








非局部均值去噪算法其实很简单,该种去噪方法和高斯去噪和双边滤波器去噪很像,都是利用一些准则,通过“周围”的像素点加权估计像素点的真实值,如下图所示:
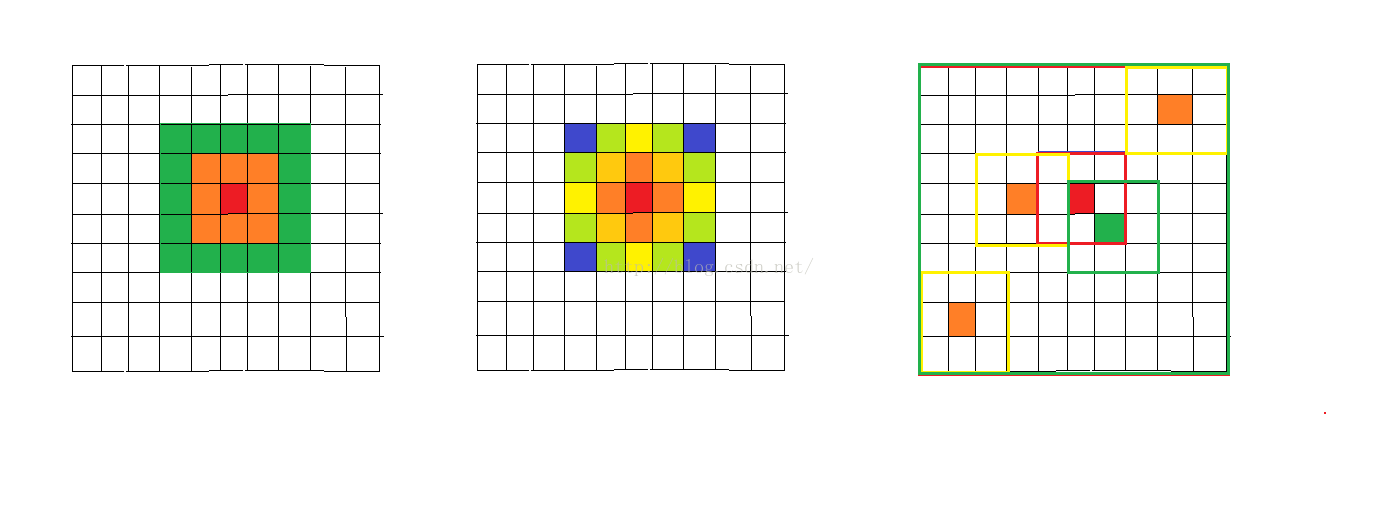
最左边一副图表示Gauss滤波的特点,就是利用图像像素点相近的程度来估计权重,中间幅图表示双边滤波器在考虑像素点本身取值的相近性以外,还考虑了相近像素点与被估计的像素点的距离,如果离被估计的像素点越近将具有更高的权重,非局部均值则是在一个窗口中搜索相近的图像块来进行权重分配(如绿色的框内的区域为搜索的区域,黄色的窗口为搜索的图像块,深褐色的窗口中的中心点为需要去噪的点,通过加权的形式将最相近的几个像素块中的中心点结合起来估计真实值。
下面以去噪结果作为示例(http://opencv.jp/sample_code):
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
// additional functions/
void addNoiseSoltPepperMono(Mat& src, Mat& dest, double per)
{
cv::RNG rng;
#pragma omp parallel for
for (int j = 0; j<src.rows; j++)
{
uchar* s = src.ptr(j);
uchar* d = dest.ptr(j);
for (int i = 0; i<src.cols; i++)
{
double a1 = rng.uniform((double)0, (double)1);
if (a1>per)
d[i] = s[i];
else
{
double a2 = rng.uniform((double)0, (double)1);
if (a2>0.5)d[i] = 0;
else d[i] = 255;
}
}
}
}
void addNoiseMono(Mat& src, Mat& dest, double sigma)
{
Mat s;
src.convertTo(s, CV_16S);
Mat n(s.size(), CV_16S);
randn(n, 0, sigma);
Mat temp = s + n;
temp.convertTo(dest, CV_8U);
}
void addNoise(Mat&src, Mat& dest, double sigma, double sprate = 0.0)
{
if (src.channels() == 1)
{
addNoiseMono(src, dest, sigma);
if (sprate != 0)addNoiseSoltPepperMono(dest, dest, sprate);
return;
}
else
{
Mat s[3];
Mat d[3];
split(src, s);
for (int i = 0; i<src.channels(); i++)
{
addNoiseMono(s[i], d[i], sigma);
if (sprate != 0)addNoiseSoltPepperMono(d[i], d[i], sprate);
}
cv::merge(d, 3,dest);
}
}
static double getPSNR(Mat& src, Mat& dest)
{
int i, j;
double sse, mse, psnr;
sse = 0.0;
for (j = 0; j<src.rows; j++)
{
uchar* d = dest.ptr(j);
uchar* s = src.ptr(j);
for (i = 0; i<src.cols; i++)
{
sse += ((d[i] - s[i])*(d[i] - s[i]));
}
}
if (sse == 0.0)
{
return 0;
}
else
{
mse = sse / (double)(src.cols*src.rows);
psnr = 10.0*log10((255 * 255) / mse);
return psnr;
}
}
double calcPSNR(Mat& src, Mat& dest)
{
Mat ssrc;
Mat ddest;
if (src.channels() == 1)
{
src.copyTo(ssrc);
dest.copyTo(ddest);
}
else
{
cvtColor(src, ssrc, CV_BGR2YUV);
cvtColor(dest, ddest, CV_BGR2YUV);
}
double sn = getPSNR(ssrc, ddest);
return sn;
}
//main implementaion
void nonlocalMeansFilter(Mat& src, Mat& dest, int templeteWindowSize, int searchWindowSize, double h, double sigma = 0.0)
{
if (templeteWindowSize>searchWindowSize)
{
cout << "searchWindowSize should be larger than templeteWindowSize" << endl;
return;
}
if (dest.empty())dest = Mat::zeros(src.size(), src.type());
const int tr = templeteWindowSize >> 1;
const int sr = searchWindowSize >> 1;
const int bb = sr + tr;
const int D = searchWindowSize*searchWindowSize;
const int H = D / 2 + 1;
const double div = 1.0 / (double)D;//search area div
const int tD = templeteWindowSize*templeteWindowSize;
const double tdiv = 1.0 / (double)(tD);//templete square div
