







前言
SVD分解是一种特别有意思的降维手段,它在降维的同时还可以发现某些潜在的隐向量,这些向量对于数据之间的潜在关系有很大的帮助。
下面我们使用一个例子来逐步导出SVD的近似分解,理解如何通过SVD来发现数据之间的潜在关系。
数据集
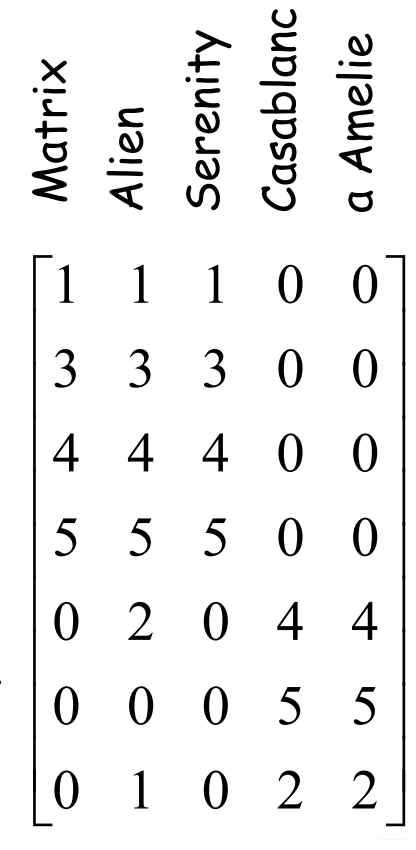
假设我们手上有一个电影评分矩阵
A
A
A,
A
i
,
j
A_{i,j}
Ai,j 表示第
i
i
i 个人对第
j
j
j 个电影的打分(0-5,打分越高说明评价越高)。一共有6个人,5个电影。这 5部电影前三部是科幻电影,最后两部是爱情电影。
任务
我们把矩阵
A
6
×
5
A_{6\times5}
A6×5 看做是6个
R
5
R^5
R5 空间上的点形成的一个子空间(或者集合),现在我们想在
R
5
R^5
R5 上找一个单位向量
v
∈
R
5
v \in R^5
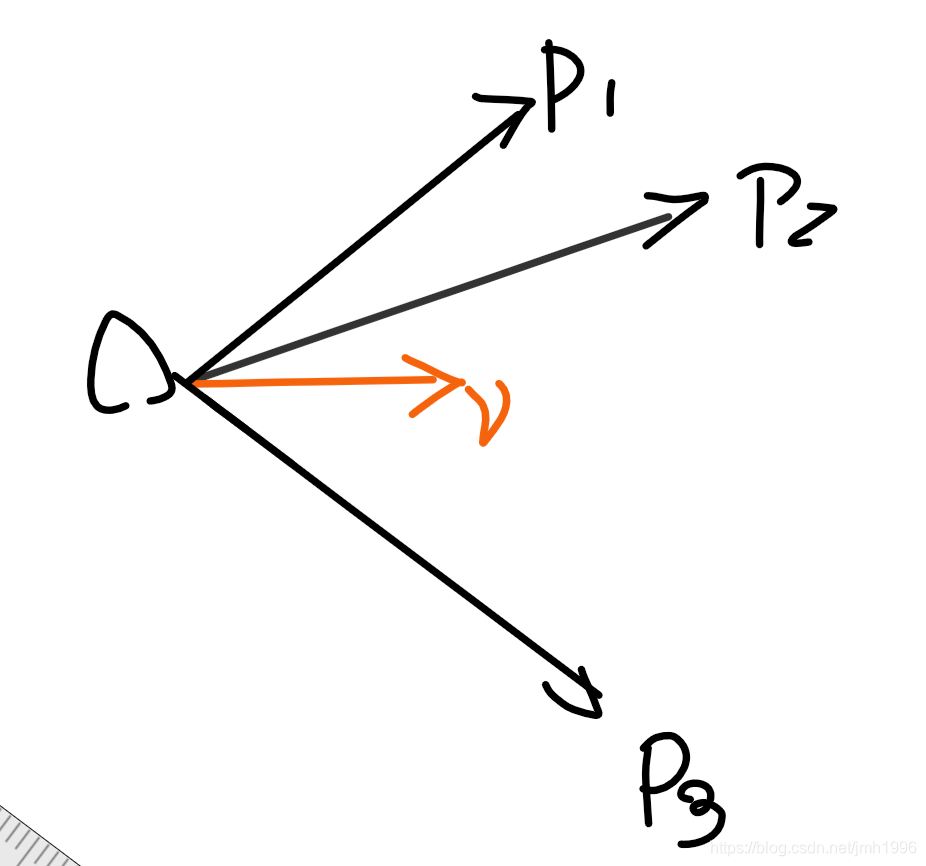
v∈R5,使得这个向量穿过这个子空间里面尽量多的点,或者说让这个子空间里的点离这个向量的距离平方和最小。
求解
就如上图所示,寻找一个
v
v
v,使得
P
1
,
P
2
,
P
3
P_1,P_2,P_3
P1,P2,P3 到这个
v
v
v所在的距离和的平方最小。这个问题实际上等价于:寻找一个
v
v
v,使得
P
1
,
P
2
,
P
3
