






深蓝学院 ROS第七章学习记录
摄像头参数标定
- 安装标定功能包
sudo apt-get install ros-kinetic-camera-calibration
- 启动笔记本自带摄像头
将这个文件下载到自己的catkin_ws/src文件夹中
git clone https://github.com/bosch-ros-pkg/usb_cam.git
cd ~/catkin_ws (cd到你自己的catkin_ws地址里)
catkin_make
直接启动节点
roslaunch usb_cam usb_cam-test.launch
此处与课件中的启动方法不同
- 接下来是摄像头的标定
首先我们需要打印一个标定纸,大小和格子尺寸均没所谓。把其贴在一个硬纸板上
启动标定包,启动路径任意
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.028 image:=/usb_cam/image_raw camera:=/usb_cam
size,是棋盘格内部的角点个数,注意这里一点要写对,注意是内部的个数 8x6
square:是每个棋盘格的边长 ,unit:m
然后将标定板举起,在标定viewer中就可以看到识别到了我们的标定纸,进行各轴移动及旋转。
直至四个参数均为绿色点击calibration,等待片刻。点击save,和commit保存文件yaml
至此标定结束
在home文件夹下ctrl+h打开隐藏文件,在.ros文件夹中有camera_info, yaml文件就在其中。
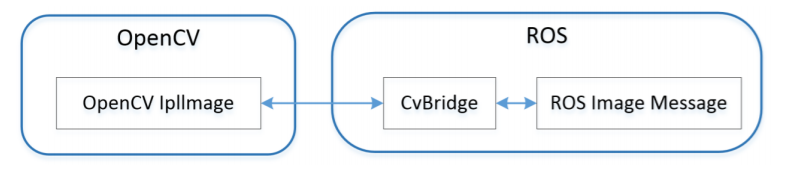
- Opencv与ROS
Opencv 与 ROS 之间的图像处理转换需要利用CvBridge
测试程序
roslaunch robot_vision usb_cam.launch // opencv中
rosrun robot_vision cv_bridge_test.py
rqt_image_view //ros中
此处出现了一个问题当执行第二行命令时显示无法找到当前程序,需要我们点击文件的属性,PERMISSIONS中勾选allow executing file as program
- 程序分析
#!/usr/bin/env python
# -*- coding: utf-8 -*-
//在这个程序中我们的目的是将ROS图像消息转换为Opencv图像数据
//在这里我们学习了两个新的函数
//imgmsg_to_cv2() : 将ROS图像消息转换为Opencv图像数据
//cv2_to_imgmsg() : 将Opencv格式的图像数据转化成ROS图像信息
//编写思路:当有消息传来时,将数据代入到callback函数中进行数据转化,再通过发布者发布出来.
import rospy
import cv2
from cv_bridge import CvBridge, CvBridgeError
from sensor_msgs.msg import Image
class image_converter:
def __init__(self):
# 创建cv_bridge,声明图像的发布者和订阅者
self.image_pub = rospy.Publisher("cv_bridge_image", Image, queue_size=1)
self.bridge = CvBridge()
self.image_sub = rospy.Subscriber("/usb_cam/image_raw", Image, self.callback)
def callback(self,data):
# 使用cv_bridge将ROS的图像数据转换成OpenCV的图像格式
try:
cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")
except CvBridgeError as e:
print e
# 在opencv的显示窗口中绘制一个圆,作为标记
(rows,cols,channels) = cv_image.shape
if cols > 60 and rows > 60 :
cv2.circle(cv_image, (60, 60), 30, (0,0,255), -1)
# 显示Opencv格式的图像
cv2.imshow("Image window", cv_image)
cv2.waitKey(3)
# 再将opencv格式额数据转换成ros image格式的数据发布
try:
self.image_pub.publish(self.bridge.cv2_to_imgmsg(cv_image, "bgr8"))
except CvBridgeError as e:
print e
if __name__ == '__main__':
try:
# 初始化ros节点
rospy.init_node("cv_bridge_test")
rospy.loginfo("Starting cv_bridge_test node")
image_converter()
rospy.spin()
except KeyboardInterrupt:
print "Shutting down cv_bridge_test node."
cv2.destroyAllWindows()
- 人脸识别
*启动人脸识别实例
roslaunch robot_vision usb_cam.launch
roslaunch robot_vision face_detector.launch
rqt_image_view
人脸识别的流程图
基于Haar特征的级联分类器对象检测算法

