
公式转化为具体代码,网上貌似没有示例,不过也不难,学下矩阵计算就好了。加下我可以小小有偿给你发代码
其他方法:比如 四元数计算配合卡尔曼滤波,四元数配合二阶滤波,还有各种各样的算法,比起第一种方法,对高数要求更高了,并且不是简单看得懂的。他们都是计算方法或者滤波方法的不同,但最终都得到欧拉角,在无人机项目上,常用卡尔曼滤波算法。
算出角度,并且使用了滤波算法之后,即使是普通的一阶滤波,其实精度也不错了,但是你会发现,即使我们静止,即使去除了陀螺仪零漂,这个yaw角度值还是在不停地变化,这个时候,并不一定是由于算法的问题,而是你必须要知道,这是六轴姿态传感器肯定会面临的问题,就是yaw角不断变化的误差。
关于yaw角的作用,当然非常多,特别是无人机上,还有小车上,一般结合pid算法来使用,说白了,就是转弯角,转弯的角度,非常有用。
最终回到我们的重点,yaw角的漂移去除,以便我们能真正使用yaw角
1.第一种思路,对gz数据进行筛选,yaw角的变化是小幅度的,所以在gz上,我们可以筛选并去除那些小幅变化的数据,从而得到精准的yaw角(gz,即陀螺仪原始数据中z轴的数据,就是这个轴的数据在不断产生误差!)
2.第二种方法,统计误差值,进行线性回归计算。这也是很多人在用的,但是统计起来很麻烦,推荐大家可以用函数图像生成器,不用自己去做计算,不然太慢了,也不准。因为我们会发现误差是不断增加,比较符合一次函数,那我们不就能通过拟合的一次函数,计算出每个时刻的误差值吗?然后我们每次得到的yaw角,都必须减去每个时刻的误差,我们每次得到的yaw角,都存在误差
3.
!!要注意,我们只是在每次计算减去误差,实际上误差一直在yaw角中存在,我们只不过是通过计算,看见了我们想看见的yaw角
我在第一次用这个的时候,我在每次中断里面都减去同样的误差,因为我觉得这次减了,下次也减,那不就是一直在给yaw角做差吗?实际上是错误的,比如我们的误差是每秒增加0.08,那在第一个中断就要减去0.08,第二个中断就要减去0.16,而不是每个中断都减去0.08。因为我们并没有改变yaw实际的值,我们只是让yaw变成了我们想要看见的数值,对yaw做差,并不会让误差减小。可以具体尝试一下写出这个算法,会更理解些。
关于拟合曲线,就是统计误差和误差时间,比如1秒时误差5度,5秒误差25度,假设符合y=5x,那我们每次要用yaw角时,计算当时的时间,过了多久,然后乘以5,就是误差大小,再用yaw值减去误差就好了
这个思路已经能得到比较精准的yaw角的,除非你的程序要运行几十分钟甚至几个小时,这样误差会更加不可控,不好拟合。
并且这个算法的问题在于,我们不可能在每个时刻都得到很精准的值,算出来的值可能偏大也可能偏小,因为他实际上误差并不是线性的,只不过类似于线性。
第二个问题在于,,每个模块的误差变化都不一样,甚至你启动电压不一样,也会造成误差变化的不一样,这是经常遇到并且很难解决的问题!
总不可能每种情况,每个单片机,都做线性回归,这样工作量太大了,也没必要。我们只能做最贴切使用情况的线性拟合,并且单片机还不能换,芯片烧坏了又得重新拟合,所以这个方法在小项目精度还行,但是我觉得并不好用。
第三种,也是我自己想到的,目前在用的。所以网上肯定没人讲到这个东西。他也不难,但是你又可能想不到、并且学不到这个思路。虽然他才短短几行,但是他也比较宝贵,希望大家都对mpu6050能更加熟悉,理解跟用好
大概:
if(error<0.008)erro_sumr+=error
error=yaw-yaw_last
yaw-=error
实际上就是,如果yaw值变化小,我们就认为他没有变化,是误差所产生的变化。所以我们要忽略掉这些变化。经过实践,!我们只要筛选掉 每5ms内,yaw角变化在正负0.008°内 的yaw值,我们就已经能基本上无视yaw的误差了!,对于自增或者自减,对于不同环境下的姿态模块,全都适用且简单!
我们会发现他是去掉小角度变化,如果我们走直线时角度变化本来就比较小呢?会不会影响到正常数据?会不会影响到精度。
其实,完全不会影响走直线的问题,因为5ms变化正负0.008,是非常小的值。但是对正常数据的影响,肯定是有的,只要你对六轴姿态模块学的好,其实你就要知道,这个误差是不可能完全消除的,软件上,程序上,永远只是减小误差。
这个方法非常简单好用,完全足够mpu6050进行直线,直角弯,转指定角度等任务,并且不用做线性回归等复杂操作。但是有缺点,就是会对正常的角度变化数据产生影响,,但是这个影响基本可以忽略。同样的要注意,我们要在每个中断中累加我们记下来的需要忽略的角度值,然后减去这个累加的值,每次都需要累加。因为还是那句话,我们并没有让误差消失,我们只是让他不再显示,误差在每次计算得到的yaw值中仍然在不断累加。
如果你静止不动,这个算法甚至可以让yaw也完全没有变化,第一次实现的时候,还是很让人震惊的,如果你被这个误差一直困扰的话。
再回到第一种方法,其实他跟第三种有点像,但是第三种的好处在于,dmp库同样能用,因为dmp库完全接触不到gz这种原始数据!
这个算法具体的代码,或者其他各种模块的代码,如编码器测速,超声波,串口通讯等等,有需要的可以联系我,小小有偿获取。也可以联系我,相互指导学习。

















 513
513

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









