






1.基本的概念
通信时钟不同可以将通信方式分为:
(1)异步通信:
是一种无需等待操作完成即可继续执行的通信方式。发送方将消息发送给接收方后,不会立即等待接收方的响应。相反,发送方可以继续执行其他任务,并在需要时检查接收方是否已经作出响应。
(2)同步通信是一种需要等待操作完成后才能继续执行的通信方式。发送方在发送消息后会阻塞,直到接收方完成处理并返回响应。只有在接收到响应后,发送方才能继续执行后续任务。
(3)两者的区别 :
1.同步通信要求接收端时钟频率和发送端时钟频率一致,发送端发送连续的比特流;异步通信时不要求接收端时钟和发送端时钟同步,发送端发送完一个字节后,可经过任意长的时间间隔再发送下一个字节。
2.同步通信效率高;异步通信效率较低。
3.同步通信较复杂,双方时钟的允许误差较小;异步通信简单,双方时钟可允许一定误差。
4.同步通信可用于点对多点;异步通信只适用于点对点。

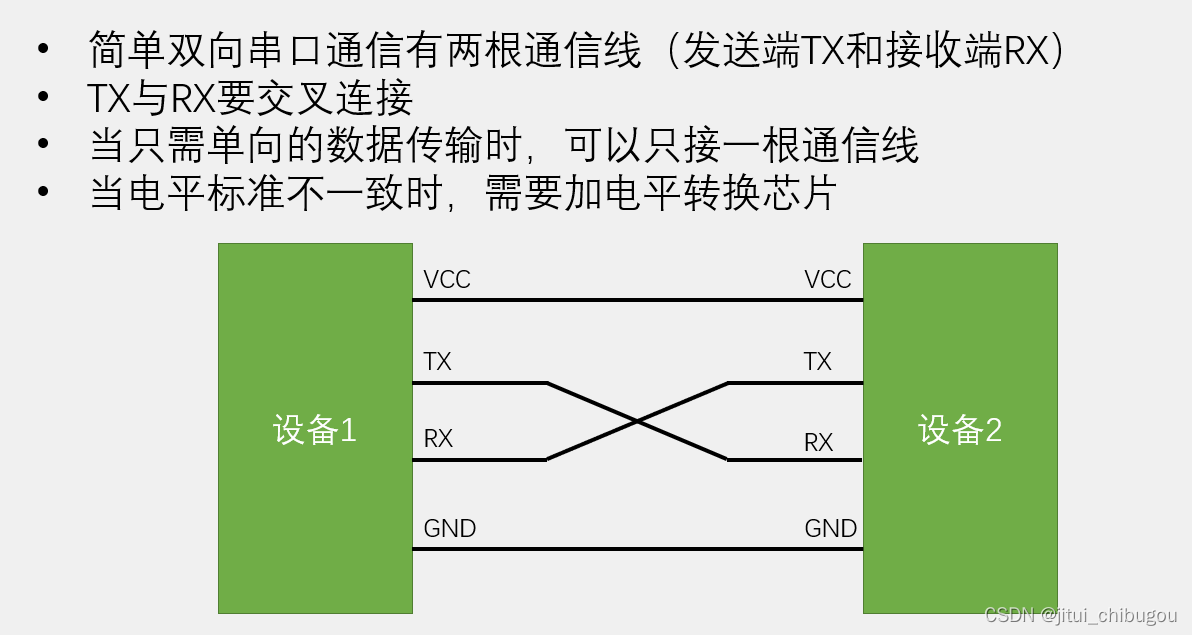
TX发送,RX接收,使用TTL电平(3.3v表示1,0v表示0)
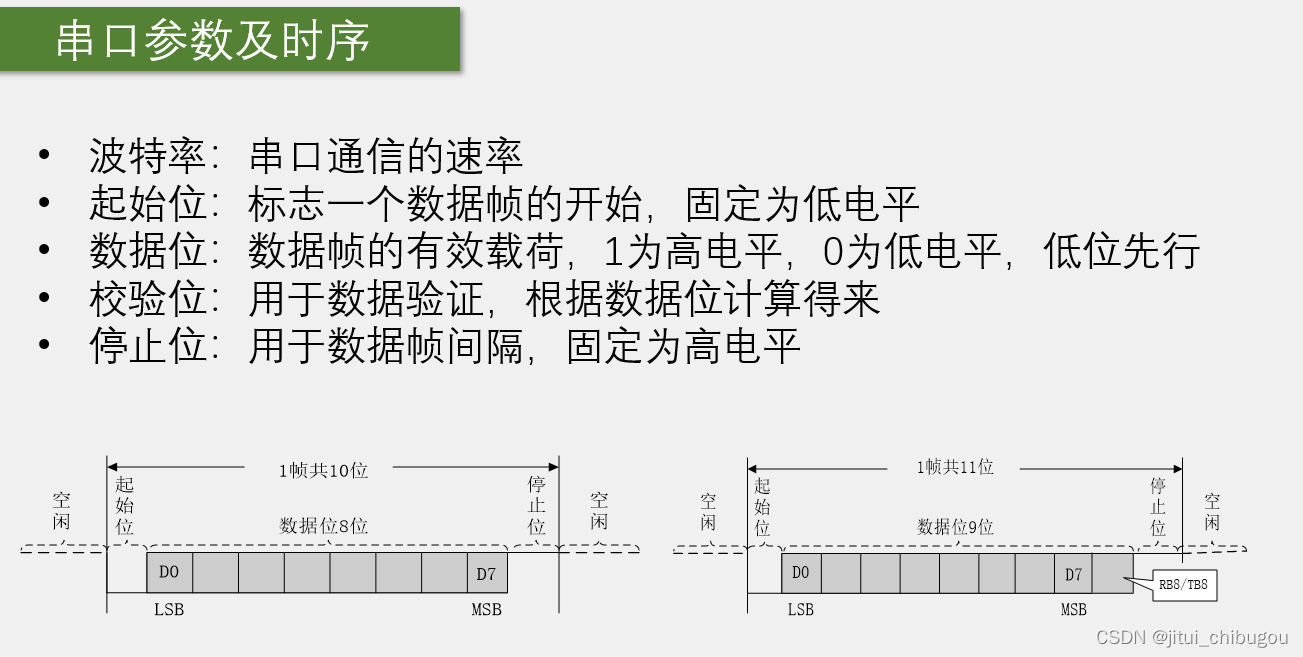
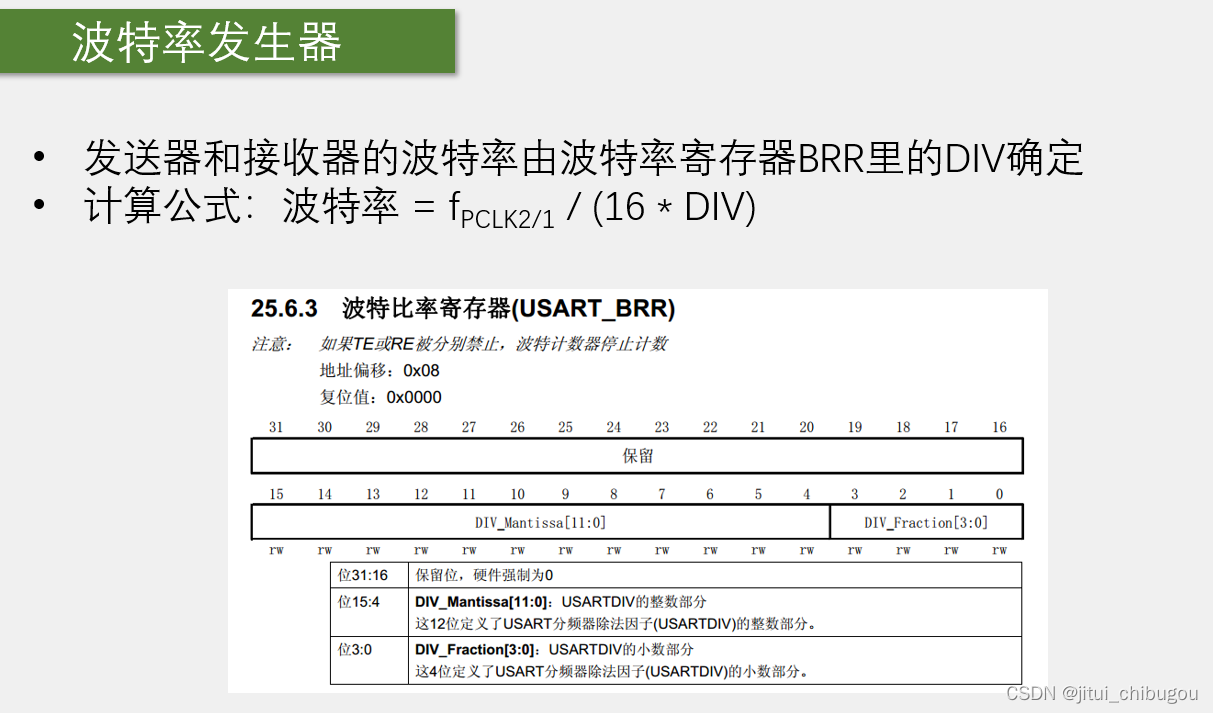
波特率:串口通信的速率,也就是串口通信时每秒钟可以传输多少个二进制位。
传输的过程:空闲状态保持高电平,给低电平(下降沿)后开始传输数据,并且是从数据的低位开始传输,所以给出数据的二进制码后需要从低位到高位输入电平。
奇偶校验位(这个方法的检出率太低,可以拓展一下CRC校验):可以选择不校验,奇校验,偶校验。不校验就是左图,偶校验就是右图。
(总结:选择x校验,就保证1的个数时x数)
