







STM32学习笔记:USART串口通信
一、原理讲解
1. 串口功能框图

1).引脚

TX:数据发送 RX:是数据接收
SCLK:时钟,仅同步通信时使用
nRTS:请求发送(Request To Send) nCTS:允许发送(Clear To Send)
2).数据寄存器
9位有效,包含一个发送数据寄存器TDR和一个接收数据寄存器RDR。一个地址对应了两个物理内存。
数据帧相关寄存器

| 寄存器 | 位 | 作用 |
|---|---|---|
| USART_CR1 | M(0:8bit,1:9bit) | 控制字长 |
| USART_CR2 | STOP | 控制停止位 |
| USART_CR1 | PCE、PS、PEIE | 使能校验、校验选择、PE中断使能 |
| USART_SR | PE | 校验错误 |
发送接收数据相关寄存器
| 步骤 | 寄存器 | 位 | 作用 |
|---|---|---|---|
| 打开(使能) | USART_CR1 | UE、TE、RE | USART、发送、接收使能 |
| 发送 | USART_SR | TXE(Transmit data register empty) | 发送数据寄存器为空标志位 |
| USART_CR1 | TXEIE | 发送缓冲区空中断使能 | |
| USART_SR | TC(Transmission complete) | 发送完成标志位 | |
| USART_CR1 | TCIE | 发送完成中断使能 | |
| 接收 | USART_SR | RXNE(Read data register not empty) | 读取数据寄存器非空标志位 |
| USART_CR1 | RXNEIE | 接收缓冲区非空中断使能 |
3).控制器
USART_CR1、CR2、CR3
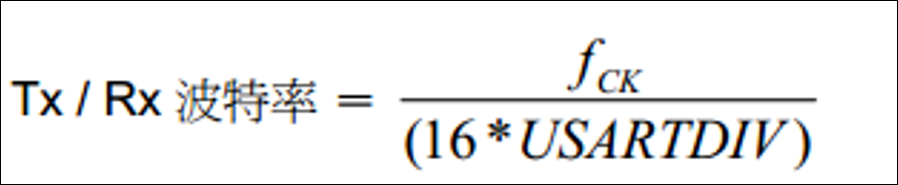
4).波特率
USART:USART1,时钟为72M
波特率:115200

二、所使用的函数
1.USART初始化函数(其主要功能就是利用结构体配置相应寄存器)
USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct)
2.USART使能函数
USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState)
3.发送数据函数
USART_SendData(USART_TypeDef* USARTx, uint16_t Data)
4.接收数据函数
USART_ReceiveData(USART_TypeDef* USARTx)
5.读取串口标志位函数
USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG)
6.清除串口标志位函数
USART_ClearFlag(USART_TypeDef* USARTx, uint16_t USART_FLAG)
三、代码编写过程
1.编写usart.h头文件
#ifndef __USART_H
#define __USART_H
#include "stm32f10x.h"
#include <stdio.h>
void Usart_Config(void);
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch);
void Usart_SendString( USART_TypeDef * pUSARTx, char *str);
void Usart_SendHalfWord( USART_TypeDef * pUSARTx, uint16_t ch);
#endif
2.编写usart.c文件
1).USART初始化函数
void Usart_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* 打开串口GPIO的时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
/* 打开串口外设的时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
/* 将USART Tx的GPIO配置为推挽复用模式 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 将USART Rx的GPIO配置为浮空输入模式 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 配置串口的工作参数 */
USART_InitStructure.USART_BaudRate = USART_BAUDRATE; //配置波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //配置针数据字长
USART_InitStructure.USART_StopBits = USART_StopBits_1; //配置停止位
USART_InitStructure.USART_Parity = USART_Parity_No ; //配置校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //配置硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //配置工作模式,收发一起
USART_Init(USART1, &USART_InitStructure); //完成串口的初始化配置
USART_Cmd(USART1, ENABLE); //使能串口
}
2).发送8bits数据的函数
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch)
{
USART_SendData(pUSARTx,ch);
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
3).发送字符串的函数
void Usart_SendString( USART_TypeDef * pUSARTx, char *str)
{
unsigned int k=0;
do
{
Usart_SendByte( pUSARTx, *(str + k) );
k++;
} while(*(str + k)!='\0');
while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET);
}
4).发送16bits数据的函数
void Usart_SendHalfWord( USART_TypeDef * pUSARTx, uint16_t ch)
{
uint8_t temp_h, temp_l;
temp_h = (ch&0XFF00)>>8; //取高8位然后右移
temp_l = ch&0XFF; //取低8位
USART_SendData(pUSARTx,temp_h);
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
USART_SendData(pUSARTx,temp_l);
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
5).重定向函数(使用printf,scanf等函数的配置)
这个重定向需要使用微库MicroLIB所以在options for target里面的target一栏里记得勾选use MicroLIB一项
///重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
return (ch);
}
///重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)
{
while (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(USART1);
}
3.编写main.c文件
int main(void)
{
char ch;
/****测试LED灯以及蜂鸣器是否正常工作****/
Usart_Config();
Beep_Init();
LED_Iint();
delay_init();
GPIO_ResetBits(GPIOB,GPIO_Pin_5);
GPIO_ResetBits(GPIOE,GPIO_Pin_5);
delay_ms(100);
GPIO_SetBits(GPIOB,GPIO_Pin_8);
delay_ms(100);
GPIO_SetBits(GPIOB,GPIO_Pin_5);
GPIO_SetBits(GPIOE,GPIO_Pin_5);
GPIO_ResetBits(GPIOB,GPIO_Pin_8);
delay_ms(100);
printf("工作正常!\r\n");
/****串口部分函数****/
while(1)
{
ch=getchar();
delay_ms(100);
printf("接收到字符:%c\r\n",ch);
switch(ch)
{
case '1':
GPIO_ResetBits(GPIOB,GPIO_Pin_5); //打开LED0
break;
case '2':
GPIO_ResetBits(GPIOE,GPIO_Pin_5); //打开LED1
break;
case '3':
GPIO_SetBits(GPIOB,GPIO_Pin_8); //打开蜂鸣器
break;
case '4':
GPIO_SetBits(GPIOB,GPIO_Pin_5);
GPIO_SetBits(GPIOE,GPIO_Pin_5);
GPIO_ResetBits(GPIOB,GPIO_Pin_8); //所有的都将其关闭
break;
}
}
}
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











