







 卡尔曼滤波本质上是一个数据融合算法,将具有同样测量目的、来自不同传感器、(可能) 具有不同单位 (unit) 的数据融合在一起,得到一个更精确的目的测量值。
卡尔曼滤波本质上是一个数据融合算法,将具有同样测量目的、来自不同传感器、(可能) 具有不同单位 (unit) 的数据融合在一起,得到一个更精确的目的测量值。
卡尔曼滤波本质上是一个数据融合算法,将具有同样测量目的、来自不同传感器、(可能) 具有不同单位 (unit) 的数据融合在一起,得到一个更精确的目的测量值。
卡尔曼滤波的局限性在于其只能拟合线性高斯系统,但其最大的优点在于计算量小,能够利用前一时刻的状态(和可能的测量值)来得到当前时刻下的状态的最优估计。
1、应用场合
1、卡尔曼滤波器应用在一些无法直接测量只能间接测量的场合。
2、从一些受误差影响的数据中得到系统状态。
2、两个方程式
运动方程式观测方程。
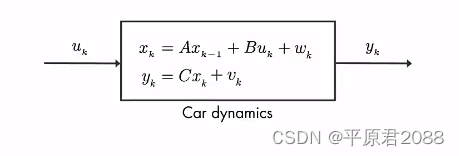
上图中第一行是运动方程式,第二行是观测方程式。运动方程式中由k-1时刻预测到k时刻的状态。
运动方程式中有状态xk-1,输入uk,过程误差wk(例如风速影响)。
观测方程式中有xk,观测误差vk(例如GPS的误差)。
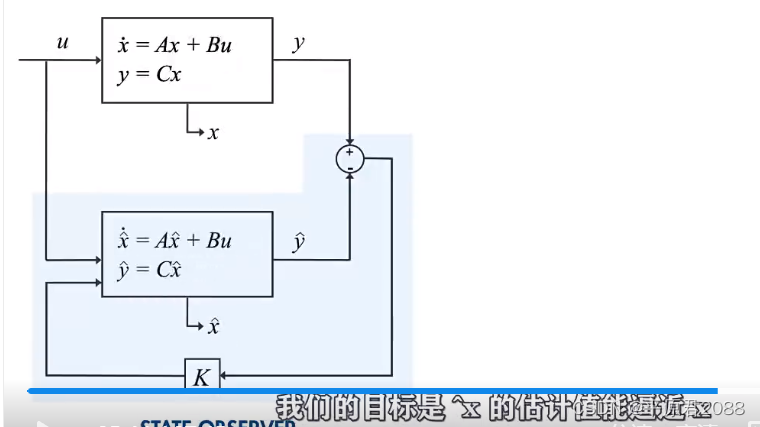
3、状态观测器方程模型
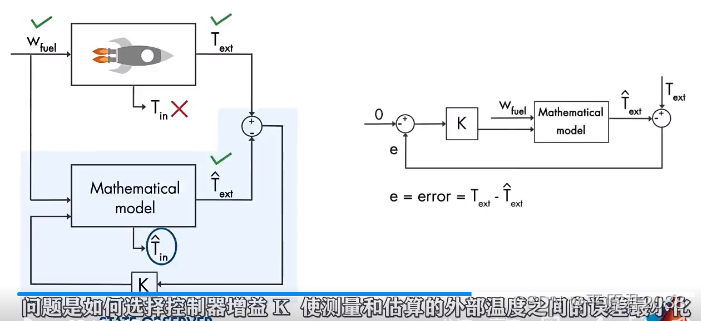