程序
#!/usr/bin/env python
# -*- coding: utf-8 -*-
//该程序主要看image_callback函数中
import rospy
import cv2
import numpy as np
from sensor_msgs.msg import Image, RegionOfInterest
from cv_bridge import CvBridge, CvBridgeError
class faceDetector:
def __init__(self):
rospy.on_shutdown(self.cleanup);
# 创建cv_bridge
self.bridge = CvBridge()
self.image_pub = rospy.Publisher("cv_bridge_image", Image, queue_size=1)
# 获取haar特征的级联表的XML文件,文件路径在launch文件中传入
cascade_1 = rospy.get_param("~cascade_1", "")
cascade_2 = rospy.get_param("~cascade_2", "")
# 使用级联表初始化haar特征检测器
self.cascade_1 = cv2.CascadeClassifier(cascade_1)
self.cascade_2 = cv2.CascadeClassifier(cascade_2)
# 设置级联表的参数,优化人脸识别,可以在launch文件中重新配置
self.haar_scaleFactor = rospy.get_param("~haar_scaleFactor", 1.2)
self.haar_minNeighbors = rospy.get_param("~haar_minNeighbors", 2)
self.haar_minSize = rospy.get_param("~haar_minSize", 40)
self.haar_maxSize = rospy.get_param("~haar_maxSize", 60)
self.color = (50, 255, 50)
# 初始化订阅rgb格式图像数据的订阅者,此处图像topic的话题名可以在launch文件中重映射
self.image_sub = rospy.Subscriber("input_rgb_image", Image, self.image_callback, queue_size=1)
def image_callback(self, data):
# 使用cv_bridge将ROS的图像数据转换成OpenCV的图像格式
try:
cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")
frame = np.array(cv_image, dtype=np.uint8)
except CvBridgeError, e:
print e
# 创建灰度图像
grey_image = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 创建平衡直方图,减少光线影响
grey_image = cv2.equalizeHist(grey_image)
# 尝试检测人脸
faces_result = self.detect_face(grey_image)
# 在opencv的窗口中框出所有人脸区域
if len(faces_result)>0:
for face in faces_result:
x, y, w, h = face
cv2.rectangle(cv_image, (x, y), (x+w, y+h), self.color, 2)
# 将识别后的图像转换成ROS消息并发布
self.image_pub.publish(self.bridge.cv2_to_imgmsg(cv_image, "bgr8"))
def detect_face(self, input_image):
# 首先匹配正面人脸的模型
if self.cascade_1:
faces = self.cascade_1.detectMultiScale(input_image,
self.haar_scaleFactor,
self.haar_minNeighbors,
cv2.CASCADE_SCALE_IMAGE,
(self.haar_minSize, self.haar_maxSize))
# 如果正面人脸匹配失败,那么就尝试匹配侧面人脸的模型
if len(faces) == 0 and self.cascade_2:
faces = self.cascade_2.detectMultiScale(input_image,
self.haar_scaleFactor,
self.haar_minNeighbors,
cv2.CASCADE_SCALE_IMAGE,
(self.haar_minSize, self.haar_maxSize))
return faces
def cleanup(self):
print "Shutting down vision node."
cv2.destroyAllWindows()
if __name__ == '__main__':
try:
# 初始化ros节点
rospy.init_node("face_detector")
faceDetector()
rospy.loginfo("Face detector is started..")
rospy.loginfo("Please subscribe the ROS image.")
rospy.spin()
except KeyboardInterrupt:
print "Shutting down face detector node."
cv2.destroyAllWindows()
- 启动物体跟踪实例
roslaunch robot_vision usb_cam.launch
roslaunch robot_vision motion_detector.launch
rqt_image_view
- 本讲作业















 708
708











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









