






主站通过SDO修改从站心跳时间的详细指南
一、CANopen心跳机制概述
在CANopen协议中,心跳机制是保证网络可靠性的核心功能:
心跳生产者:从站设备定期发送心跳报文
心跳消费者:主站设备监控心跳报文
心跳时间:由对象字典索引 0x1017 定义(子索引0),单位为毫秒
超时处理:主站检测到心跳超时可触发从站复位或错误处理
二、配置步骤
- 从站对象字典配置
在 objdictedit 中配置心跳时间参数:
python
添加心跳时间对象字典项
AddEntry(
index=0x1017,
subindex=0,
name="Heartbeat Time",
objecttype=0x7, # VAR类型
datatype=0x0006, # UNSIGNED16
access="rw", # 读写权限
default=1000 # 默认1000ms
)
- 主站SDO写操作原理
主站通过SDO修改心跳时间的数据结构:
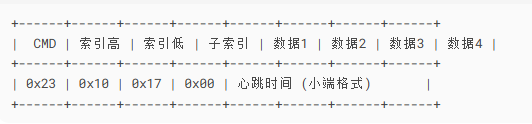
CMD:0x23 表示快速SDO写(4字节数据)
索引:0x1017
子索引:0x00
数据:16位心跳时间值(小端格式)
三、代码实现示例
主站端代码(C语言)
c
#include <canfestival.h>
// 修改从站心跳时间函数
void set_heartbeat_time(CO_Data* d, UNS8 node_id, UNS16 time_ms)
{
UNS32 abort_code = 0;
UNS8 data[4] = {0};
// 将心跳时间转换为小端格式
data[0] = time_ms & 0xFF; // 低字节
data[1] = (time_ms >> 8) & 0xFF; // 高字节
// 发送SDO写请求
UNS8 res = SDOwrite(d, node_id,
0x1017, 0x00, // 索引和子索引
sizeof(data), data,
0, // 无大小指示
0, // 块传输禁用
&abort_code);
if (res != SDO_SUCCESS) {
printf("SDO write failed! Error: 0x%08lX\n", abort_code);
} else {
printf("Heartbeat time set to %d ms for node %d\n", time_ms, node_id);
}
```c
}
// 主程序示例
int main()
{
// 初始化CANopen主站
canOpen(&master_data);
// 设置节点2的心跳时间为500ms
set_heartbeat_time(&master_data, 2, 500);
// 设置节点3的心跳时间为2000ms
set_heartbeat_time(&master_data, 3, 2000);
while(1) {
// 主循环处理
canReceive(&master_data);
}
return 0;
}
从站端处理(自动由CanFestival处理)
从站协议栈会自动处理SDO写入并更新心跳定时器:
```c
c
```c
// CanFestival内部处理逻辑(简化)
void _storeOD(CO_Data* d, UNS16 index, UNS8 subindex)
{
if(index == 0x1017 && subindex == 0) {
// 获取新心跳时间值
UNS16 hb_time = * (UNS16*)d->objdict->OD[index].pSubindex[subindex].pObject;
// 更新心跳定时器
setTimer(&d->heartbeatTimer, hb_time);
// 重启心跳生产
restartHeartbeat(d);
}
}
## 四、完整工作流程
1.主站发起SDO写请求
构造SDO报文:索引0x1017,子索引0x00
包含新的心跳时间值(小端格式)
通过CAN总线发送到目标从站
2.从站接收并处理SDO
验证SDO访问权限(RW权限)
检查数据范围(典型值100-65535ms)
更新对象字典值
触发 _storeOD 回调函数
3.从站更新定时器
停止当前心跳定时器
使用新值重新配置定时器
重启心跳报文发送
4.主站确认修改
接收SDO成功响应(空报文)
监控新的心跳报文间隔
更新心跳超时检测逻辑
## 五、关键注意事项
1.取值范围
最小值:通常不小于100ms(避免总线过载)
最大值:不超过65535ms(约65秒)
0值:禁用心跳(不推荐)
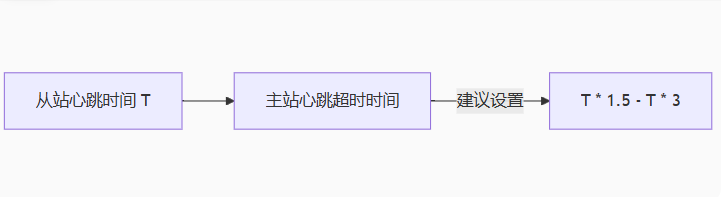
2.超时时间关系
图表
代码
3.错误处理
SDO中止代码:
0x06010000:不支持访问
0x06090011:子索引不存在
0x06070010:数据类型不匹配
0x06090030:超出范围值
超时处理:
c
```c
```c
// 主站心跳超时回调 void heartbeatTimeout(CO_Data* d, UNS8 node_id) { printf("Node %d heartbeat timeout!\n", node_id); // 触发从站复位或错误处理 sendNMTcommand(d, node_id, NMT_Reset_Node); }
## 六、调试技巧
日志监控
主站日志:记录所有SDO请求/响应
从站日志:记录对象字典修改事件
CAN分析仪捕获
过滤SDO报文:ID=0x600 + 节点ID (请求),0x580 + 节点ID (响应)
示例报文:
请求: 23 17 10 00 00 02 00 00 // 设置500ms (0x01F4)
响应: 60 17 10 00 00 00 00 00 // 成功响应
实时验证
使用 objdictedit 连接从站查看对象字典
通过主站读取 0x1017 值确认修改
## 七、进阶应用
动态调整策略
c
```c
// 根据网络负载动态调整心跳
void adjust_heartbeat(CO_Data* d, UNS8 node_id, float load_factor)
{
UNS16 current_time = read_heartbeat_time(d, node_id);
UNS16 new_time = current_time * (1.0 + load_factor);
// 限制在有效范围内
new_time = (new_time < 100) ? 100 : new_time;
new_time = (new_time > 5000) ? 5000 : new_time;
set_heartbeat_time(d, node_id, new_time);
}
多节点批量配置
c
void set_all_heartbeats(CO_Data* d, UNS16 time_ms)
{
for(UNS8 i = 1; i <= MAX_NODES; i++) {
if(node_exists(d, i)) { // 检查节点在线
set_heartbeat_time(d, i, time_ms);
}
}
}
心跳与节点保护结合
c
// 配置节点保护时间(索引0x100C)
void configure_node_guarding(CO_Data* d, UNS8 node_id)
{
// 设置保护时间 = 心跳时间 * 2
UNS16 hb_time = read_heartbeat_time(d, node_id);
set_guard_time(d, node_id, hb_time * 2);
}
通过SDO修改心跳时间是CANopen网络管理的基础操作,合理配置可显著提高系统可靠性。建议在系统启动阶段设置初始值,并在运行中根据网络状态动态调整。



















 478
478

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











