







目标跟踪(最全最详细的卡尔曼滤波法:原理+代码)【西电电子信息综合实验四】
这里只讨论线性滤波方法,非线性滤波在这里不讨论
一.状态方程描述
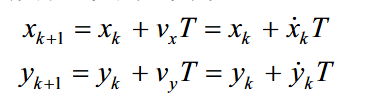
若讨论二维匀速模型,可以非常容易的得出位置状态转移的方程
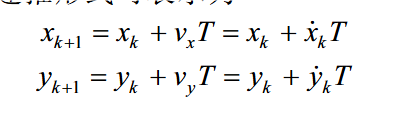
也可以非常容易的得到速度状态转移的方程
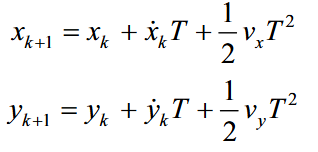
如果讨论过程噪声:就是目标不可能做绝对匀速运动,其速度必然有一些小的随机波动,例如目标在匀速运动过程中,
驾驶员或环境扰动等都可造成速度出现不可预测的变化,像飞机飞行过程中云层和阵风
对飞机飞行速度的影响等,而这些速度的小的变化可看作过程噪声来建模
那么加上过程噪声之后的位置状态转移方程为,
加上过程噪声之后的速度状态转移方程为
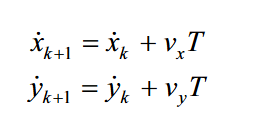
用矩阵的形式表达为:
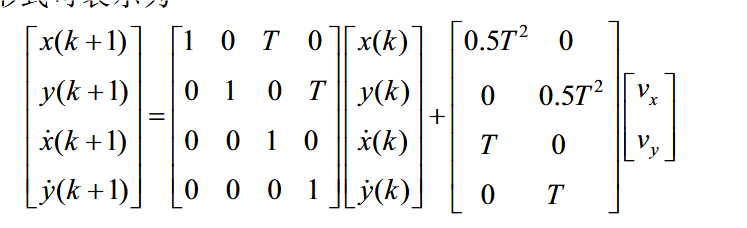
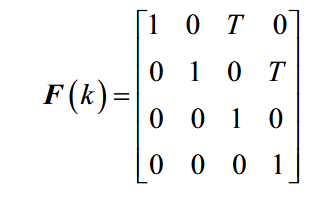
有状态转移方程

可以得到状态转移矩阵 :F(K)
按照教案,只考虑零均值的高斯白噪声模型为
 =
=
那么有状态转移方程


二.量测方程:是雷达测量过程的假设,对于线性系统而言量测方程可表示为

符号解释:Z(k+1)为量测向量;H(k+1)为量测矩阵;W(k+1)为具有协方差 R(k+1)
的零均值、白色高斯量测噪声序列
又因为状态向量为:
量测向量为:
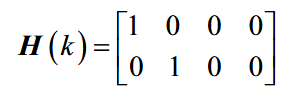
因此为了满足量测方程,有量测矩阵H(X):
三.卡尔曼滤波方法
根据最小均方误差推导得出

通过卡尔曼算法,通过新息与卡尔曼增益的乘积加上状态的第一步预测,得到状态的最终预测值

这里的新息是量测的估计值和量测的预测值的差值
卡尔曼增益由状态向量和量测向量的协方差矩阵构成
这一段内容很难看懂,不过,本质上,就是通过量测和状态,预测出下一个点的状态向量,接下来会详细解释其过程
具体步骤如下:
1.状态的第一步预测:

上面的G(K)*U(K)是控制量这里不予讨论,忽略得到状态第一步预测的简化方程

2.量测的预测值

3.状态值误差
由状态值的估计值减去状态预测值的第一步预测值得到

4.衡量预测协方差矩阵

这里的 Q矩阵是合成噪声矩阵,我们假设各噪声相互独立,且都是零均值的高斯白噪声,那么该矩阵为单位矩阵,所以后面的噪声合成矩阵我们都假定为单位矩阵。
这里用估计值减去预测值,再衡量协方差,其意义是通过协方差矩阵衡量预测的不确定性
协方差越小,预测准确性越大,不确定性越小。
5.量测值误差(新息)
由量测值的估计值减去量测预测值的第一步预测值得到

也可以用v(k+1)表示新息

6.衡量量测协方差矩阵(新息协方差矩阵)
同理可得

同理,其也能衡量新息的不确定性,协方差越小,预测准确性越大,不确定性越小
7.状态与量测之间的协方差矩阵

8.衡量最小均方误差所得到的预测值
由
有
由上下恒等式可以推出卡尔曼增益:

这样就能计算出卡尔曼增益,也就能通过量测和状态量预测出下一个状态量了!
9.协方差更新方程为

这里相减的理解是融合克尔曼增量到新的协方差中,这里的推导可以理解为在更新状态后,如何将新观测的不确定性融入到状态协方差中。通过 K k K_k Kk 的引入,我们能够调整协方差,使其反映观测对状态估计的不确定性影响。(说实话这一步不是很懂,能用就行)
整理,简化之后,可以得到以下算法流程
四.算法流程
- 初始设定
在卡尔曼滤波中,状态模型可以表示为:
x k = F x k − 1 + w k x_k = F x_{k-1} + w_k xk=Fxk−1+wk
其中:
(x_k) 是时刻 (k) 的状态向量。
(F) 是状态转移矩阵。
(w_k) 是过程噪声,通常假设为均值为零的高斯噪声,协方差为 (Q)。
观测模型为:
z k = H x k + v k z_k = H x_k + v_k zk=Hxk+v
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 8万+
8万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









