







 本文详细介绍了机器视觉中的相机标定过程,包括四大坐标系的转换,从{world}到{pixel}的坐标变换,以及摄像机的内外参数。同时,文章还探讨了摄像机畸变的类型,如径向畸变和切向畸变,以及对应的数学模型和校正方法。通过理解这些概念,可以更好地进行图像矫正和三维重建。
本文详细介绍了机器视觉中的相机标定过程,包括四大坐标系的转换,从{world}到{pixel}的坐标变换,以及摄像机的内外参数。同时,文章还探讨了摄像机畸变的类型,如径向畸变和切向畸变,以及对应的数学模型和校正方法。通过理解这些概念,可以更好地进行图像矫正和三维重建。
文章目录
1 摄像机标定
- 摄像机标定目的:建立世界坐标中三维点与像素坐标系中二维点的相关关系。
- 针孔模型:摄像机的线性模型是在理想情况下的成像模型,即光学中的中心投影,我们通常也称为针孔模型。
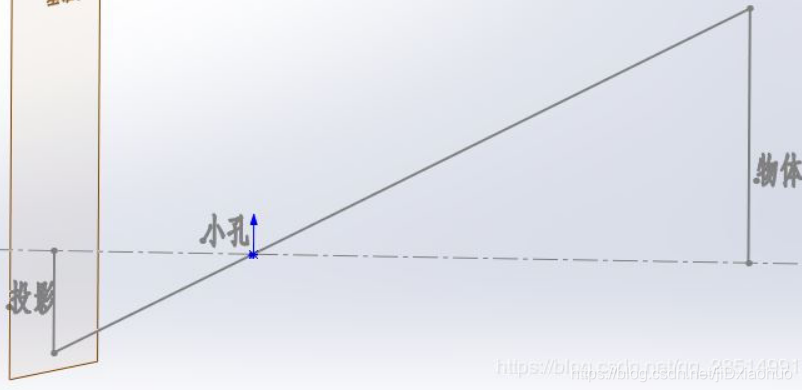
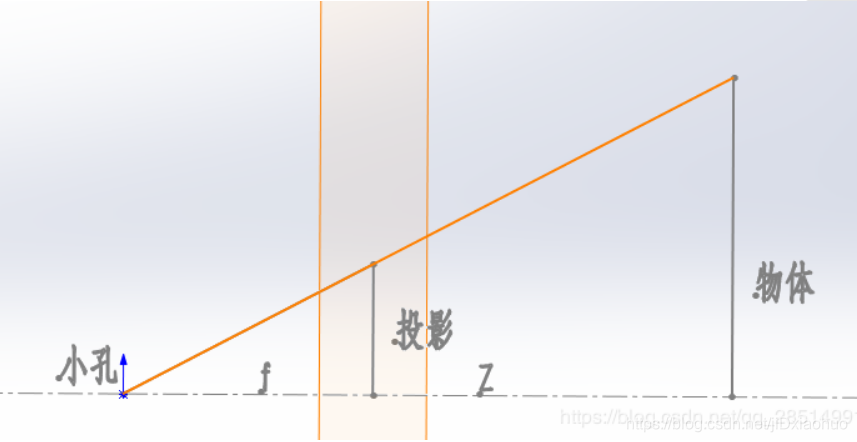
如果按照实际的投影关系建立坐标系,那么投影坐标和物体坐标的符号总是相反的,考虑起来不太方便,于是在“数学上”把投影平面平移到其关于小孔对称的位置,这样投影坐标和物体坐标符号就相同了,示意图如下:
1.1 四大坐标系
在视觉测量中,需要进行的一个重要预备工作是定义四个坐标系的意义,即世界坐标系、摄像机坐标系 、 图像坐标系、 像素坐标系 。
- {world},{camera},{picture}和{pixel}坐标系的坐标用下标来区分,分别是W,c,p,pix
- {world},{camera},{picture}坐标系单位为长度,一般为mm;{pixel}坐标系单位为像素,一般为pix
- {world}坐标系为世界坐标系,可以任意指定,其他坐标系都有明确的定义