//create large size image for bounding box;
Mat im;
copyMakeBorder(src, im, bb, bb, bb, bb, cv::BORDER_DEFAULT);
//weight computation;
vector<double> weight(256 * 256 * src.channels());
double* w = &weight[0];
const double gauss_sd = (sigma == 0.0) ? h : sigma;
double gauss_color_coeff = -(1.0 / (double)(src.channels()))*(1.0 / (h*h));
int emax;
for (int i = 0; i < 256 * 256 * src.channels(); i++)
{
double v = std::exp(max(i - 2.0*gauss_sd*gauss_sd, 0.0)*gauss_color_coeff);
w[i] = v;
if (v<0.001)
{
emax = i;
break;
}
}
for (int i = emax; i < 256 * 256 * src.channels(); i++)w[i] = 0.0;
if (src.channels() == 3)
{
const int cstep = im.step - templeteWindowSize * 3;
const int csstep = im.step - searchWindowSize * 3;
#pragma omp parallel for
for (int j = 0; j<src.rows; j++)
{
uchar* d = dest.ptr(j);
int* ww = new int[D];
double* nw = new double[D];
for (int i = 0; i<src.cols; i++)
{
double tweight = 0.0;
//search loop
uchar* tprt = im.data + im.step*(sr + j) + 3 * (sr + i);
uchar* sptr2 = im.data + im.step*j + 3 * i;
for (int l = searchWindowSize, count = D - 1; l--;)
{
uchar* sptr = sptr2 + im.step*(l);
for (int k = searchWindowSize; k--;)
{
//templete loop
int e = 0;
uchar* t = tprt;
uchar* s = sptr + 3 * k;
for (int n = templeteWindowSize; n--;)
{
for (int m = templeteWindowSize; m--;)
{
// computing color L2 norm
e += (s[0] - t[0])*(s[0] - t[0]) + (s[1] - t[1])*(s[1] - t[1]) + (s[2] - t[2])*(s[2] - t[2]);//L2 norm
s += 3, t += 3;
}
t += cstep;
s += cstep;
}
const int ediv = e*tdiv;
ww[count--] = ediv;
//get weighted Euclidean distance
tweight += w[ediv];
}
}
//weight normalization
if (tweight == 0.0)
{
for (int z = 0; z<D; z++) nw[z] = 0;
nw[H] = 1;
}
else
{
double itweight = 1.0 / (double)tweight;
for (int z = 0; z<D; z++) nw[z] = w[ww[z]] * itweight;
}
double r = 0.0, g = 0.0, b = 0.0;
uchar* s = im.ptr(j + tr); s += 3 * (tr + i);
for (int l = searchWindowSize, count = 0; l--;)
{
for (int k = searchWindowSize; k--;)
{
r += s[0] * nw[count];
g += s[1] * nw[count];
b += s[2] * nw[count++];
s += 3;
}
s += csstep;
}
d[0] = saturate_cast<uchar>(r);
d[1] = saturate_cast<uchar>(g);
d[2] = saturate_cast<uchar>(b);
d += 3;
}//i
delete[] ww;
delete[] nw;
}//j
}
else if (src.channels() == 1)
{
const int cstep = im.step - templeteWindowSize;
const int csstep = im.step - searchWindowSize;
#pragma omp parallel for
for (int j = 0; j<src.rows; j++)
{
uchar* d = dest.ptr(j);
int* ww = new int[D];
double* nw = new double[D];
for (int i = 0; i<src.cols; i++)
{
double tweight = 0.0;
//search loop
uchar* tprt = im.data + im.step*(sr + j) + (sr + i);
uchar* sptr2 = im.data + im.step*j + i;
for (int l = searchWindowSize, count = D - 1; l--;)
{
uchar* sptr = sptr2 + im.step*(l);