P_1,P_2,P_3
P1,P2,P3 在这个
v
v
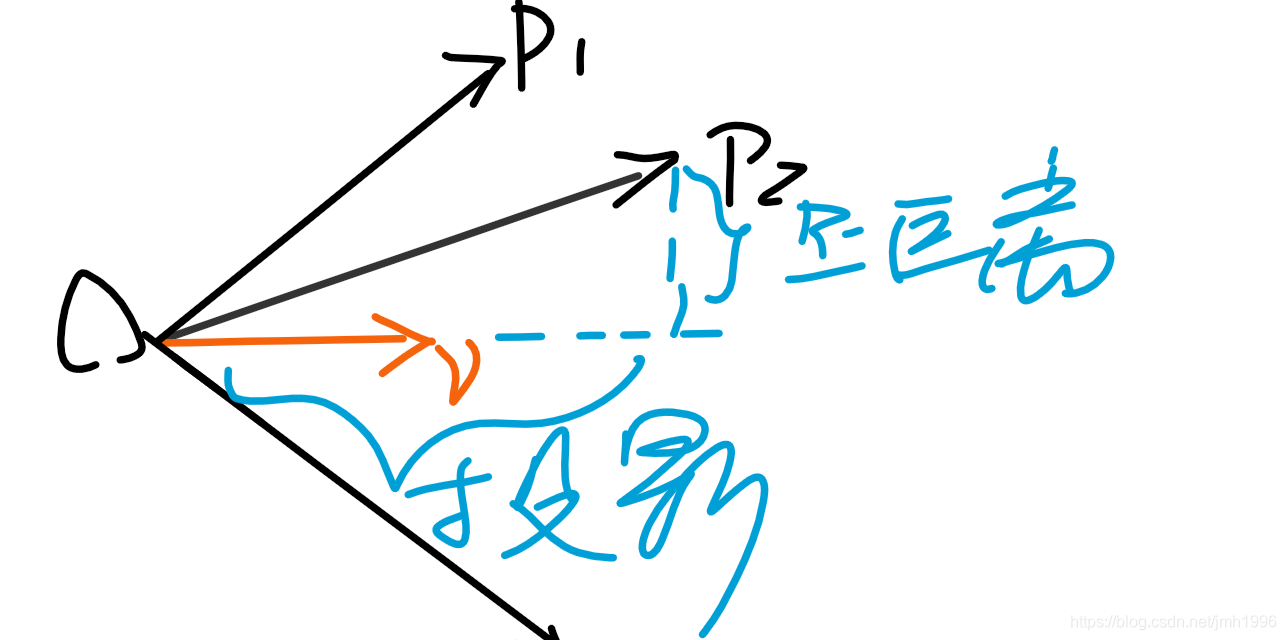
v方向的投影的值的平方和最大。为什么呢?
对于
P
2
P_2
P2 来说,
O
P
⃗
\vec{OP}
OP模长是固定的,
∣
O
P
⃗
∣
2
=
距
离
2
+
投
影
2
|\vec{OP}|^2=距离^2+投影^2
∣OP∣2=距离2+投影2,投影最大了那么距离肯定 就是最小了。
OK,我们假设要找的方向向量为
v
v
v ,那么
A
A
A 所有的行 作为
R
5
R^5
R5 上的点在
v
v
v 上的投影为:
A
6
×
5
v
5
×
1
A_{6\times5}v_{5\times 1}
A6×5v5×1 ,这是一个列向量,第
i
i
i 元素表示第
i
i
i 个点的投影值,这些投影的平方和:
(
A
v
)
T
(
A
v
)
(Av)^T (Av)
(Av)T(Av),显然这是一个随着
v
v
v变化的函数,记为
f
(
v
)
=
(
A
v
)
T
(
A
v
)
f(v)=(Av)^T (Av)
f(v)=(Av)T(Av),我们求这个函数在
v
v
v是单位方向向量的条件下的最大值。
即:
m
a
x
f
(
v
)
=
(
A
v
)
T
(
A
v
)
max \space f(v)=(Av)^T (Av)
max f(v)=(Av)T(Av)
s
.
