







hdl-graph-slam是一个较为经典的3d 激光slam开源算法,其代码架构简洁,且调用通用Eigen和g2o库进行核心运算,非常适合对slam整个架构的学习。
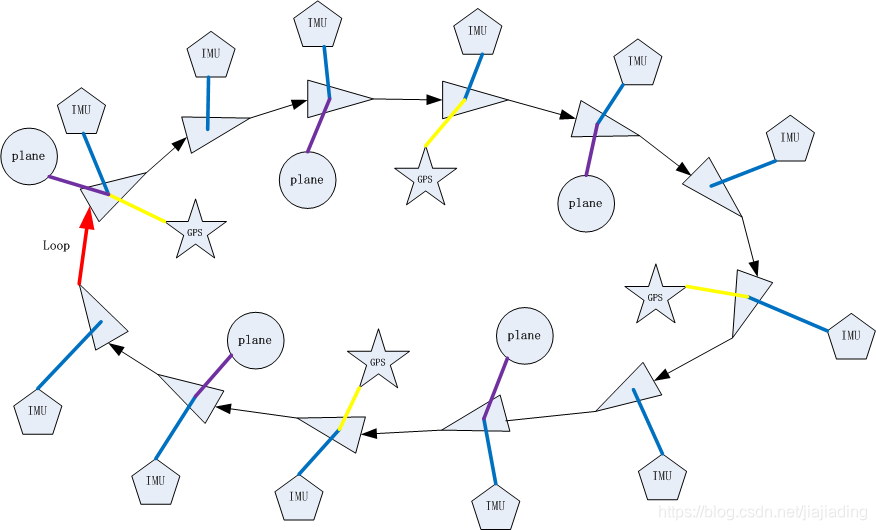
hdl-graph-slam不仅融合了imu、gps、平面、激光等多种输入,同时也带闭环检测等后端处理,即完整的一个slam架构。
功能介绍
hdl-graph-slam是一个非常优秀的SLAM框架,其功能较为全面(但不一定最优),包括平面检测及提取、点云预处理、激光里程计、闭环检测、gps和imu数据融合、后端优化等。
点云预处理
其主要目的是降采样和剔除异常噪点,可提升后续处理的速度和准确性;包含以下三个步骤:
// 有效距离滤波
pcl::PointCloud<PointT>::ConstPtr filtered = distance_filter(src_cloud);
// 降采样
filtered = downsample(filtered);
// 噪点滤波
filtered = outlier_removal(filtered);
- 剔除较远和较近的点云,从实际考虑,激光雷达测得过远或者过近的点可靠性较低,可先进行剔除;
- 由于一般选用的激光雷达获得的点云,在近处较为密集,而远处较为稀疏。降采样的目的可降低不同距离点云数量尽可能均衡,防止局部权重较大;不影响后端的性能下减少点云数目,从而提高运算速度。源码中调用的是开源pcl库中的VoxelGrid进行下采样;
- 激光点云中会存在一定的孤立的点云簇,由于其个数和特征不明显且容易对真实结果进行干扰,需将其异常点进行剔除。同样采用开源pcl库中的StatisticalOutlierRemoval和RadiusOutlierRemoval两种方法进行噪点剔除(实际上不一定是真实的噪点,而是孤立的,离群的点统称)。
平面检测
在3d的激光点云中,很多情况下都需要提取地面信息,而hdl中其主要目的是假设地面为平面的话,则可以根据点云进行提取并计算其参数,用于后端的约束,如此可以保证闭环在高度方向上和姿态角的准确性。但存在一个前提,即使用此功能需保证本体的确在平面上进行SLAM,否则不仅不能提高准确性,反而会增加误差;
平面检测思想也较为简单,其核心基本上调用开源库进行处理,分成两步:
- 点云预处理,先去除显然与平面特性不符合点云,包括高度与地面差距较大的点云、法线与地面法线夹角较大的点两类;
- 平面拟合,剩下的点可认为是较大可能为地平面上的点,采用pcl库中的RANSAC 算法拟合平面方法,拟合平面参数。为确保平面正确,也需要判断平面与真实地面夹角是否过大,平面中有效点云个数是否足够多等。
前端激光里程计
采用点云帧间匹配的方法提供累加的里程计信息;
hdl前端处理采用的方法十分简单,采用当前帧与上一时刻的点云进行匹配,调用pcl现成库,可支持以下几种帧间匹配方法,包括ICP, GICP, NDT三大类。
激光里程计流程如下:
- 接收点云数据和里程计数据;
- 新接收的点云进行降采样;
- 当前点云若为第一帧,则进行记录保存,放入匹配库中参考帧中;
- 如果非第一帧,则与参考帧进行点云匹配,如采用NDT匹配方法进行匹配;
- 增加异常判断,即如果两帧匹配点云转移矩阵相差过大,则抛弃;
- 增加运动滤波功能,即间隔一定距离时作为关键帧,进行记录同时更新参考点云帧;
- 实时累计位姿变换,发布激光里程计信息;
其他
实时获取gps和imu数据,主要用于后端约束优化处理。gps可提供全局静态位置,但是误差较大,而imu可提供高速的推算功能,但存在累计误差,通过后端优化,将其进行融合约束。
后端融合
后端调用g2o中图优化思想进行后端处理,关键帧作为顶点,而平面,gps,imu,闭环等信息作为边进行约束。














 315
315











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









