







电子技术——伯德图与反馈

增益和相位边距
从上两节我们知道环路增益 A β A\beta Aβ 可以决定一个系统的稳定性,一个更加简单和有效的方法是我们可以绘制 A β A\beta Aβ 的伯德图(因为相位可以达到360度,因此这是一个四阶响应系统):
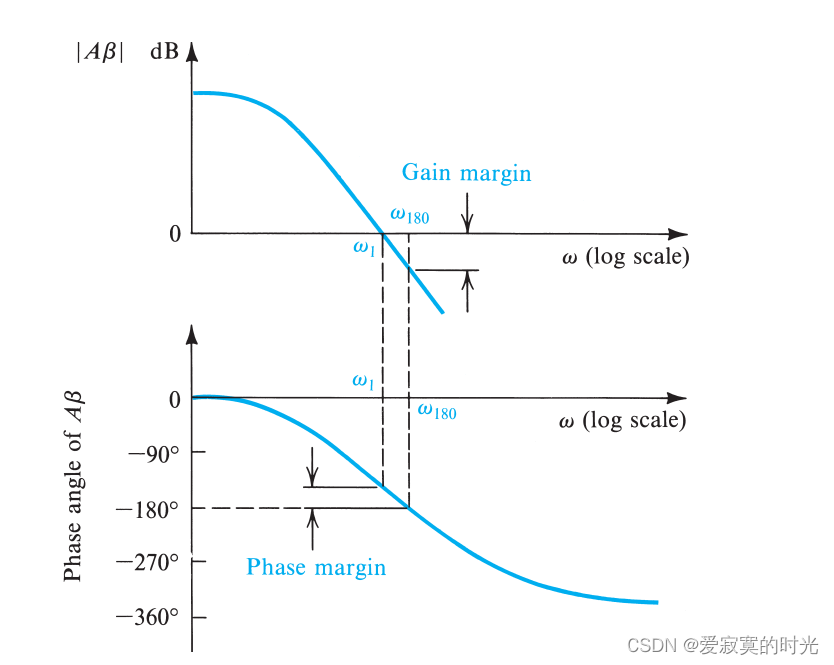
上图中的负反馈网络是稳定的,因为在其180度相移点
ω
180
\omega_{180}
ω180 的地方,对应的幅值小于单位一,我们称此时的幅值到单位一的间距称为 增益边距 ,通常使用分贝单位。增益边距表明在系统变得不稳定之前还能增加的闭环增益,在设计反馈放大器中,通常留出足够的增益边距,为了让外界因素(如温度)对闭环增益的影响起到缓冲作用。
另外,如果一个系统是稳定的,那么在其 ∣ A β ∣ |A\beta| ∣Aβ∣ 大于一的部分,此时对应的相位差应该小于 180 180 180 度,也就是说,在单位增益点 ω 1 \omega_1 ω1 的地方对应的频率应该大于 − 180 -180 −180 ,此时我们记其到 − 180 -180 −180 的距离为 相位边距 。
相位边距对闭环响应的影响
一般的反馈放大器设计中,都让其相位边距大于45度。为了说明相位边距对闭环响应的影响,我们假设一个理想的闭环反馈 A 0 β ≫ 1 A_0\beta \gg 1 A0β≫1 此时的中频闭环响应为 1 / β 1/\beta 1/β 。我们可以将单位增益出的环路增益写作:
A ( j ω 1 ) β = 1 × e − j θ A(j\omega_1) \beta = 1 \times e^{-j\theta} A(jω1)β=1×e−jθ
这里:
θ = 18 0 ∘ − p h a s e m a r g i n \theta = 180^\circ - phase\ margin θ=180∘−phase margin
带入:
A f ( j ω 1 ) = ( 1 / β ) e − j θ 1 + e − j θ A_f(j\omega_1) = \frac{(1 / \beta)e^{-j\theta}}{1 + e^{-j\theta}} Af(jω1)=1+e−jθ(1/β)e−jθ