t
.
v
T
v
=
1
s.t. \space \space v^Tv=1
s.t. vTv=1
为什么要约束
v
v
v 是单位向量?因为只有
v
v
v 是单位向量的时候,
A
v
Av
Av的每个元素才是点在这个方向的投影值。
对于这个带约束的优化问题,我们引入拉个朗日因子,使得问题变成没有约束:
m
a
x
h
(
v
,
λ
)
=
(
A
v
)
T
(
A
v
)
−
λ
(
v
T
v
−
1
)
max \space h(v,\lambda)=\space (Av)^T (Av)-\lambda(v^Tv-1)
max h(v,λ)= (Av)T(Av)−λ(vTv−1)
同时我们也会得到拉格朗日乘子的物理意义。
然后,对 h ( v , λ ) h(v,\lambda) h(v,λ) 求偏导,使得偏导为0,得到取得最优解的条件: A T A v = λ v A^T Av=\lambda v ATAv=λv, 可以看出 v v v 就是矩阵 A T A A^T A ATA 的特征向量,而 λ \lambda λ 是 A T A A^T A ATA 的特征值。
我们使用numpy 求出 v v v 和 λ \lambda λ 来。
>>> import numpy as np
>>> A=np.mat([[1,1,1,0,0],
[3,3,3,0,0],
[4,4,4,0,0],
[5,5,5,0,0],
[0,2,0,4,4],
[0,0,0,5,5],
[0,1,0,2,2]])
求 v , λ v,\lambda v,λ:
>>> _lambda,_v=np.linalg.eig(A.T *A)
得到:
λ
\lambda
λ=array([ 1.55775728e+02, 9.04137413e+01, -2.78499845e-15, 1.81053094e+00, 2.46519033e-32])。我们只取最大的两个特征值:155.775和90.413.
同样的,我们把_v里面的第0,1列保留下来,把第2,3,4列丢掉。
值得注意的是
v
v
v 的每一列的模都是 1 (即
v
T
v
=
1
v^T v=1
vTv=1) !.
>>> v=_v[:,0:2] ==>取前最大特征值对应的那两列
>>> v
matrix([[ 0.56225841, 0.12664138],
[ 0.5928599 , -0.02877058],
[ 0.56225841, 0.12664138],
[ 0.09013354, -0.69537622],
[ 0.09013354, -0.69537622]])
>>> v.T * v ===>v都是单位方向向量!
matrix([[1.00000000e+00, 2.74951927e-17],
[2.74951927e-17, 1.00000000e+00]])
>>> _lambda=_lambda[0:2] ==>取两个最大的特征值
>>> _lambda
array([155.77572778, 90.41374128])
找到的这两个方向向量说明,这6个人的评分构成的6个 R 5 R^5 R5 向量 在这两个方向上的投影平方和最大。而这两个方向其实就是对应两种 潜在人格:爱好科幻电影以及爱好爱情电影。任何一个用户在这两个方向的投影,其实就是他的两种潜在人格的偏重。
而且我们还能得出:在这两个方向上的投影平方和其实就是刚刚引入的拉格朗日乘子 λ \lambda λ。 正是因为 λ \lambda λ 的这种物理意义使得我们应该取最大的特征值以及对应的特征向量,因为在这些方向上 投影平方和最大,信息损失最小。
首先从理论上分析,因为投影平方和是 ( A v ) T A v (Av)^TAv (Av)TAv, 而 ( A v ) T A v = v T ( A T A v ) = v T ( λ v ) = λ v T v = λ (Av)^TAv=v^T(A^TAv)=v^T(\lambda v)=\lambda v^Tv=\lambda (Av)TAv=vT(ATAv)=vT(λv)=λvTv=λ。
其次,在数值上验证:
>>> A*v ===> A的所有行在v上的投影
matrix([[ 1.71737671, 0.22451218],
[ 5.15213013, 0.67353654],
[ 6.86950685, 0.89804872],
[ 8.58688356, 1.12256089],
[ 1.9067881 , -5.62055093],
[ 0.90133537, -6.9537622 ],
[ 0.95339405, -2.81027546]])
>>> (A*v).T *(A*v) ===>投影的平方和