奇校验:数据位有奇数个1时,校验位给0;有偶数个1时,校验位给1。
偶校验:数据位有偶数个1时,校验位给0;有奇数个1时,校验位给1。
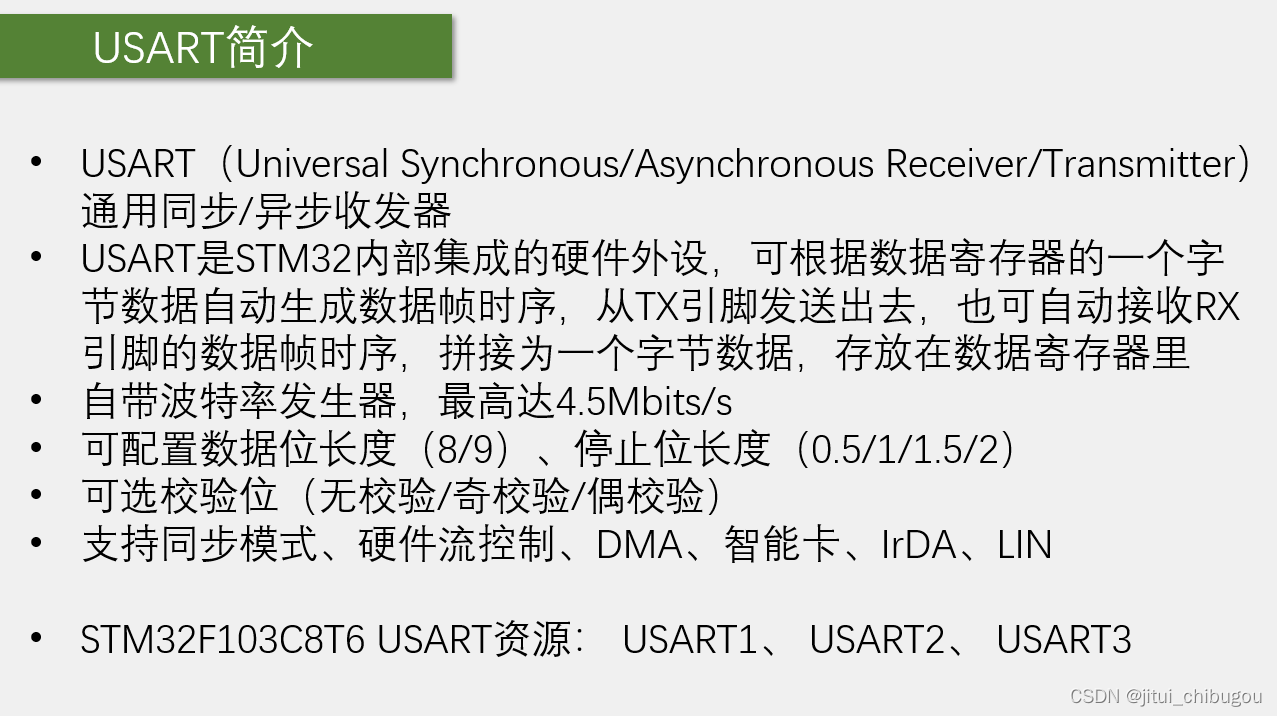
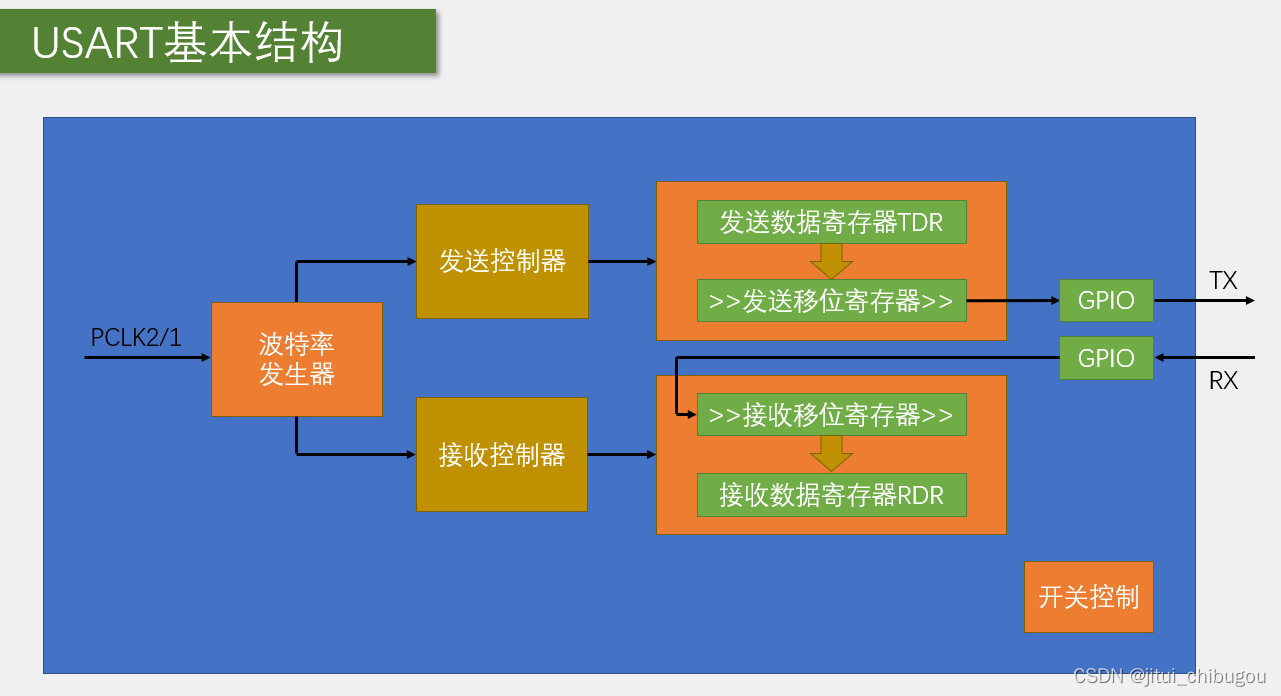
2.USART简介
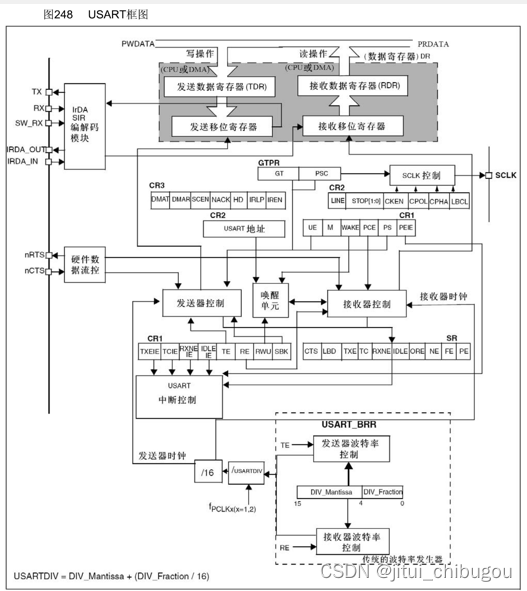
DR寄存器分为TDR(写入寄存器)和RDR(接收寄存器)
USART框图寄存器的工作原理:
(1)写操作时:数据进入TDR,然后进入发送移位寄存器(一旦发送到此,后面的数据就在TDR中等待),移位完成后(后面在TDR中等待的数据立马进入移位寄存器),标志位TXE置1(发送寄存器空)。最后发送器控制发送至TX引脚。
(2)读操作时:.....标志位RXNE置1......
