







上一篇介绍了Tello无人机仿真环境中的飞行控制,本篇将介绍tello无人机在物理系统中的轨迹跟踪,实现实物无人机的速度控制。本文采用的无人机为Tello TT,TELLO Talent由飞行器和拓展配件两部分组成。飞行器配备视觉定位系统,并集成飞控系统,能稳定悬停、飞行。可显示高清画面,并可实现拍照、录影、弹跳、全向翻滚以及一键飞行等功能。Tello相机可拍摄500万像素照片与720ρ高清视频。最长飞行时间约为13分钟。Tello TT SDK通过WiFi-UDP协议与飞行器连接,让用户可以通过文本指令控制飞行器。
无人机控制指令
这里使用库文件DJITelloPy,是一个大疆Tello无人机的Python接口, 使用官方Tello SDK 和 Tello EDU SDK。 这个库支持使用所有的tello命令,可以轻松获取视频流,接受并解析状态包,可以操控多架无人机,支持Python3.6以上版本。
使用pip安装
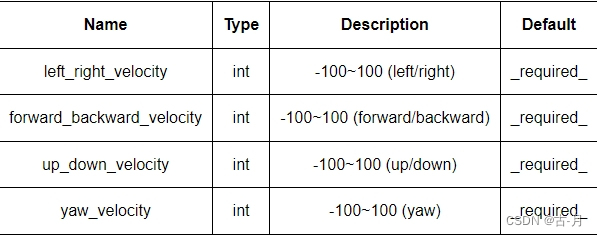
pip install djitellopy -i https://pypi.tuna.tsinghua.edu.cn/simple/本系统是要控制无人的速度,采用的接口是send_rc_control(left_right_velocity, forward_backward_velocity, up_down_velocity, yaw_velocity)
光学定位系统
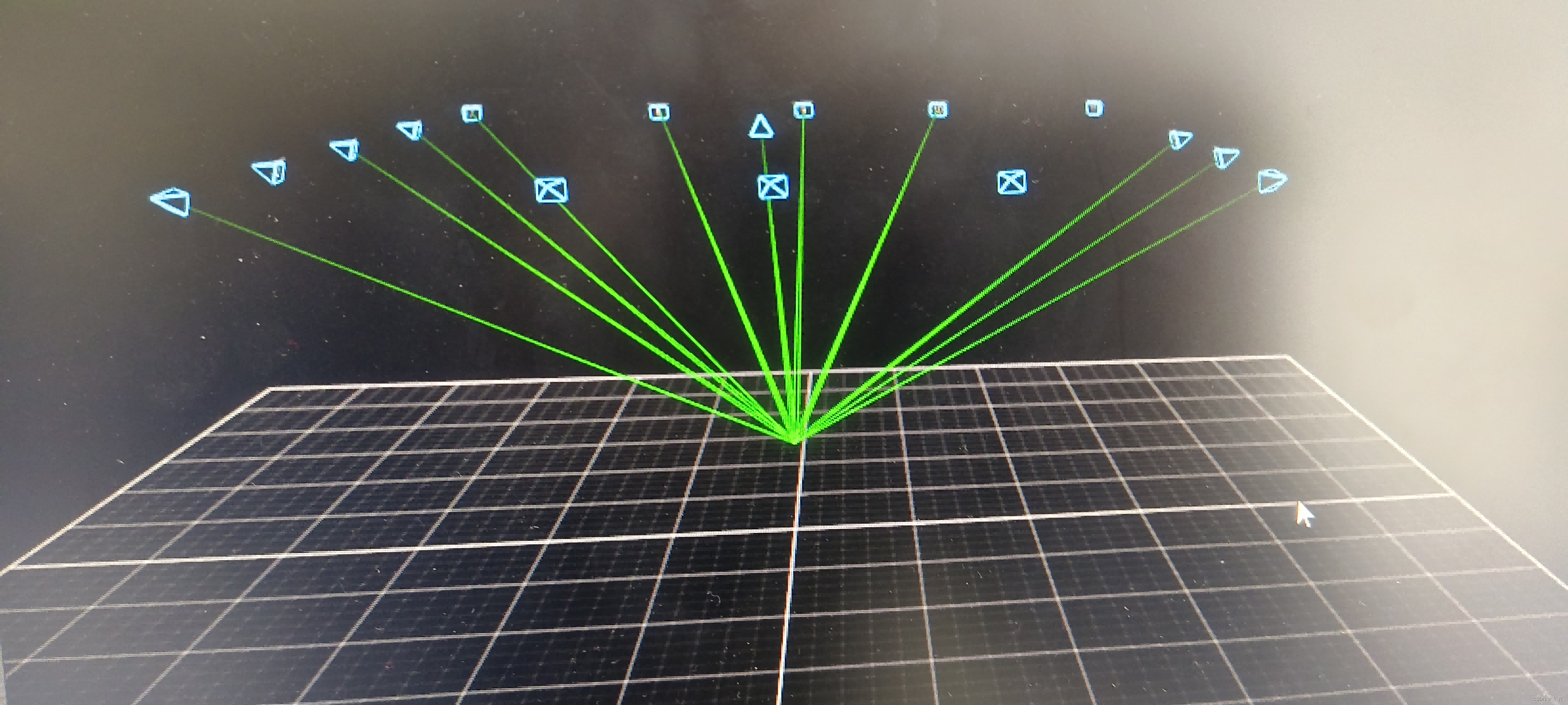
OptiTrack是高性能光学跟踪系统,可以获取场地中物体的亚像素级位置。采用被动式红外光学定位技术,每套系统内包含一个中央处理单元和多台红外摄像头,系统内的摄像头由中央处理单元统一调配并进行计算。 在被跟踪的目标物体表面上会固定一些红外反光率很高的标识点,以供系统进行跟踪和测量。下图安装在Tello上的即为定位标识点。