matrix([[ 1.55775728e+02, -7.06352805e-16],
[-7.06352805e-16, 9.04137413e+01]])
只看对角元的话,就是对应的
λ
\lambda
λ ,或者说我们把v的两列分别取出来观察。
取出第一列,
A
v
1
Av_1
Av1 表示这6个人在第一种人格 上的投影:
>>> A*v[:,0]
matrix([[1.71737671],
[5.15213013],
[6.86950685],
[8.58688356],
[1.9067881 ],
[0.90133537],
[0.95339405]])
这个投影向量的模长的平方也就是 λ 1 \lambda_1 λ1的值155.775:
>>> (A*v[:,0]).T*(A*v[:,0])
matrix([[155.77572778]])
如果我们把 A v 1 Av_1 Av1 给单位化一下: A v 1 ∣ A v 1 ∣ \frac{Av_1}{|Av_1|} ∣Av1∣Av1 或者 A v 1 λ 1 \frac{Av_1}{\sqrt{\lambda_1}} λ1Av1 得到:
>>> A*v[:,0]/np.sqrt(_lambda[0])
matrix([[0.13759913],
[0.41279738],
[0.5503965 ],
[0.68799563],
[0.15277509],
[0.07221651],
[0.07638754]])
这玩意就是SVD里面
U
U
U表这些6个用户的第一人格投影得到的特征向量。
同样,我们取出
v
v
v的第二列来:
A
v
2
Av_2
Av2 表示 这六个用户在第二种人格上的投影:
>>> A*v[:,1]
matrix([[ 0.22451218],
[ 0.67353654],
[ 0.89804872],
[ 1.12256089],
[-5.62055093],
[-6.9537622 ],
[-2.81027546]])
同样它的模长的平方也是对应的 λ 2 \lambda_2 λ2的值 90.413
>>> (A*v[:,1]).T *A*v[:,1]
matrix([[90.41374128]])
然后把 A v 2 Av_2 Av2 单位化: A v 2 ∣ A v 2 ∣ \frac{Av_2}{|Av_2|} ∣Av2∣Av2或者 A v 2 λ 2 \frac{Av_2}{\sqrt{\lambda_2}} λ2Av2得到
>>> A*v[:,1]/np.sqrt(_lambda[1])
matrix([[ 0.02361145],
[ 0.07083435],
[ 0.09444581],
[ 0.11805726],
[-0.59110096],
[-0.73131186],
[-0.29555048]])
这玩意就是SVD里面
U
U
U表这些6个用户的第二人格投影得到的特征向量。
把这两列人格投影堆在一起,于是得到
U
U
U:
>>> U
matrix([[ 0.137, 0.023],
[ 0.412, 0.07 ],
[ 0.55 , 0.094],
[ 0.687, 0.118],
[ 0.152, -0.591],
[ 0.072, -0.731],
[ 0.076, -0.295]])
然后,我们把模长也写成矩阵 σ \sigma σ
>>> sigma
matrix([[12.48101469, 0. ],
[ 0. , 9.50861406]])
于是可以得到: A v σ = U \frac{Av}{\sigma}=U σAv=U,即: A v = U σ Av=U\sigma Av=Uσ
>>> A*v-U*sigma ===>验证码左右两边是否相等
matrix([[ 0.0074777 , 0.00581406],
[ 0.00995208, 0.00793355],
[ 0.00494877, 0.00423899],
[ 0.01242646, 0.00054444],
[ 0.00967387, -0.00096002],
[ 0.00270231, -0.00296532],
[ 0.00483693, -0.00523432]])
可以看到,
A
v
−
U
σ
Av-U\sigma
Av−Uσ 的差很小。
两边再右乘一个矩阵
v
T
v^T
vT,得到:
A
=
U
σ
v
T
A=U\sigma v^T
A=UσvT.
这个就是我们想要的SVD分解了!

















 1447
1447

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