移位寄存器每移位一次SCLK就跳变一个周期
3.利用串口发送数据的步骤:
(1).开启usart的时钟
(2).配置初始结构体:
.USART_BaudRate :波特率
.USART_HardwareFlowControl:选择是否需要硬件流控制
.USART_Mode:选择发送或接收模式
.USART_Parity:选择奇偶校验
.USART_StopBits:选择停止位长度
.USART_WordLength:选择字长
(3).使能USART
void Serial_Init(void) { /*开启时钟*/ RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟 /*GPIO初始化*/ GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA9引脚初始化为复用推挽输出 /*USART初始化*/ USART_InitTypeDef USART_InitStructure; //定义结构体变量 USART_InitStructure.USART_BaudRate = 9600; //波特率 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要 USART_InitStructure.USART_Mode = USART_Mode_Tx; //模式,选择为发送模式 USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要 USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位 USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位 USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1 /*USART使能*/ USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行 }(4).实现一些串口的小功能:
1.Serial_SendByte(uint8_t Byte)函数:发送一个字节
2.Serial_SendArray(uint8_t *Array, uint16_t Length)函数:发送一个数组
3.Serial_SendString(char *String)函数:发送一个字符串
4.uint32_t Serial_Pow(uint32_t X, uint32_t Y)函数:发送x的y次方
5.Serial_SendNumber(uint32_t Number, uint8_t Length)函数:发送数字
6.输出功能:
①格式化输出->printf()函数:重定向fputc函数,因为printf的底层是调用fputc函数实现的。
②直接输出->Serial_Printf(char *format, ...)函数:sprint()函数,定义字符串,再调用sprint()函数,然后调用Serial_SendString(char *String)函数发送字符串来打印【这里利用了可变参数列表需要注意】
/** * 函 数:串口发送一个字节 * 参 数:Byte 要发送的一个字节 * 返 回 值:无 */ void Serial_SendByte(uint8_t Byte) { USART_SendData(USART1, Byte); //将字节数据写入数据寄存器,写入后USART自动生成时序波形 while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待发送完成,发送标志位为TXE /*下次写入数据寄存器会自动清除发送完成标志位,故此循环后,无需清除标志位*/ } /** * 函 数:串口发送一个数组 * 参 数:Array 要发送数组的首地址,形参是一个指针变量,指针变量存放地址,普通变量存放数据 * 参 数:Length 要发送数组的长度 * 返 回 值:无 */ void Serial_SendArray(uint8_t *Array, uint16_t Length) { uint16_t i; for (i = 0; i < Length; i ++) //遍历数组 { Serial_SendByte(Array[i]); //依次调用Serial_SendByte发送每个字节数据 } } /** * 函 数:串口发送一个字符串 * 参 数:String 要发送字符串的首地址 * 返 回 值:无 */ void Serial_SendString(char *String) { uint8_t i; for (i = 0; String[i] != '\0'; i ++)//遍历字符数组(字符串),遇到字符串结束标志位后停止 { Serial_SendByte(String[i]); //依次调用Serial_SendByte发送每个字节数据 } } /** * 函 数:次方函数(内部使用) * 返 回 值:返回值等于X的Y次方 */ uint32_t Serial_Pow(uint32_t X, uint32_t Y) { uint32_t Result = 1; //设置结果初值为1 while (Y --) //执行Y次 { Result *= X; //将X累乘到结果 } return Result; } /** * 函 数:串口发送数字 * 参 数:Number 要发送的数字,范围:0~4294967295 * 参 数:Length 要发送数字的长度,范围:0~10 * 返 回 值:无 */ void Serial_SendNumber(uint32_t Number, uint8_t Length) { uint8_t i; for (i = 0; i < Length; i ++) //根据数字长度遍历数字的每一位 { Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0'); //依次调用Serial_SendByte发送每位数字 } } /** * 函 数:使用printf需要重定向的底层函数 * 参 数:保持原始格式即可,无需变动 * 返 回 值:保持原始格式即可,无需变动 */ int fputc(int ch, FILE *f) { Serial_SendByte(ch); //将printf的底层重定向到自己的发送字节函数 return ch; } /** * 函 数:自己封装的prinf函数 * 参 数:format 格式化字符串 * 参 数:... 可变的参数列表 * 返 回 值:无 */ void Serial_Printf(char *format, ...) { char String[100]; //定义字符数组 va_list arg; //定义可变参数列表数据类型的变量arg va_start(arg, format); //从format开始,接收参数列表到arg变量 vsprintf(String, format, arg); //使用vsprintf打印格式化字符串和参数列表到字符数组中 va_end(arg); //结束变量arg Serial_SendString(String); //串口发送字符数组(字符串) }
4.利用串口发送+接收数据步骤:
ps:关于USART开启中断:
void USART_ITConfig(USART_TypeDef* USARTx, uint32_t USART_IT, FunctionalState NewState);
