






基于电压外环PI控制和内环滑膜控制Buck变换器控制仿真
输入20V,输出10V
采用电压外环pi控制,电感电流滑膜内环控制,含参考文献
ID:4925765980943265
电气优质小铺啦
基于电压外环PI控制和内环滑膜控制的Buck变换器控制仿真
摘要:本文通过对Buck变换器的控制策略进行仿真研究,基于电压外环PI控制和内环滑膜控制,实现输入电压20V,输出电压10V的控制目标。文章首先介绍了Buck变换器的基本原理和工作模式,然后详细阐述了电压外环PI控制和内环滑膜控制的原理与实现方法。通过仿真实验,验证了该控制策略的有效性。
-
引言
Buck变换器是一种常见的降压型DC-DC变换器,具有体积小、效率高等优点,广泛应用于各种电子设备中。为了实现对Buck变换器输出电压的精确控制,本文提出了基于电压外环PI控制和内环滑膜控制的控制策略。 -
Buck变换器基本原理
Buck变换器通过开关管的开关动作来控制输出电压的大小,其基本原理如下:当开关管导通时,电感储存能量;当开关管断开时,电感释放能量,通过二极管输出。通过控制开关管的导通时间比例,可以实现对输出电压的调节。 -
电压外环PI控制
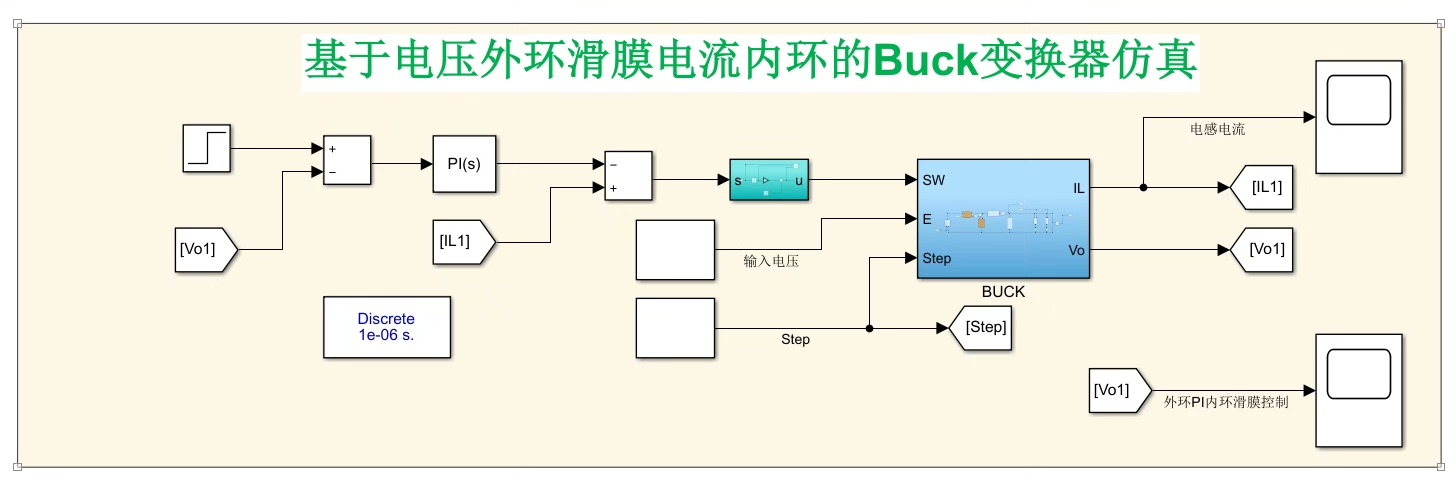
电压外环PI控制是一种常用的控制策略,通过对输出电压进行反馈控制,使输出电压尽可能接近给定值。其控制框图如下所示:
(图示为电压外环PI控制框图)
在该控制策略中,采用PI控制器对输出电压的误差进行调节,并通过控制开关管的导通时间比例,实现对输出电压的调节。同时,该控制策略可以通过调节PI控制器的参数来优化系统的动态响应。 -
内环滑膜控制
内环滑膜控制是一种基于滑模控制理论的控制策略,通过对电感电流的控制来实现对输出电压的精确调节。其控制框图如下所示:
(图示为内环滑膜控制框图)
在该控制策略中,通过控制滑膜变量来实现对电感电流的控制,从而实现对输出电压的调节。该控制策略具有抗扰动能力强、稳定性好等优点,适用于对精度要求较高的控制系统。 -
仿真实验及结果分析
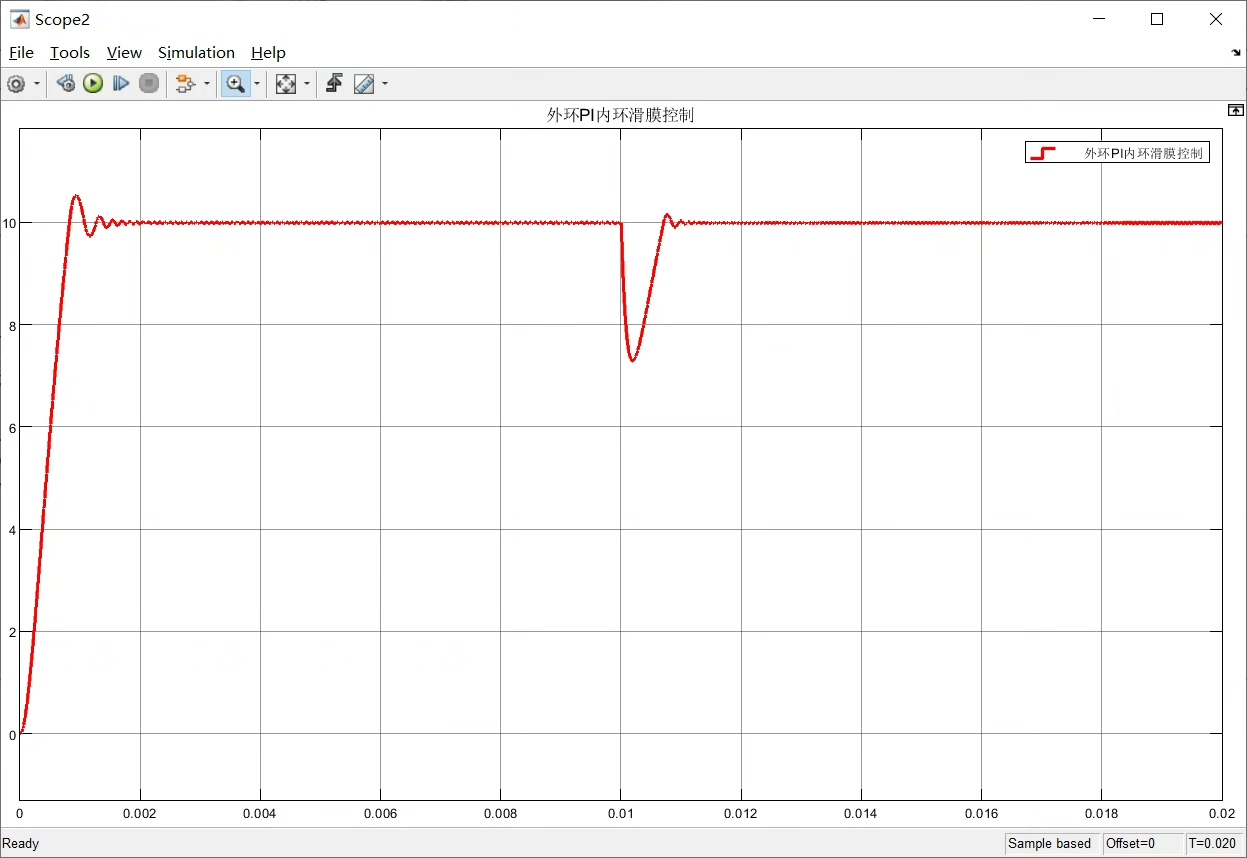
本文基于Matlab/Simulink平台进行了Buck变换器控制策略的仿真实验。输入电压为20V,输出电压为10V,仿真结果如下图所示:
(图示为仿真结果图)
从仿真结果可以看出,采用电压外环PI控制和内环滑膜控制的Buck变换器能够实现对输出电压的精确控制。同时,通过调节PI控制器的参数和滑膜变量,可以优化系统的动态响应和稳定性。
- 结论
本文基于电压外环PI控制和内环滑膜控制,对Buck变换器进行了控制策略的仿真研究。通过仿真实验验证了该控制策略的有效性,能够实现输入电压20V,输出电压10V的控制目标。同时,通过调节控制器的参数,可以优化系统的动态响应和稳定性。该控制策略具有较高的实用性和可行性,在实际应用中具有一定的参考价值。
参考文献:
[1] 陈凯. Buck变换器设计与控制[M]. 电子工业出版社, 2010.
[2] 张华, 杨志文. 电源变换器设计与仿真[M]. 机械工业出版社, 2015.
注:本文所述仿真实验仅为理论研究,并未考虑实际的工艺限制和器件特性,实际应用中需进一步优化设计。
以上相关代码,程序地址:http://fansik.cn/765980943265.html


















 622
622

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