假设我们想知道火箭发动机内部的温度,但是内部温度过高,那么只能通过测量外部温度来间接得到内部温度。
知道燃料的输入Wfuel,知道外部测量输出Text,我们想知道发动机内部温度Tin。这个时候我们建立一个数学模型,把上面的输入Wfuel接入,得到输出估计值 T ˆ \^{T} Tˆext。然后让测量值Text和估计值 T ˆ \^{T} Tˆext之差最小,通过一个增益K反馈到预估模型的输入中,这样就形成了一个模拟反馈系统。如果能得到 T ˆ \^{T} Tˆin,则我们认为这就是近似发动机内部的温度。
如果预估值 T ˆ \^{T} Tˆext比测量值Text越大,则调整反馈让输出的下一个预估值越小。选择上述K的方法就是卡尔曼滤波。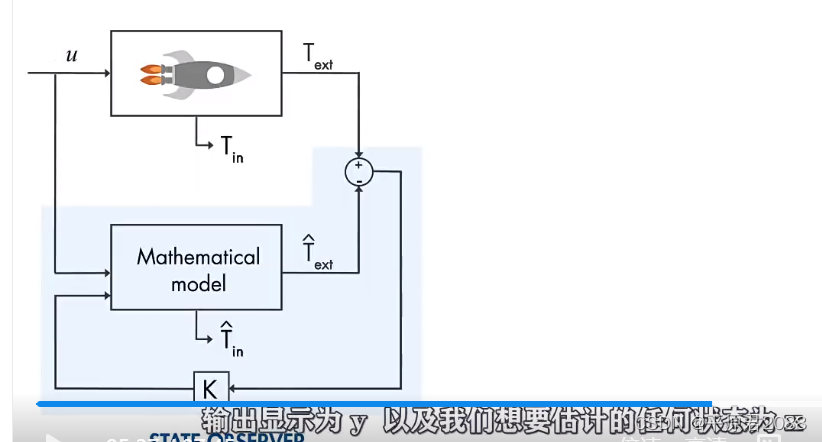
把上面的参数更改为如下: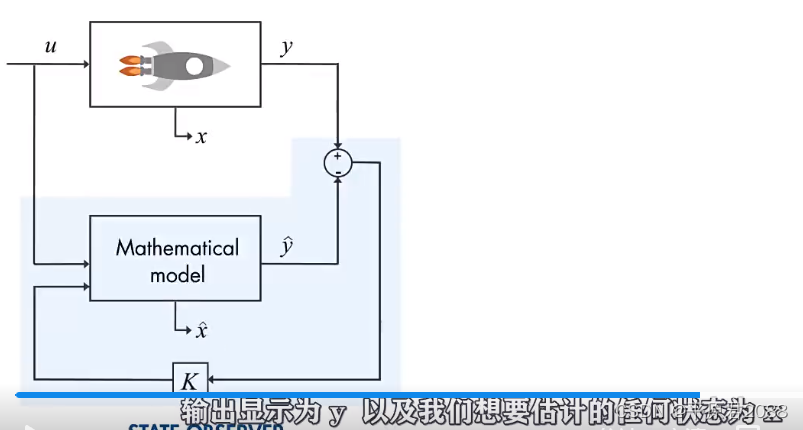
同时我们认为这个模型是线性高斯模型,系统统线性化后如下:
然后进行公式的转换: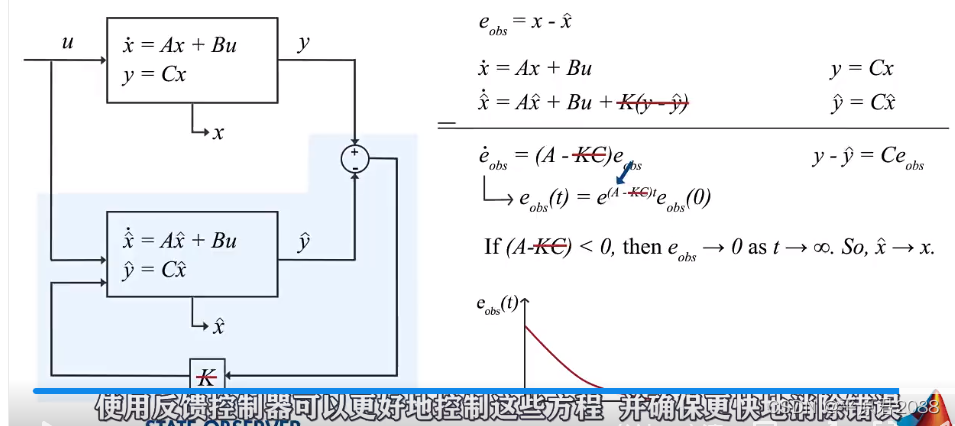
上面的解一个指数函数。如果A-KC项小于零,则错误eabs会随着时间越来越降小,最后 x ˆ \^{x}
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3152
3152











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









