






MATLAB基于领航追随法的车辆编队控制,领航追随者与人工势场法的简单融合实现避障
YID:5145771257394948
一無所有`


【基于MATLAB的车辆编队控制与障碍避让——融合领航追随法与人工势场法】
遥控未来:智能车辆的领航与避障
在科技日新月异的今天,自动驾驶技术正逐渐成为我们生活的一部分。本文将介绍一种在MATLAB环境中,使用领航追随法结合人工势场法,实现的车辆编队控制及避障策略。
场景描绘
想象一下,一群智能车辆在复杂的城市环境中行驶,它们不仅要保持一定的编队队形,还要灵活地避开路上的障碍物。这就是我们今天要探讨的课题——基于MATLAB的车辆编队控制与避障技术。
领航追随法的应用
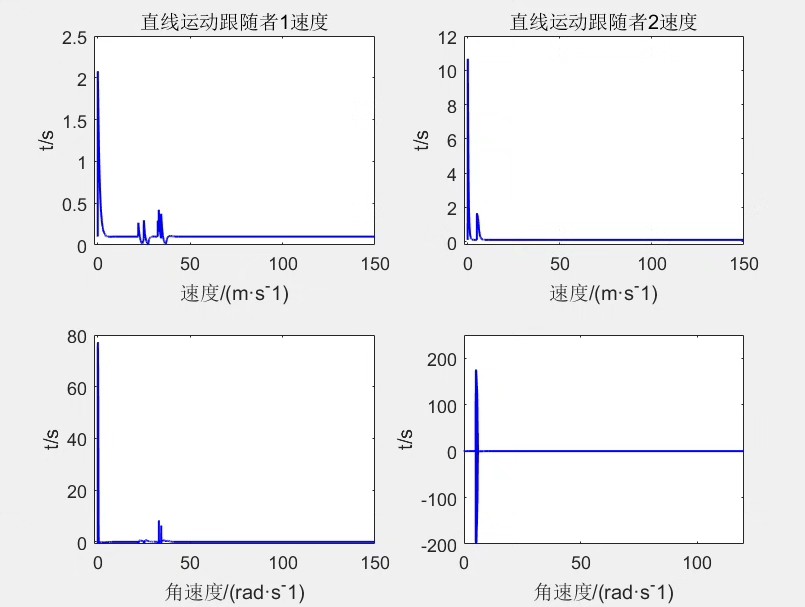
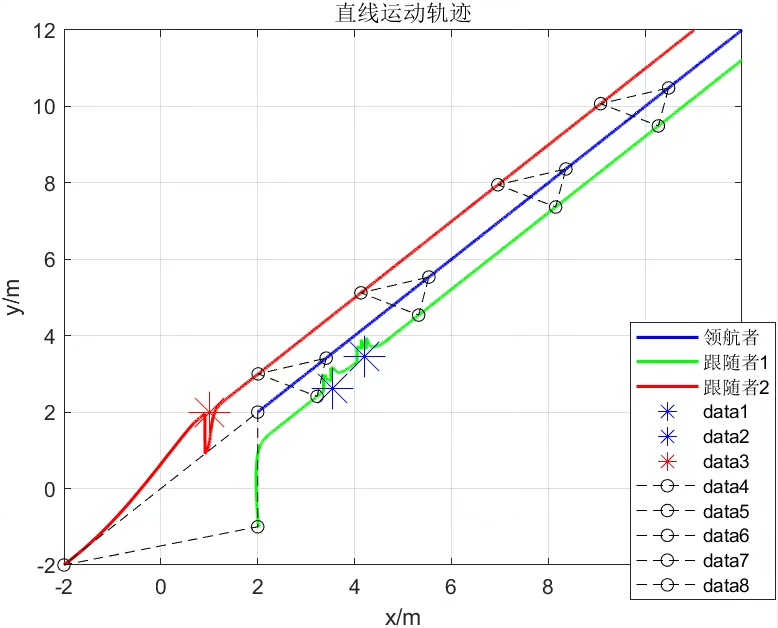
领航追随法是一种常用的编队控制策略。在这种方法中,每辆车的运动状态都受到前车的引导和本车周围车辆的反馈影响。在MATLAB中,我们可以建立模型来模拟这种策略,使得车辆之间能够保持稳定的队形,从而确保整个编队的协同运动。
示例代码:
% 假设已有车辆的位置和速度信息,此处省略具体实现细节
% 领航追随法算法实现
for each vehicle in the formation
if vehicle is not the leader
follow_leader(vehicle_position, leader_position) % 跟随领航者移动
adjust_formation(vehicle_speed, surrounding_vehicles) % 调整与周围车辆的相对位置和速度
end
end
人工势场法的融合实现
然而,仅仅依靠领航追随法还不足以应对所有情况。当遇到障碍物时,车辆需要能够及时避障。人工势场法是一种有效的避障策略。它通过模拟物理世界中的势场,为车辆生成避障的引导路径。将这种方法与领航追随法相结合,可以实现更加智能化的车辆控制。
在MATLAB中,我们可以模拟这样一个:当车辆接近障碍物时,人工势场法会生成一个指向安全区域的力,引导车辆避开障碍物;同时,领航追随法则确保车辆在避障的同时,仍然能够保持编队的队形。
示例代码(简略):
% 人工势场法算法实现(此处为简略描述)
avoid_obstacle(vehicle_position, obstacle_position) % 计算避障力
vehicle_force = combine_force(follow_leader_force, avoid_obstacle_force) % 结合领航追随力和避障力,生成总的控制力
control_vehicle(vehicle, vehicle_force) % 根据总控制力控制车辆的行驶
结论与展望
通过在MATLAB中融合领航追随法和人工势场法,我们可以实现智能车辆的编队控制和障碍避让功能。这种方法不仅提高了车辆的行驶安全性,还增强了编队的协同性和灵活性。随着自动驾驶技术的不断发展,我们期待这种技术能够在更多场景中得到应用。
每次写作时,可以根据具体情境和需求调整文章的结构、语气和角度。比如,可以更多地描述技术细节、分析算法的优劣、分享实际应用案例等。这样不仅可以使文章风格各异,还能增加文章的深度和广度。
















 3503
3503

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