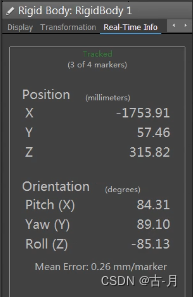
使用Motive软件,根据定位点的位置,构造刚体,如下图所示
可在project视图中查看刚体的的位姿信息,即无人机的位置x,y,z及欧拉角pitch,yaw,roll
在Data Streaming视图中,开启局域网数据广播,用于数据传输,注意要填写本机IP及接收数据电脑的IP地址。

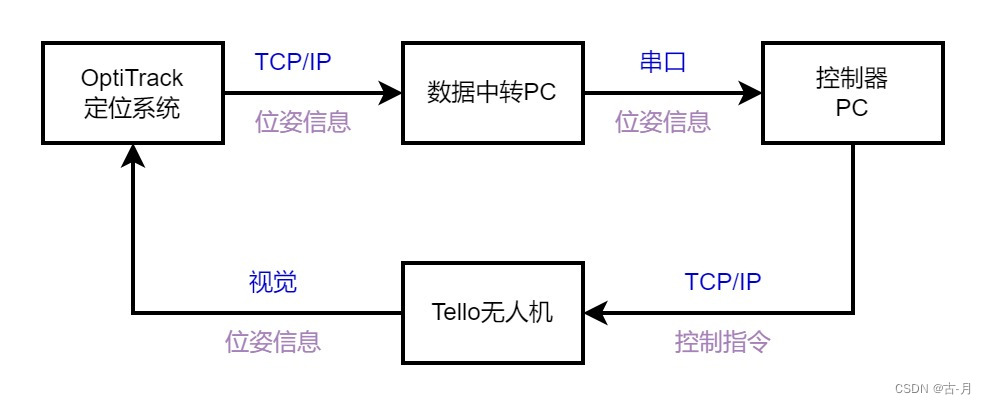
经测试,工作在路由模式的Tello使用速度控制指令进行控制时,延时较高,不满足实验要求,所以采用直连模式进行实验,但此时的发送控制指令的计算机需连接tello无线网,无法接收定位系统的数据,故采用另一个计算机进行数据中转,数据传输框图如下图所示:
 点击【Tello无人机】实物轨迹跟踪控制 - 古月居可查看全文
点击【Tello无人机】实物轨迹跟踪控制 - 古月居可查看全文

















 956
956

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









