






观前提醒:本期内容为ESP32的FreeRTOS、ESP32多核任务编程。
项目预告:一个无需计算机板卡,可以多机互动的,百元左右的物联ROS底盘车
ESP32多线程编程深入解析
在物联网(IoT)的项目中,多任务处理是一个常见的需求。ESP32,作为一款性能强大的微控制器,它内置了双核处理器以及支持多线程的FreeRTOS操作系统,使得同时处理多个任务成为可能。本文将从浅入深地解析ESP32的多线程编程方法和其特点。
一、ESP32S3多核功能简介
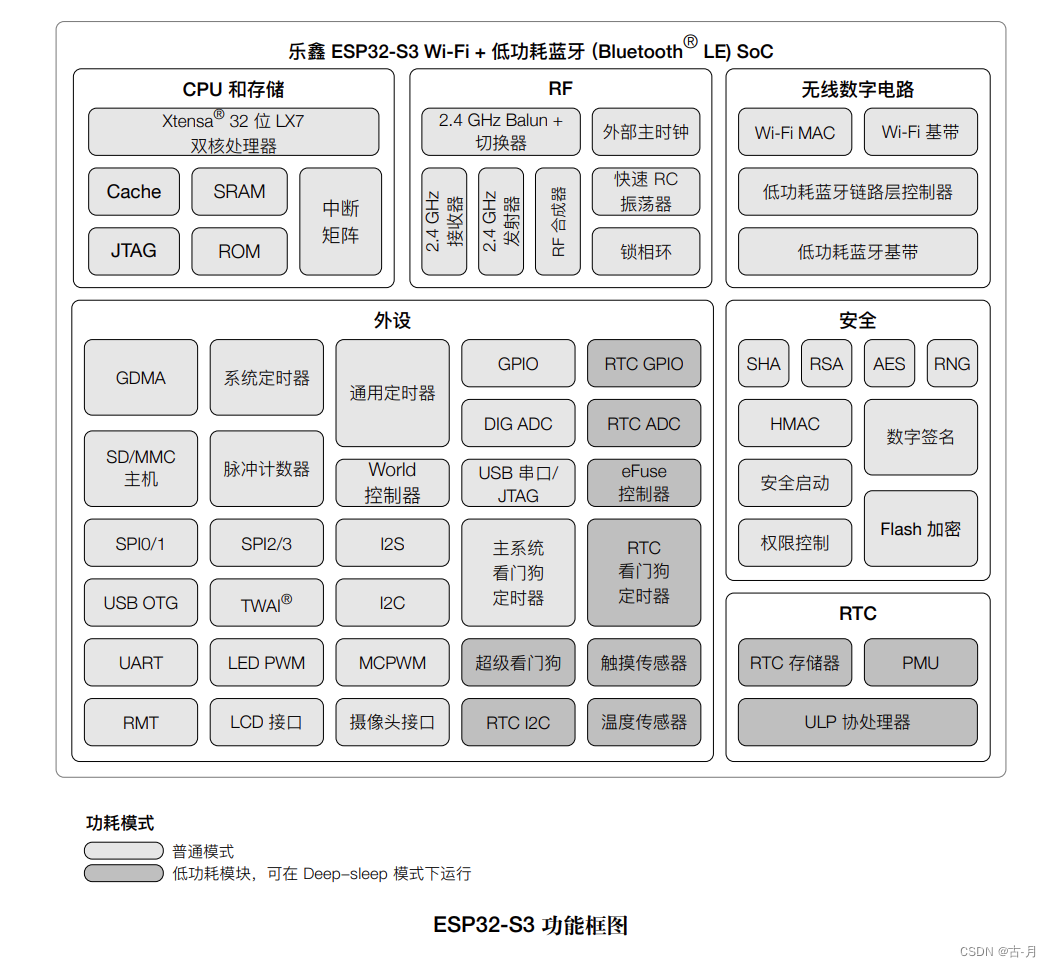
ESP32-S3 是 Espressif Systems 开发的一款低功耗微控制器,它是 ESP32 系列的一部分,专为通用低功耗设备、物联网 (IoT) 应用和智能家居等领域设计。
ESP32-S3 采用了双核 Xtensa® 32-bit LX7 微处理器,这意味着它有两个处理核心可以同时运行任务,提高了处理能力和多任务处理的效率。这两个核心可以独立运行,也可以协同工作,处理复杂的计算任务或多个并发操作。
在使用 ESP32-S3 进行编程时,可以指定特定的任务运行在哪个核心上。这可以通过使用 FreeRTOS(实时操作系统)来实现,FreeRTOS 是 ESP32-S3 常用的操作系统。
二、FreeRTOS简介
FreeRTOS是一个迷你的实时操作系统内核,为多任务处理提供了丰富的API。在ESP32上,FreeRTOS已经被高度集成和优化,可以充分利用ESP32的双核处理器。FreeRTOS的主要特点包括:
- 任务管理:可以创建、删除、挂起和恢复多个任务。
- 同步原语:包括互斥量、信号量、事件标志等,用于任务间的同步。
- 内存管理:提供动态内存分配和释放。
- 定时器:提供软件定时器,用于定时任务的执行。
简要介绍一下FreeRTOS在ESP32上的底层实现:
FreeRTOS在ESP32上的底层实现涉及到硬件抽象、中断管理、多核调度等方面
- 硬件抽象层(HAL)
FreeRTOS为不同的硬件平台提供了硬件抽象层,这样FreeRTOS的核心代码可以在不同的硬件上运行而无需修改。在ESP32上,HAL包括对CPU、定时器、中断控制器等硬件资源的抽象。这些抽象使得FreeRTOS能够利用ESP32的硬件特性,如定时器用于调度器的时基,中断控制器用于管理中断。
- 中断管理
ESP32的中断管理是通过它的中断控制器来实现的。FreeRTOS定义了一套中断服务例程(ISR)的编写规则,这些规则确保了ISR可以安全地与FreeRTOS的任务和内核对象交互。例如,FreeRTOS提供了portENTER_CRITICAL和portEXIT_CRITICAL宏来在ISR中保护临界区,防止任务切换时数据不一致。
- 多核调度
ESP32的FreeRTOS利用了双核心的特性来实现多核调度。FreeRTOS的调度器被设计为可以在多核环境下运行,每个核可以运行自己的任务。FreeRTOS在ESP32上的实现使用了特殊的同步机制,如“spinlock”锁,来同步两个核上的任务状态。
- 任务切换和上下文保存