USART_IT参数可以是以下值之一:
USART_IT_TXE:当USART的发送数据寄存器为空时会触发这个中断。
USART_IT_TC:当USART的发送数据寄存器为空并且发送完最后一个数据后会触发这个中断。
USART_IT_RXNE:当USART接收到一个数据后会触发这个中断。
USART_IT_IDLE:当USART接收到一帧数据后,在接收行为完成之前会出发这个中断。
USART_IT_LBD:当LIN Break检测到时会出发这个中断。
USART_IT_CTS:当CTS改变状态时会触发这个中断。
NewState参数可以是ENABLE,表示使能中断;或者是DISABLE,表示禁用中断。
步骤:
(1).开启usart的时钟
(2).配置初始结构体:
.USART_BaudRate :波特率
.USART_HardwareFlowControl:选择是否需要硬件流控制
.USART_Mode:选择发送或接收模式
.USART_Parity:选择奇偶校验
.USART_StopBits:选择停止位长度
.USART_WordLength:选择字长
(3).USART_ITConfig中断输出配置,判断RXNE标志位置1了就跳入中断函数(接收完成后跳入中断)
(4).NVIC配置
(5).使能USART
void Serial_Init(void) { /*开启时钟*/ RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟 /*GPIO初始化*/ GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA9引脚初始化为复用推挽输出 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA10引脚初始化为上拉输入 /*USART初始化*/ USART_InitTypeDef USART_InitStructure; //定义结构体变量 USART_InitStructure.USART_BaudRate = 9600; //波特率 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要 USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //模式,发送模式和接收模式均选择 USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要 USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位 USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位 USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1 /*中断输出配置*/ USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启串口接收数据的中断,如果RXNE标志位置1了就跳入中断函数 /*NVIC中断分组*/ NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2 /*NVIC配置*/ NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //选择配置NVIC的USART1线 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1 NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设 /*USART使能*/ USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行 }(6)配置相关的中断函数
1.Serial_GetRxFlag函数:获取串口接收标志位
2. Serial_GetRxData函数:获取串口接收的数据
3.USART1_IRQHandler函数:USART1中断函数
相关函数:
USART_GetITStatus:获取usart不同的中断标志位
USART_ClearITPendingBit:清除usart的中断标志位
USART_ReceiveData:读取数据寄存器DR中的数据
/** * 函 数:获取串口接收标志位 * 参 数:无 * 返 回 值:串口接收标志位,范围:0~1,接收到数据后,标志位置1,读取后标志位自动清零 */ uint8_t Serial_GetRxFlag(void) { if (Serial_RxFlag == 1) //如果标志位为1 { Serial_RxFlag = 0; return 1; //则返回1,并自动清零标志位 } return 0; //如果标志位为0,则返回0 } /** * 函 数:获取串口接收的数据 * 参 数:无 * 返 回 值:接收的数据,范围:0~255 */ uint8_t Serial_GetRxData(void) { return Serial_RxData; //返回接收的数据变量 } /** * 函 数:USART1中断函数 * 参 数:无 * 返 回 值:无 * 注意事项:此函数为中断函数,无需调用,中断触发后自动执行 * 函数名为预留的指定名称,可以从启动文件复制 * 请确保函数名正确,不能有任何差异,否则中断函数将不能进入 */ void USART1_IRQHandler(void) { if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET) //判断是否是USART1的接收事件触发的中断 { Serial_RxData = USART_ReceiveData(USART1); //读取数据寄存器,存放在接收的数据变量 Serial_RxFlag = 1; //置接收标志位变量为1 USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清除USART1的RXNE标志位 //读取数据寄存器会自动清除此标志位 //如果已经读取了数据寄存器,也可以不执行此代码 } }
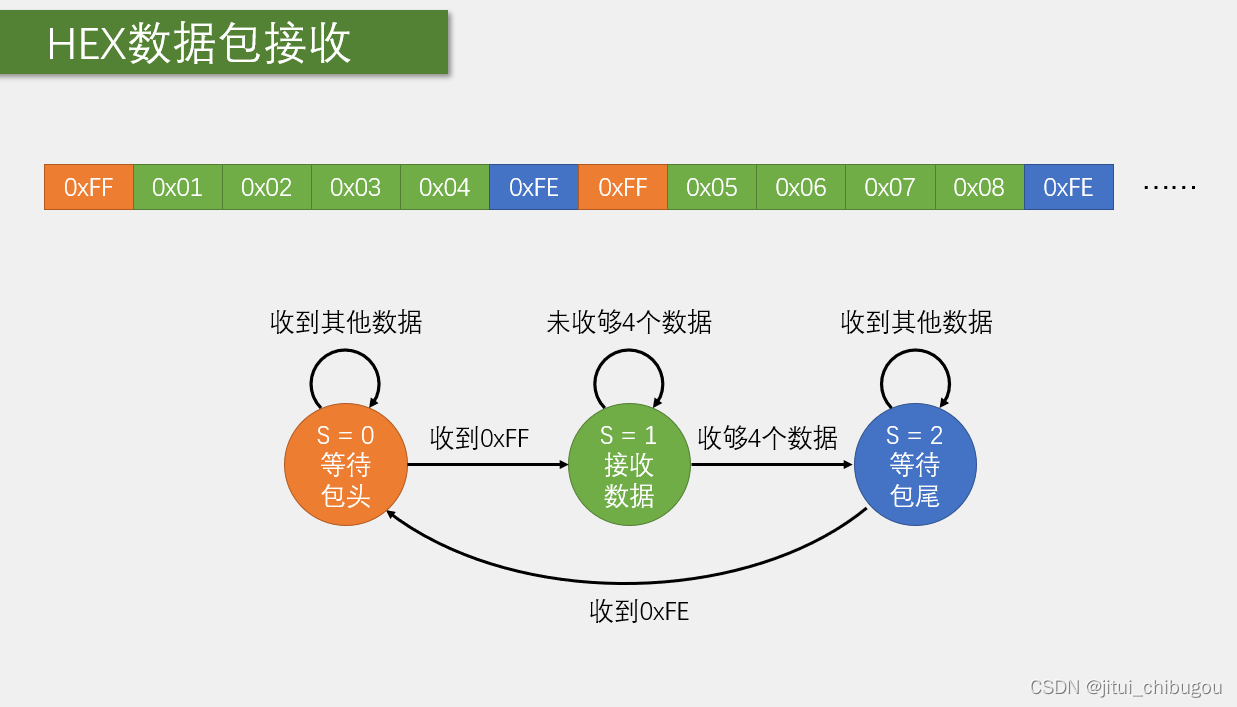
5.利用串口发送HEX数据包
利用状态机(它描述了对象在其生命周期中的状态如何根据输入或事件而转换。简单来说,状态机是一个可以表示对象状态及其状态之间转换的框架或图形表示。)的思想在中断函数中配置。
