







 本文深入探讨了相机标定的重要性,从针孔相机模型开始,介绍了相机标定的基本概念、传统方法以及张正友标定法。详细阐述了相机标定的步骤,包括打印棋盘格、拍摄不同角度照片、提取角点、参数估计以及畸变校正。通过实验测试确保标定的准确性和精度。
本文深入探讨了相机标定的重要性,从针孔相机模型开始,介绍了相机标定的基本概念、传统方法以及张正友标定法。详细阐述了相机标定的步骤,包括打印棋盘格、拍摄不同角度照片、提取角点、参数估计以及畸变校正。通过实验测试确保标定的准确性和精度。
目录
一:针孔相机模型
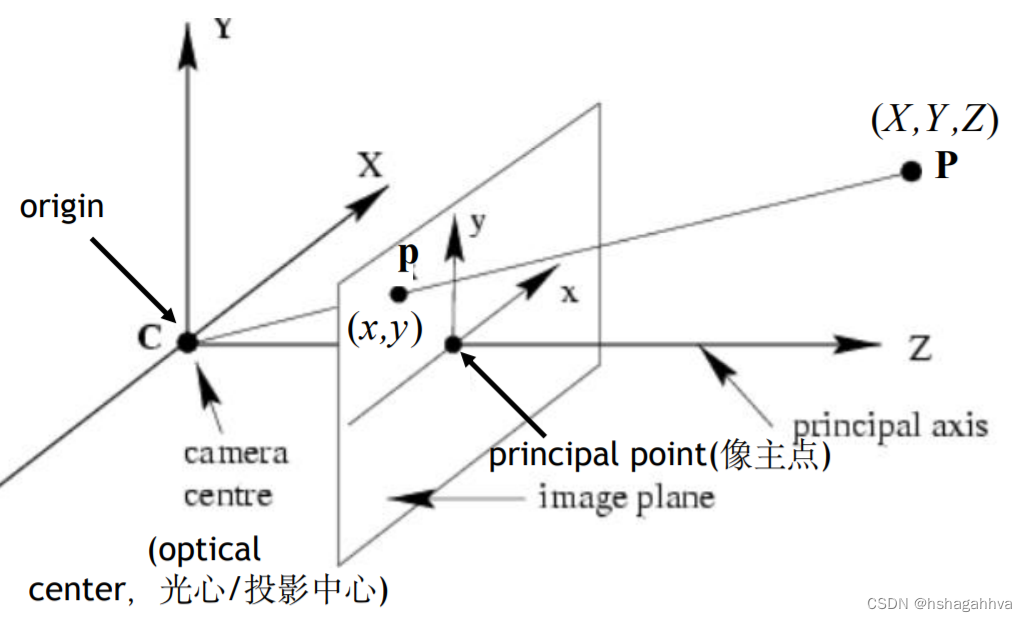
在针孔照相机模型中,在光线投影到图像平面之前,从唯一一个点经过,也就是照相机中心 C。根据相似三角形可以得出P点坐标和在投影面上坐标的关系
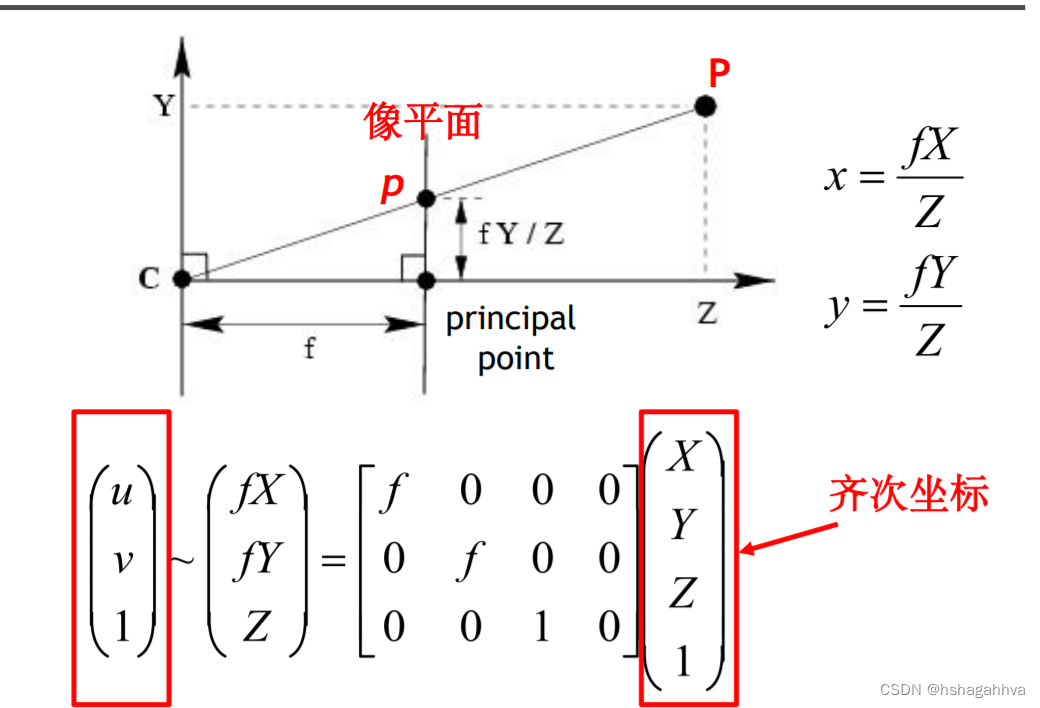
将坐标系改到像平面左下角时可以得到以下数据
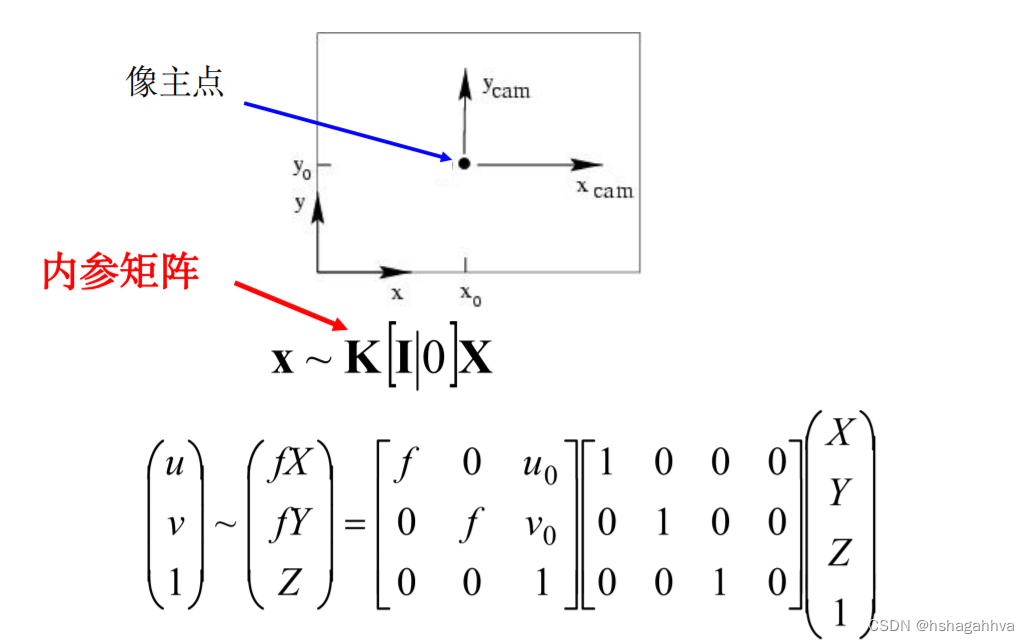
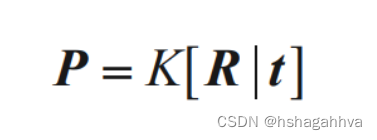
照相机可以分解成如下图所示,我们需要恢复内参数K和照相机的位置t和姿势R,矩阵分块操作成为因子分解。我们将使用RQ因子分解来进行矩阵因子分解。
from numpy import array, dot, hstack
import camera
K = array([[1000,0,500],[0,1000,300],[0,0,1]])
tmp = camera.rotation_matrix([0,0,1])[:3,:3]
Rt = hstack((tmp,array([[50],[40],[30]])))
cam = camera.Camera(dot(K,Rt))
print(K,Rt)
print(cam.factor())
二:相机标定
2.1相机标定介绍
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数(内参、外参、畸变参数)的过程就称之为相机标定。
畸变
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