任务切换是多任务操作系统的核心,它允许CPU在不同的任务之间切换执行。在ESP32上,FreeRTOS的任务切换涉及到保存和恢复任务的上下文,包括CPU寄存器等状态信息。FreeRTOS使用汇编语言编写的上下文切换函数portSAVE_CONTEXT和portRESTORE_CONTEXT来处理这些操作,确保任务切换时能够正确保存和恢复每个任务的状态。
三、ESP32多线程编程基础
基础多线程例程:
#include <Arduino.h>// 定义任务句柄TaskHandle_t Task1;TaskHandle_t Task2;// 定义任务函数void Task1code( void * pvParameters ){ Serial.print("Task1 running on core "); Serial.println(xPortGetCoreID()); for(;;){ Serial.println("This is Task1"); vTaskDelay(1000 / portTICK_PERIOD_MS); // 延迟1秒 }}void Task2code( void * pvParameters ){ Serial.print("Task2 running on core "); Serial.println(xPortGetCoreID()); for(;;){ Serial.println("This is Task2"); vTaskDelay(2000 / portTICK_PERIOD_MS); // 延迟2秒 }}void setup() { Serial.begin(115200); // 创建任务 xTaskCreatePinnedToCore( Task1code, /* 任务函数 */ "Task1", /* 任务名字 */ 10000, /* 栈大小 */ NULL, /* 传递给任务函数的参数 */ 1, /* 优先级 */ &Task1, /* 任务句柄 */ 0); /* 核心编号 */ xTaskCreatePinnedToCore( Task2code, "Task2", 10000, NULL, 1, &Task2, 1);}void loop() { // 在这里不需要做任何事情,因为所有的工作都在任务中完成}在这个例程中,我们创建了两个任务(Task1和Task2)。每个任务都在不同的核心上运行(ESP32S3有两个核心)。每个任务都会打印一条消息,然后延迟一段时间。Task1每秒打印一次消息,而Task2每两秒打印一次消息。

可以看到Task1运行在core 0,Task2运行在core 1
简单分析一下以上的程序,我们可以看到,实现多线程的主要函数只有两个:
Task1code与xTaskCreatePinnedToCore
Task1code函数:
Task1code是任务函数,用于在FreeRTOS任务中执行。在这个例程中,它被用作任务1的主体。下面是对这个函数的详细分析:
点击《物联ROS智能车前传》ESP32多线程编程 - 古月居可查看全文















 338
338

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