#include "stm32f10x.h" // Device header #include <stdio.h> #include <stdarg.h> uint8_t Serial_TxPacket[4]; //定义发送数据包数组,数据包格式:FF 01 02 03 04 FE uint8_t Serial_RxPacket[4]; //定义接收数据包数组 uint8_t Serial_RxFlag; //定义接收数据包标志位 /** * 函 数:串口初始化 * 参 数:无 * 返 回 值:无 */ void Serial_Init(void) { /*开启时钟*/ RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟 /*GPIO初始化*/ GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA9引脚初始化为复用推挽输出 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA10引脚初始化为上拉输入 /*USART初始化*/ USART_InitTypeDef USART_InitStructure; //定义结构体变量 USART_InitStructure.USART_BaudRate = 9600; //波特率 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要 USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //模式,发送模式和接收模式均选择 USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要 USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位 USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位 USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1 /*中断输出配置*/ USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启串口接收数据的中断 /*NVIC中断分组*/ NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2 /*NVIC配置*/ NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //选择配置NVIC的USART1线 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1 NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设 /*USART使能*/ USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行 } /** * 函 数:串口发送一个字节 * 参 数:Byte 要发送的一个字节 * 返 回 值:无 */ void Serial_SendByte(uint8_t Byte) { USART_SendData(USART1, Byte); //将字节数据写入数据寄存器,写入后USART自动生成时序波形 while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待发送完成 /*下次写入数据寄存器会自动清除发送完成标志位,故此循环后,无需清除标志位*/ } /** * 函 数:串口发送一个数组 * 参 数:Array 要发送数组的首地址 * 参 数:Length 要发送数组的长度 * 返 回 值:无 */ void Serial_SendArray(uint8_t *Array, uint16_t Length) { uint16_t i; for (i = 0; i < Length; i ++) //遍历数组 { Serial_SendByte(Array[i]); //依次调用Serial_SendByte发送每个字节数据 } } /** * 函 数:串口发送一个字符串 * 参 数:String 要发送字符串的首地址 * 返 回 值:无 */ void Serial_SendString(char *String) { uint8_t i; for (i = 0; String[i] != '\0'; i ++)//遍历字符数组(字符串),遇到字符串结束标志位后停止 { Serial_SendByte(String[i]); //依次调用Serial_SendByte发送每个字节数据 } } /** * 函 数:次方函数(内部使用) * 返 回 值:返回值等于X的Y次方 */ uint32_t Serial_Pow(uint32_t X, uint32_t Y) { uint32_t Result = 1; //设置结果初值为1 while (Y --) //执行Y次 { Result *= X; //将X累乘到结果 } return Result; } /** * 函 数:串口发送数字 * 参 数:Number 要发送的数字,范围:0~4294967295 * 参 数:Length 要发送数字的长度,范围:0~10 * 返 回 值:无 */ void Serial_SendNumber(uint32_t Number, uint8_t Length) { uint8_t i; for (i = 0; i < Length; i ++) //根据数字长度遍历数字的每一位 { Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0'); //依次调用Serial_SendByte发送每位数字 } } /** * 函 数:使用printf需要重定向的底层函数 * 参 数:保持原始格式即可,无需变动 * 返 回 值:保持原始格式即可,无需变动 */ int fputc(int ch, FILE *f) { Serial_SendByte(ch); //将printf的底层重定向到自己的发送字节函数 return ch; } /** * 函 数:自己封装的prinf函数 * 参 数:format 格式化字符串 * 参 数:... 可变的参数列表 * 返 回 值:无 */ void Serial_Printf(char *format, ...) { char String[100]; //定义字符数组 va_list arg; //定义可变参数列表数据类型的变量arg va_start(arg, format); //从format开始,接收参数列表到arg变量 vsprintf(String, format, arg); //使用vsprintf打印格式化字符串和参数列表到字符数组中 va_end(arg); //结束变量arg Serial_SendString(String); //串口发送字符数组(字符串) } /** * 函 数:串口发送数据包 * 参 数:无 * 返 回 值:无 * 说 明:调用此函数后,Serial_TxPacket数组的内容将加上包头(FF)包尾(FE)后,作为数据包发送出去 */ void Serial_SendPacket(void) { Serial_SendByte(0xFF); Serial_SendArray(Serial_TxPacket, 4); Serial_SendByte(0xFE); } /** * 函 数:获取串口接收数据包标志位 * 参 数:无 * 返 回 值:串口接收数据包标志位,范围:0~1,接收到数据包后,标志位置1,读取后标志位自动清零 */ uint8_t Serial_GetRxFlag(void) { if (Serial_RxFlag == 1) //如果标志位为1 { Serial_RxFlag = 0; return 1; //则返回1,并自动清零标志位 } return 0; //如果标志位为0,则返回0 } /** * 函 数:USART1中断函数 * 参 数:无 * 返 回 值:无 * 注意事项:此函数为中断函数,无需调用,中断触发后自动执行 * 函数名为预留的指定名称,可以从启动文件复制 * 请确保函数名正确,不能有任何差异,否则中断函数将不能进入 */ void USART1_IRQHandler(void) { static uint8_t RxState = 0; //定义表示当前状态机状态的静态变量 static uint8_t pRxPacket = 0; //定义表示当前接收数据位置的静态变量 if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET) //判断是否是USART1的接收事件触发的中断 { uint8_t RxData = USART_ReceiveData(USART1); //读取数据寄存器,存放在接收的数据变量 /*使用状态机的思路,依次处理数据包的不同部分*/ /*当前状态为0,接收数据包包头*/ if (RxState == 0) { if (RxData == 0xFF) //如果数据确实是包头 { RxState = 1; //置下一个状态 pRxPacket = 0; //数据包的位置归零 } } /*当前状态为1,接收数据包数据*/ else if (RxState == 1) { Serial_RxPacket[pRxPacket] = RxData; //将数据存入数据包数组的指定位置 pRxPacket ++; //数据包的位置自增 if (pRxPacket >= 4) //如果收够4个数据 { RxState = 2; //置下一个状态 } } /*当前状态为2,接收数据包包尾*/ else if (RxState == 2) { if (RxData == 0xFE) //如果数据确实是包尾部 { RxState = 0; //状态归0 Serial_RxFlag = 1; //接收数据包标志位置1,成功接收一个数据包 } } USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清除标志位 } }
6.利用串口发送不同包长的文本数据包
Serial.c
#include "stm32f10x.h" // Device header #include <stdio.h> #include <stdarg.h> char Serial_RxPacket[100]; //定义接收数据包数组,数据包格式"@MSG\r\n" uint8_t Serial_RxFlag; //定义接收数据包标志位 /** * 函 数:串口初始化 * 参 数:无 * 返 回 值:无 */ void Serial_Init(void) { /*开启时钟*/ RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //开启USART1的时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟 /*GPIO初始化*/ GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA9引脚初始化为复用推挽输出 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA10引脚初始化为上拉输入 /*USART初始化*/ USART_InitTypeDef USART_InitStructure; //定义结构体变量 USART_InitStructure.USART_BaudRate = 9600; //波特率 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流控制,不需要 USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; //模式,发送模式和接收模式均选择 USART_InitStructure.USART_Parity = USART_Parity_No; //奇偶校验,不需要 USART_InitStructure.USART_StopBits = USART_StopBits_1; //停止位,选择1位 USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长,选择8位 USART_Init(USART1, &USART_InitStructure); //将结构体变量交给USART_Init,配置USART1 /*中断输出配置*/ USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启串口接收数据的中断 /*NVIC中断分组*/ NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC为分组2 /*NVIC配置*/ NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //选择配置NVIC的USART1线 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能 NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //指定NVIC线路的抢占优先级为1 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; //指定NVIC线路的响应优先级为1 NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设 /*USART使能*/ USART_Cmd(USART1, ENABLE); //使能USART1,串口开始运行 } /** * 函 数:串口发送一个字节 * 参 数:Byte 要发送的一个字节 * 返 回 值:无 */ void Serial_SendByte(uint8_t Byte) { USART_SendData(USART1, Byte); //将字节数据写入数据寄存器,写入后USART自动生成时序波形 while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //等待发送完成 /*下次写入数据寄存器会自动清除发送完成标志位,故此循环后,无需清除标志位*/ } /** * 函 数:串口发送一个数组 * 参 数:Array 要发送数组的首地址 * 参 数:Length 要发送数组的长度 * 返 回 值:无 */ void Serial_SendArray(uint8_t *Array, uint16_t Length) { uint16_t i; for (i = 0; i < Length; i ++) //遍历数组 { Serial_SendByte(Array[i]); //依次调用Serial_SendByte发送每个字节数据 } } /** * 函 数:串口发送一个字符串 * 参 数:String 要发送字符串的首地址 * 返 回 值:无 */ void Serial_SendString(char *String) { uint8_t i; for (i = 0; String[i] != '\0'; i ++)//遍历字符数组(字符串),遇到字符串结束标志位后停止 { Serial_SendByte(String[i]); //依次调用Serial_SendByte发送每个字节数据 } } /** * 函 数:次方函数(内部使用) * 返 回 值:返回值等于X的Y次方 */ uint32_t Serial_Pow(uint32_t X, uint32_t Y) { uint32_t Result = 1; //设置结果初值为1 while (Y --) //执行Y次 { Result *= X; //将X累乘到结果 } return Result; } /** * 函 数:串口发送数字 * 参 数:Number 要发送的数字,范围:0~4294967295 * 参 数:Length 要发送数字的长度,范围:0~10 * 返 回 值:无 */ void Serial_SendNumber(uint32_t Number, uint8_t Length) { uint8_t i; for (i = 0; i < Length; i ++) //根据数字长度遍历数字的每一位 { Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0'); //依次调用Serial_SendByte发送每位数字 } } /** * 函 数:使用printf需要重定向的底层函数 * 参 数:保持原始格式即可,无需变动 * 返 回 值:保持原始格式即可,无需变动 */ int fputc(int ch, FILE *f) { Serial_SendByte(ch); //将printf的底层重定向到自己的发送字节函数 return ch; } /** * 函 数:自己封装的prinf函数 * 参 数:format 格式化字符串 * 参 数:... 可变的参数列表 * 返 回 值:无 */ void Serial_Printf(char *format, ...) { char String[100]; //定义字符数组 va_list arg; //定义可变参数列表数据类型的变量arg va_start(arg, format); //从format开始,接收参数列表到arg变量 vsprintf(String, format, arg); //使用vsprintf打印格式化字符串和参数列表到字符数组中 va_end(arg); //结束变量arg Serial_SendString(String); //串口发送字符数组(字符串) } /** * 函 数:USART1中断函数 * 参 数:无 * 返 回 值:无 * 注意事项:此函数为中断函数,无需调用,中断触发后自动执行 * 函数名为预留的指定名称,可以从启动文件复制 * 请确保函数名正确,不能有任何差异,否则中断函数将不能进入 */ void USART1_IRQHandler(void) { static uint8_t RxState = 0; //定义表示当前状态机状态的静态变量 static uint8_t pRxPacket = 0; //定义表示当前接收数据位置的静态变量 if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET) //判断是否是USART1的接收事件触发的中断 { uint8_t RxData = USART_ReceiveData(USART1); //读取数据寄存器,存放在接收的数据变量 /*使用状态机的思路,依次处理数据包的不同部分*/ /*当前状态为0,接收数据包包头*/ if (RxState == 0) { if (RxData == '@' && Serial_RxFlag == 0) //如果数据确实是包头,并且上一个数据包已处理完毕 { RxState = 1; //置下一个状态 pRxPacket = 0; //数据包的位置归零 } } /*当前状态为1,接收数据包数据,同时判断是否接收到了第一个包尾*/ else if (RxState == 1) { if (RxData == '\r') //如果收到第一个包尾 { RxState = 2; //置下一个状态 } else //接收到了正常的数据 { Serial_RxPacket[pRxPacket] = RxData; //将数据存入数据包数组的指定位置 pRxPacket ++; //数据包的位置自增 } } /*当前状态为2,接收数据包第二个包尾*/ else if (RxState == 2) { if (RxData == '\n') //如果收到第二个包尾 { RxState = 0; //状态归0 Serial_RxPacket[pRxPacket] = '\0'; //将收到的字符数据包添加一个字符串结束标志 Serial_RxFlag = 1; //接收数据包标志位置1,成功接收一个数据包 } } USART_ClearITPendingBit(USART1, USART_IT_RXNE); //清除标志位 } }main.c
#include "stm32f10x.h" // Device header #include "Delay.h" #include "OLED.h" #include "Serial.h" #include "LED.h" #include "string.h" int main(void) { /*模块初始化*/ OLED_Init(); //OLED初始化 LED_Init(); //LED初始化 Serial_Init(); //串口初始化 /*显示静态字符串*/ OLED_ShowString(1, 1, "TxPacket"); OLED_ShowString(3, 1, "RxPacket"); while (1) { if (Serial_RxFlag == 1) //如果接收到数据包 { OLED_ShowString(4, 1, " "); OLED_ShowString(4, 1, Serial_RxPacket); //OLED清除指定位置,并显示接收到的数据包 /*将收到的数据包与预设的指令对比,以此决定将要执行的操作*/ if (strcmp(Serial_RxPacket, "LED_ON") == 0) //如果收到LED_ON指令 { LED1_ON(); //点亮LED Serial_SendString("LED_ON_OK\r\n"); //串口回传一个字符串LED_ON_OK OLED_ShowString(2, 1, " "); OLED_ShowString(2, 1, "LED_ON_OK"); //OLED清除指定位置,并显示LED_ON_OK } else if (strcmp(Serial_RxPacket, "LED_OFF") == 0) //如果收到LED_OFF指令 { LED1_OFF(); //熄灭LED Serial_SendString("LED_OFF_OK\r\n"); //串口回传一个字符串LED_OFF_OK OLED_ShowString(2, 1, " "); OLED_ShowString(2, 1, "LED_OFF_OK"); //OLED清除指定位置,并显示LED_OFF_OK } else //上述所有条件均不满足,即收到了未知指令 { Serial_SendString("ERROR_COMMAND\r\n"); //串口回传一个字符串ERROR_COMMAND OLED_ShowString(2, 1, " "); OLED_ShowString(2, 1, "ERROR_COMMAND"); //OLED清除指定位置,并显示ERROR_COMMAND } Serial_RxFlag = 0; //处理完成后,需要将接收数据包标志位清零,否则将无法接收后续数据包 } } }















 981
981

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









