







目录
声明:部分摘抄自维基百科。
一、三维笛卡尔坐标系
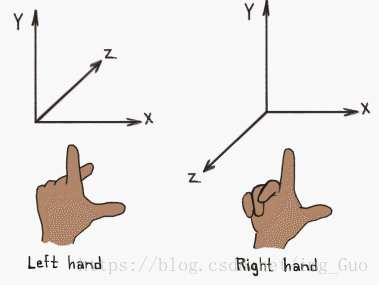
所有二维笛卡尔坐标系都是等价的(可以通过旋转进行统一),但是三维笛卡尔坐标系并不都是等价的。如果两个坐标系具有相同的旋向性,那么我们就可以通过旋转的方法让两个坐标轴指向重合,但是如果它们不具备相同的旋向性,那么我们就不可以通过单纯的旋转的方法来让它们重合(如 左手坐标系和右手坐标系)。
1.1 左右手坐标系判断
除了用左右手判断以外,还可以判断前向(forward):
坐直,右面的方向时X轴方向,头顶方向时Y轴方向,如果正前方时Z轴正方向,那就是左手坐标系;如果正前方是Z轴负方向,那就是右手坐标系。
1.2 左右手坐标系旋转正方向判断
左手坐标系旋转正方向由左手法则定义,右手坐标系旋转正方由右手法则定义。
1. 左手法则:伸出左手,握拳,伸出大拇指让它指向旋转轴正方向,那么四个手指弯曲方向为旋转正方向(顺时针方向)。
2. 右手法则:伸出右手,握拳,伸出大拇指让它指向旋转轴正方向,那么四个手指弯曲方向为旋转正方向(逆时针方向)。
1.3 其它
1. 左右手坐标系是可以相互转换的,最简单的方法是保持两个坐标轴不变,把其中一个轴反转。注意,在左手坐标系和右手坐标系中,相同的点运动轨迹,两个坐标系之间的数学描述不同。想要在两个坐标系之间进行变换,参见《Conversion of Left-Handed Coordinates to Right-Handed Coordinates》。
2. Unity使用的坐标系
对于世界空间和模型空间:Unity使用左手坐标系;
对于观察空间(以摄像机为原点的坐标空间):右手坐标系,摄像机前向是Z轴的负方向、Z轴值越小,物体的深度越大,离摄像机越远。
二、点和矢量
1. 点是n维空间中的一个位置,没有大小、宽度等概念,在笛卡尔坐标系中可以使用2个或者3个实数来表示一个点的坐标;
2. 矢量是n维空间中一种包含了模和方向的有向线段,矢量没有位置;
3. 通常,矢量被用于表示相对于某个点的偏移,也就是说是一个相对量,只要知道矢量端点(尾或头)的一个位置,就可以知道矢量另一个端点(头或尾)代表的位置了。只要矢量的模和方向保持不变,无论放在哪里都是同一个矢量。
三、矢量运算
3.1 矢量和标量的乘/除法
公式很简单,只需要把矢量的每一个分量和标量相乘/除即可。
3.2 矢量的加减法
计算只需要把两个矢量对应分量进行相加减即可,对应的几何层次上的法则是三角形定则。
PS:图形学中要时刻谨记,图形学中矢量通常用于描述偏移(简称位移)。因此我们可以利用数量的加减法来计算一点相对于另一点的位移。例如,假设空间中有两点a和b,我们可以用矢量a和b表示它们相对于原点的位移,如果我们想要计算点b相对于点a的位移,我们可以通过b-a得到。
3.3 矢量的模
矢量的模是一个标量,可以理解为矢量在空间中的长度。各个维度矢量模的计算都是类似的,都是对每个分量的平方相加后再开根号得到。
还有一种方法可以求一个矢量的模,可以利用矢量与自身的点积结果开平方。
3.4 单位矢量
很多情况下,我们只关注矢量的方向而不是模,在这种情况下我们就需要使用单位矢量。比如说计算光照模型时候,我们往往需要得到顶点的法线方向和光源方向,此时我们不关注矢量有多长。
单位矢量:模为1的矢量;
归一化矢量:对任何给定的非零矢量,把它转换成单位矢量的过程就被称为归一化,计算公式为矢量除以矢量的模。其中,零矢量不能被归一化,因为除法运算分母不能为0。
3.5 矢量的点积(内积)— 标量
从代数角度看,先对两个数字序列中的每组对应元素求积,再对所有积求和,结果即为点积。从几何角度看,点积则是两个向量的长度与它们夹角余弦的积(也就是投影)。这两种定义在笛卡尔坐标系中等价。
3.5.1 代数角度:

3.5.2 几何角度:
几何角度下的点积意义很重要,其中一个比较重要的意义就是投影。

这样,两个互相垂直的向量的点积总是零。若两个向量都是单位向量(长度为1),它们的点积就是它们的夹角的余弦。倘若任意给定两个向量,它们之间的夹角可以通过下列公式得到:

这个运算可以简单地理解为:在点积运算中,第一个向量投影到第二个向量上(这里,向量的顺序是不重要的,点积运算是可交换的),然后通过除以它们的标量长度来“标准化”。这样,这个分数一定是小于等于1的,可以简单地转化成一个角度值。
例如:假设有一个单位矢量a和另一个长度不限的矢量b,现在我们希望得到b在平行于a的一条直线上的投影。那么我们就可以使用点积来表示b在a方向上的影子。
3.5.3 两矢量方向判定
点积结果的符号可以判定两个矢量间的关系。方向相反,点积小于0;方向垂直,点积等于0;方向相同,点积大于0。
3.5.4 点积的性质
1、 满足交换律
2、 满足分配律(即点积可以结合矢量加减法)
3、 点积可结合标量乘法
也就是说,对点积中其中一个矢量进行缩放的结果,相当于对最后的点积结果进行缩放。
4、 矢量与本身进行点积的结果,是该矢量模的平方
这个性质的第一点就是可以不用求模公式求矢量的模,当然,更重要的一点是当我们想要比较两个矢量模(长度)的大小,我们可以直接比较点积的结果。
3.6 矢量的叉积(外积)— 向量
与点积不同,它的运算结果是向量。对于线性无关的两个向量 


如果两个向量方向相同或相反(即它们非线性无关),亦或任意一个的长度为零,那么它们的叉积为零向量。推广开来,叉积的模长和以这两个向量为边的平行四边形的面积相等;如果两个向量成直角,它们叉积的模长即为两者长度的乘积。
3.6.1 叉积的计算
1、 模长:![]()
2.、方向:左手坐标系用左手判断,右手坐标系用右手判断。
【举例】假设两个矢量 
3.6.2 叉积的用处
最常见的用处就是计算垂直于一个平面、三角形的矢量。另外,还可以判断三角面片的朝向。















 1104
1104











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









