







参考
相关文章
平滑度成本函数
Smac 用向量和的模的平方来作为曲线离散点的平滑度,非常巧妙。
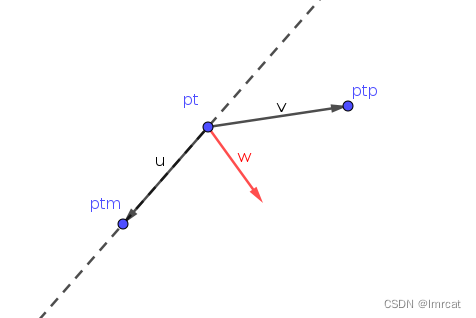
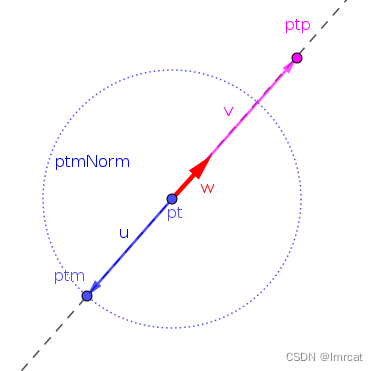
离散点顺序: pt_m -> pt -> pt_p
向量 u 是 pt -> pt_m,向量 v 是 pt -> pt_p,向量 w = u + v。
下面蓝色圆形虚线 ptmNorm 表示向量 u 的模,紫色圆形虚线 ptpNorm 表示向量 v 的模。
1. 在 u 和 v 的模大小固定情况下,夹角 α 从大到小变化([0,π]范围),此时 w 的模是从小到大变化。

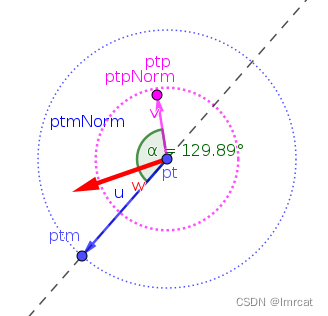
这个性质反映了向量的方向同向程度,方向越接近 w 模越大。
性质用作离散曲线点的平滑度成本函数,w 模越大反映曲线越扭曲迂回,w 模越小反映曲线越平滑前进。
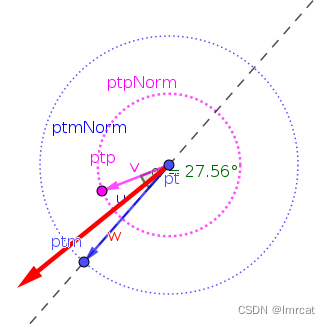
2. 在 u 和 v 的夹角固定,u 的模大小固定情况下
a. 当 v 的模在 ptmNorm 之内,即 v 的模小于 u 的模。v 的模从小到大变化,此时 w 的模是从大到小变化。

b. 当 v 的模在 ptmNorm 之外,即 v 的模大于 u 的模。v 的模从小到大变化,此时 w 的模是从小到大变化。

这个性质反映了向量的模差异程度,向量的模差越大,w 模越大。
该性质用作离散曲线点的平滑度成本函数,w 模越大反映离散点分布越混乱,w 模越小反映离散点分布越均匀。
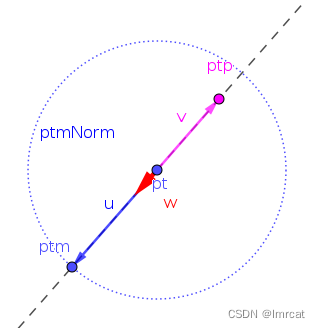
任意 v 向量情况下的 w 情况如下
平滑度成本函数为:
是 pt_m -> pt 向量,
是 pt_p-> pt 向量。
具体公式是
源码:
inline void addSmoothingResidual(
const double & weight,
const Eigen::Vector2d & pt,
const Eigen::Vector2d & pt_p,
const Eigen::Vector2d & pt_m,
double & r) const
{
r += weight * (
pt_p.dot(pt_p) -
4 * pt_p.dot(pt) +
2 * pt_p.dot(pt_m) +
4 * pt.dot(pt) -
4 * pt.dot(pt_m) +
pt_m.dot(pt_m)); // objective function value
}平滑度成本梯度函数
对平滑度成本函数中 pt 变量求偏导,由于求偏导将与自变量无关项视作常量,常量求导为 0,所以在这里只需要关心平滑度成本函数中与自变量 pt 相关的项即可。
提取平滑度成本函数中 pt 相关项:
矩阵表示:
源码:
inline void addSmoothingJacobian(
const double & weight,
const Eigen::Vector2d & pt,
const Eigen::Vector2d & pt_p,
const Eigen::Vector2d & pt_m,
double & j0,
double & j1) const
{
j0 += weight *
(-4 * pt_m[0] + 8 * pt[0] - 4 * pt_p[0]); // xi x component of partial-derivative
j1 += weight *
(-4 * pt_m[1] + 8 * pt[1] - 4 * pt_p[1]); // xi y component of partial-derivative
}














 4411
4411











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









