






四轮独立驱动汽车自动轨迹跟踪+横向稳定性控制是一项基于CarSim与Simulink联合的控制技术。它的控制目标是实现对给定轨迹的跟踪,并在跟踪过程中保持汽车的横向稳定性。本文将介绍该技术的设计原理、控制器结构和实现方法。
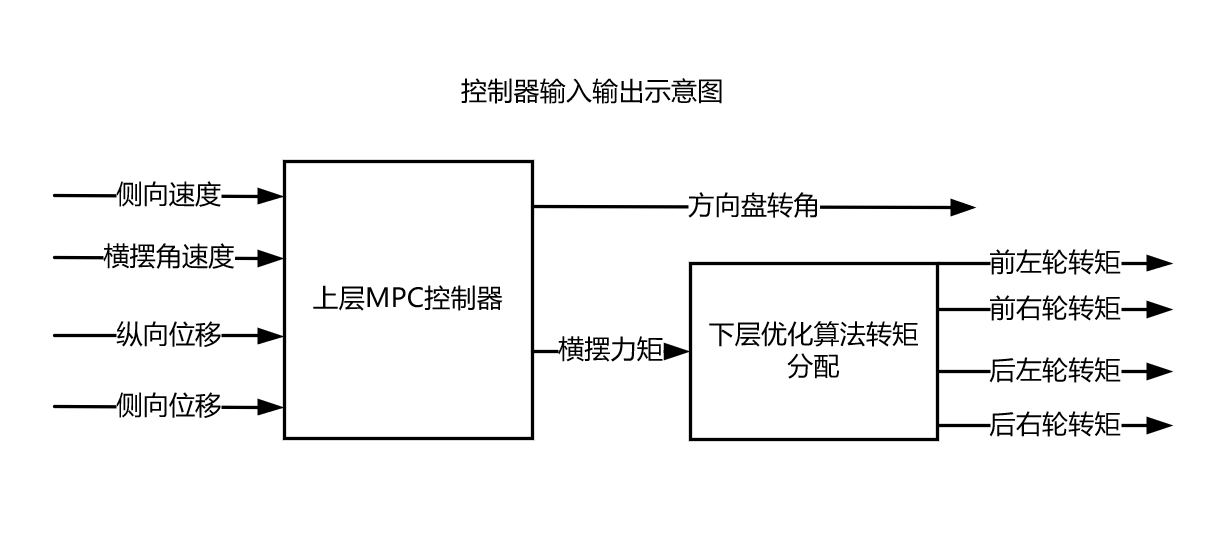
在该技术中,上层控制器采用了模型预测控制(MPC)的方法。MPC控制器输出的是附加的横摆力矩和方向盘转角。为了实现对给定轨迹的跟踪,该控制器需要对车辆进行控制,使其在给定轨迹上保持运动。同时,为了保持横向稳定性,控制器还需要调节横摆力矩和方向盘转角,使车辆能够在转弯时保持平稳。
为了实现MPC控制器的设计,本文采用了二自由度车辆模型。该模型考虑了车辆的横向和纵向动力学,能够更准确地描述车辆的转弯和加速特性。基于该模型,我们可以通过代码编写实现MPC控制器。MPC控制器的原理非常明了,可以通过对控制算法的推导过程进行理解。
在实际应用中,将MPC问题转化为二次规划(QP)方法来求解是一种常用的做法。二次规划是一种寻找最小二乘解的方法,可以有效地解决MPC控制器中的优化问题。本文将详细介绍如何将MPC问题转化为二次规划,并给出相应的求解方法。