则其大小为:
∣ A f ( j ω 1 ) ∣ = 1 / β ∣ 1 + e − j θ ∣ |A_f(j\omega_1)| = \frac{1/\beta}{|1 + e^{-j\theta}|} ∣Af(jω1)∣=∣1+e−jθ∣1/β
带入 θ = 18 0 ∘ − 4 5 ∘ \theta = 180^\circ - 45^\circ θ=180∘−45∘ :
∣ A f ( j ω 1 ) ∣ = 1.3 1 β |A_f(j\omega_1)| = 1.3 \frac{1}{\beta} ∣Af(jω1)∣=1.3β1
这说明此时的增益是中频增益的1.3倍。相位边距越小,这个值就越大,最终当相位边距为零的时候,这个值为无穷,此时系统是不稳定的。
另外一种分析方法
有时候若想分析多种 β \beta β 对放大器的影响,我们可以先单独绘制出 A ( s ) A(s) A(s) 的伯德图,现在假设 β \beta β 与频率无关,此时再绘制直线 20 log 1 β 20\log\frac{1}{\beta} 20logβ1 两个图像的差值即为闭环增益:
20 log ∣ A ( j ω ) ∣ − 20 log 1 β = 20 log ∣ A β ∣ 20 \log|A(j\omega)| - 20 \log \frac{1}{\beta} = 20 \log|A\beta| 20log∣A(jω)∣−20logβ1=20log∣Aβ∣
如图:
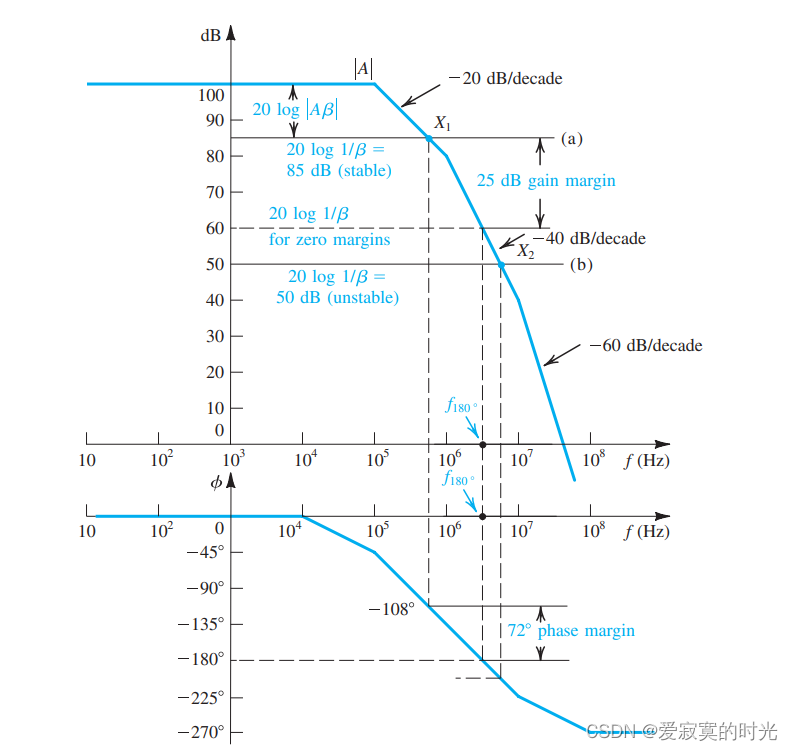
此时单位频率点就是两个曲线的交点,如图上面的曲线(a)对应的负反馈放大器是稳定的,而(b)则是不稳定的。
一般根据经验来说,相位差在180度时总是发生在-40dB/decade的区间中,我们需要保证两个直线的交点在-20dB/decode中(称为 关闭斜率 ),就基本可以保证负反馈放大器是稳定的,并且留有大于45度的相位边距。















 605
605











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