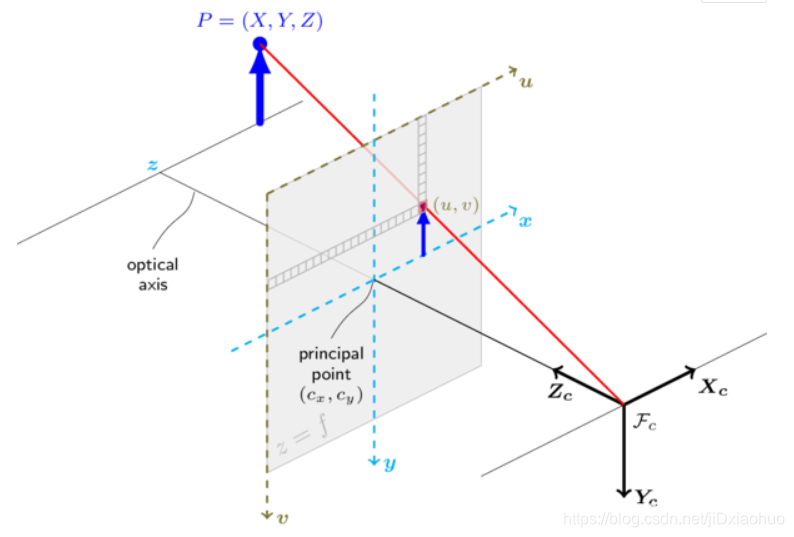
- {camera}坐标系为摄像机坐标系,原点在小孔的位置,z轴与光轴重合,Xc轴和Yc轴分别和投影面两边平行
- {picture}坐标系为图像坐标系,光轴和投影面的交点为原点,Xp轴和Yp轴分别和投影面两边平行
- {pixel}坐标系为像素坐标系,从小孔向投影面方向看,投影面的左上角为原点Opix,uv轴和投影面两边重合
1.2 坐标系转换
1.2.1 {world}到{camera}
设某点在{world}坐标系中的坐标为
,
该点在{camera}坐标系中的坐标为
,
则有
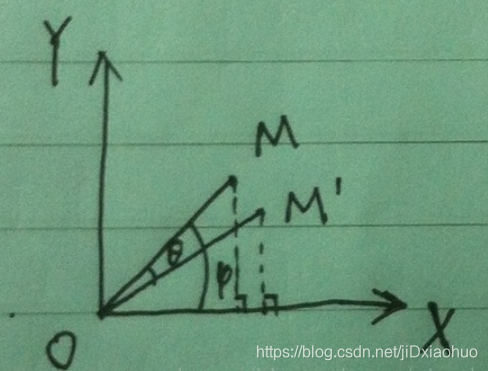
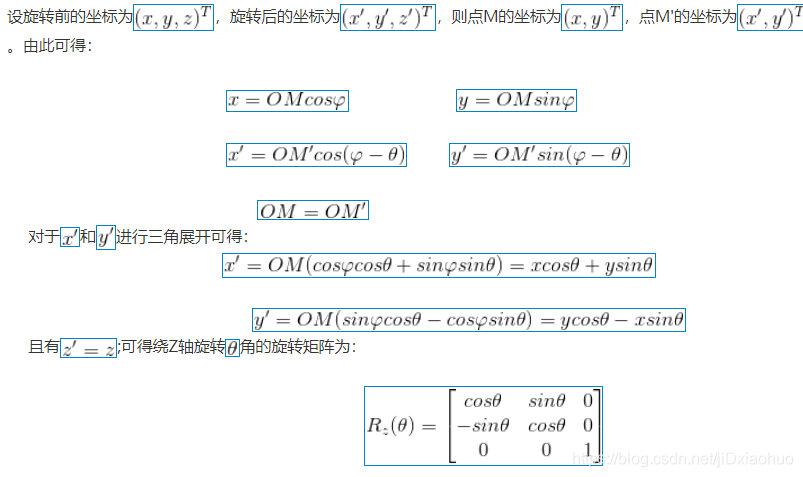
其中R是正交旋转矩阵:
Rx Ry Rz 分别为矩阵沿着对应轴的旋转矩阵
具体推导公式列出一个 其他同理
T是平移矩阵:
为各个方向上的位移偏移量
确定R需要3个参数,确定T需要3个参数,共需6个参数,这6个参数称为摄像机的外部参数。(在单目相机中外参没有多少意义。只有在双目相机中,以另一个摄像头为坐标系,得出的相对另一个摄像头的旋转和平移矩阵才有实际意义)
1.2.2 {camera}到{picture}
设空间点 X c X_{c} Xc在{camera}下: P c = [ x c , y c , z c , 1 ] T P_{c}=\left [ x_{c},y_{c},z_{c},1 \right ]^{T}
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 800
800

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