在下层控制器中,采用了基于优化控制的转矩分配方法。该方法可以根据车辆当前的状态和控制需求,自动调节每个轮子所施加
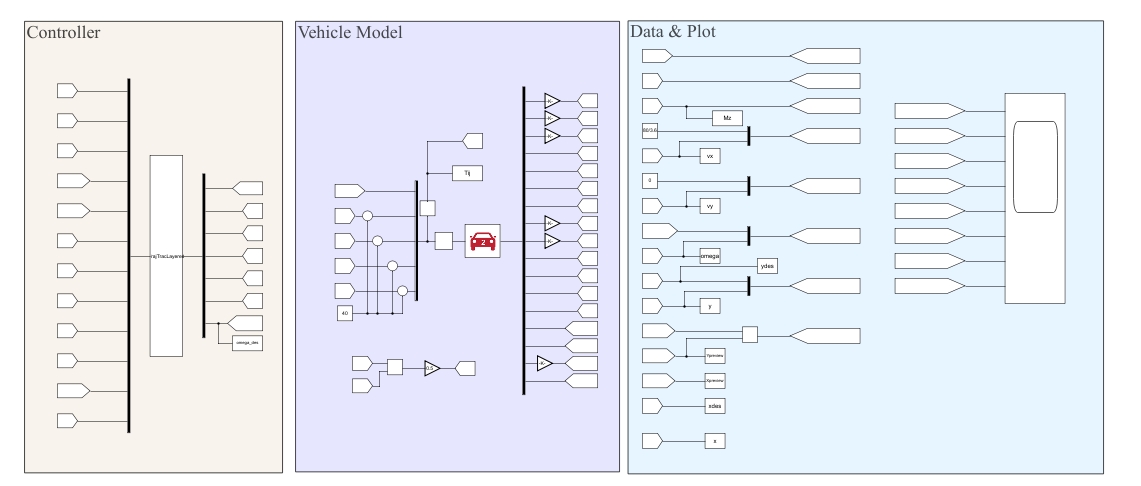
四轮独立驱动汽车自动轨迹跟踪+横向稳定性控制 CarSim与Simulink联合
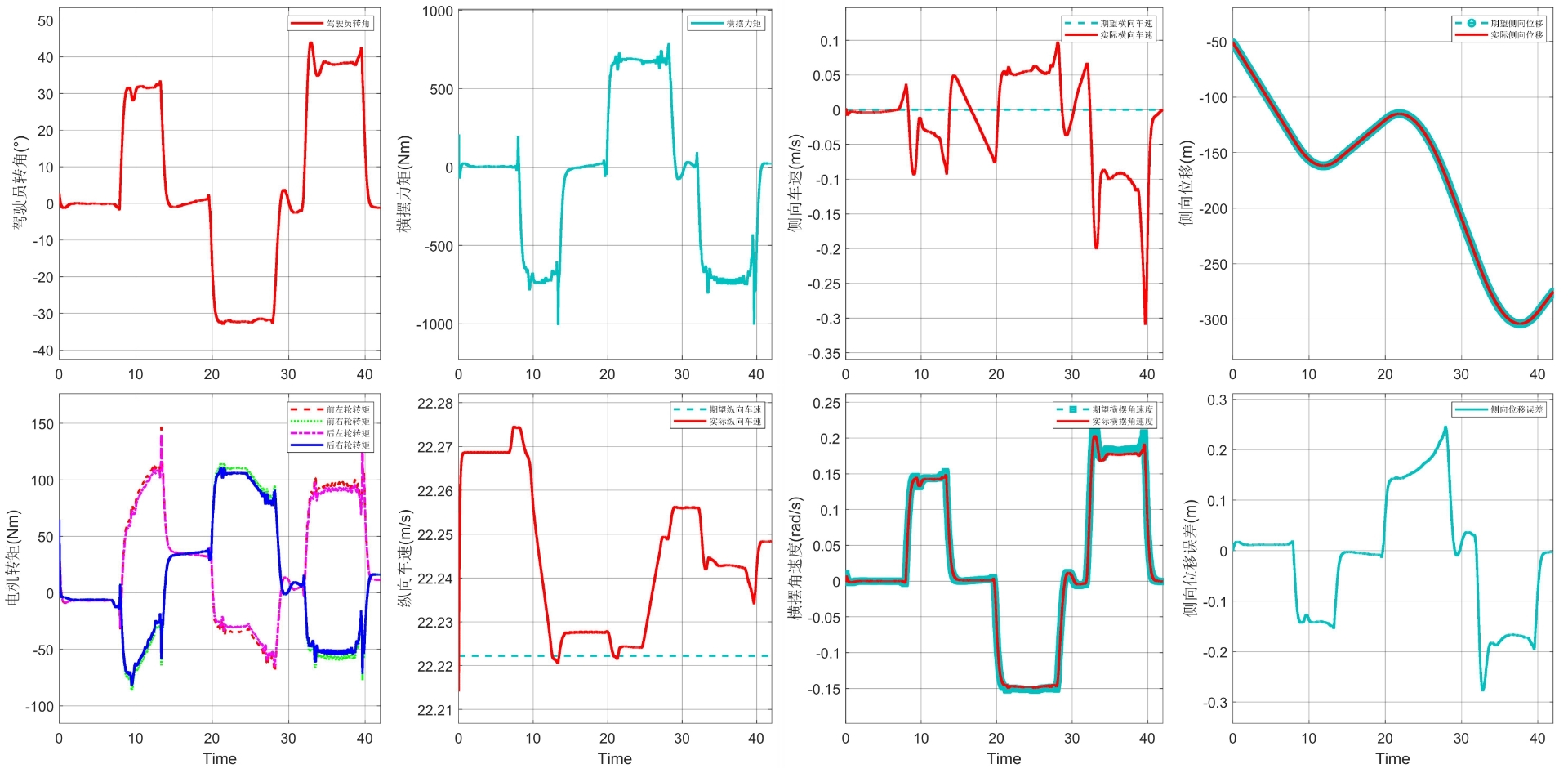
控制目标为对给定轨迹进行跟踪(不带轨迹规划)同时进行横向稳定性控制
上层控制器为MPC控制器,输出为附加横摆力矩和方向盘转角,采用了二自由度车辆模型
MPC控制器采用代码编写,原理一目了然
将MPC问题转化为了二次规划方法求解
下层为基于优化控制的转矩分配
带有完整详细的推导文档
可通过该模型学习:★MPC控制★将MPC转化为二次规划的方法★轨迹跟踪控制★MATLAB中二次规划和非线性规划的命令使用方法
MATLAB版本为2018b CarSim版本为2018



















 422
422

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









