






carsim simulink仿真,纯电动汽车Acc 自适应巡航
上层控制器 包括 mpc跟车加速度计算 巡航pid 。
安全距离计算,跟车巡航切换策略等
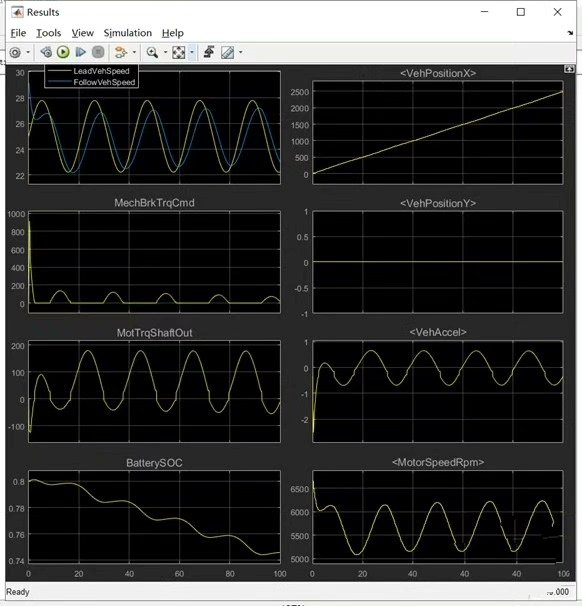
下层控制器 纯电动车模型搭建, 包含制动驱动扭矩计算,制动驱动切换,制动能量回收,电池电量soc估算等
ID:99900714496309594
车辆工程控制指导
车辆仿真在汽车行业中扮演着至关重要的角色,它可以帮助我们在实际制造车辆之前对其性能进行评估和优化。在现代汽车技术中,纯电动汽车成为了一个热门话题,尤其是对于环保意识的提高和对可再生能源的需求增加。在开发和测试纯电动汽车的控制系统时,通过使用Carsim和Simulink进行仿真,可以有效地提高汽车系统的性能和安全性。
纯电动汽车Acc自适应巡航系统是车辆的一个重要组成部分。它在高速公路等道路上起到了自动控制车辆速度和跟车距离的作用。从整体上看,上层控制器和下层控制器都在纯电动汽车Acc自适应巡航系统中发挥着重要的作用。
上层控制器涉及到MPC(模型预测控制)和巡航PID控制算法。MPC跟车加速度计算可以准确地根据前车的速度来计算车辆的加速度,从而实现精确的跟车控制。而巡航PID控制算法可以根据车辆的速度和距离目标速度的差距进行调整,以实现稳定的巡航效果。这些上层控制算法通过车辆的传感器和控制器来实时获取和处理数据,以控制电动汽车的加速度和距离。
下层控制器主要是针对纯电动车模型的搭建和控制。其中包括制动驱动扭矩的计算、制动驱动的切换、制动能量的回收和电池电量SOC(State of Charge)的估算等。制动驱动扭矩的计算可以根据车辆的速度和制动操作的力矩来计算制动力矩的大小,从而实现制动时的驱动力矩控制。制动驱动的切换可以根据车辆的状态和驾驶员的操作来实现刹车和加速的切换。制动能量的回收可以将制动时产生的能量转化为电能并储存在电池中,以提高电池的续航能力。电池电量SOC的估算可以根据电池的电流和电压变化来估算电池的剩余电量,以帮助驾驶员合理地使用电动汽车。
整个纯电动汽车Acc自适应巡航系统的实现离不
【相关代码,程序地址】:http://fansik.cn/714496309594.html
















 5454
5454

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