for (int k = searchWindowSize; k--;)
{
//templete loop
int e = 0;
uchar* t = tprt;
uchar* s = sptr + k;
for (int n = templeteWindowSize; n--;)
{
for (int m = templeteWindowSize; m--;)
{
// computing color L2 norm
e += (*s - *t)*(*s - *t);
s++, t++;
}
t += cstep;
s += cstep;
}
const int ediv = e*tdiv;
ww[count--] = ediv;
//get weighted Euclidean distance
tweight += w[ediv];
}
}
//weight normalization
if (tweight == 0.0)
{
for (int z = 0; z<D; z++) nw[z] = 0;
nw[H] = 1;
}
else
{
double itweight = 1.0 / (double)tweight;
for (int z = 0; z<D; z++) nw[z] = w[ww[z]] * itweight;
}
double v = 0.0;
uchar* s = im.ptr(j + tr); s += (tr + i);
for (int l = searchWindowSize, count = 0; l--;)
{
for (int k = searchWindowSize; k--;)
{
v += *(s++)*nw[count++];
}
s += csstep;
}
*(d++) = saturate_cast<uchar>(v);
}//i
delete[] ww;
delete[] nw;
}//j
}
}
int main(int argc, char** argv)
{
//(1) Reading image and add noise(standart deviation = 15)
const double noise_sigma = 15.0;
Mat src = imread("C:/Users/heshiwen/Desktop/Lena.png", 1);
Mat snoise;
Mat dest;
addNoise(src, snoise, noise_sigma);
//(2) preview conventional method with PSNR
//(2-1) RAW
cout << "RAW: " << calcPSNR(src, snoise) << endl << endl;
//imwrite("noise.png", snoise);
//(2-2) Gaussian Filter (7x7) sigma = 5
int64 pre = getTickCount();
GaussianBlur(snoise, dest, Size(7, 7), 5);
cout << "time: " << 1000.0*(getTickCount() - pre) / (getTickFrequency()) << " ms" << endl;
cout << "gaussian: " << calcPSNR(src, dest) << endl << endl;
//imwrite("gaussian.png", dest);
imshow("gaussian", dest);
//(2-3) median Filter (3x3)
pre = getTickCount();
medianBlur(snoise, dest, 3);
cout << "time: " << 1000.0*(getTickCount() - pre) / (getTickFrequency()) << " ms" << endl;
cout << "median: " << calcPSNR(src, dest) << endl << endl;
//imwrite("median.png", dest);
imshow("median", dest);
//(2-4) Bilateral Filter (7x7) color sigma = 35, space sigma = 5
pre = getTickCount();
bilateralFilter(snoise, dest, 7, 35, 5);
cout << "time: " << 1000.0*(getTickCount() - pre) / (getTickFrequency()) << " ms" << endl;
cout << "bilateral: " << calcPSNR(src, dest) << endl << endl;
//imwrite("bilateral.png", dest);
imshow("bilateral", dest);
//(3) analizing of performance of Nonlocal means filter
pre = getTickCount();
nonlocalMeansFilter(snoise, dest, 3, 7, noise_sigma, noise_sigma);
cout << "time: " << 1000.0*(getTickCount() - pre) / (getTickFrequency()) << " ms" << endl;
cout << "nonlocal: " << calcPSNR(src, dest) << endl << endl;
//imwrite("nonlocal.png", dest);
imshow("original", src);
imshow("noise", snoise);
imshow("Non-local Means Filter", dest);
waitKey();
return 0;
}
运行结果如下























 1543
1543

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









