







预备知识
为了更好的理解分布式相关的内容,需要提前熟悉一些基本概念和特定的名称。分布式训练涉及到设备端(CPU,GPU),算法端(梯度更新,反向传播)等基本概念,具体陈述如下:
-
基本概念
网络参数:【w,b】是训练过程中,需要更新的参数,也称为权重和偏置;w 的更新公式如下,
w ∗ = w − α ⋅ ∂ E ∂ w (1) w^*=w-\alpha\cdot \frac{\partial E}{\partial w} \tag1 w∗=w−α⋅∂w∂E(1)
注: w ∗ w^* w∗ 是待更新的权重参数, w w w 是上一次迭代的权重参数, α \alpha α 是学习率(w更新的步长), ∂ E ∂ w \frac{\partial E}{\partial w} ∂w∂E 表示梯度,w 更新的方向。
损失函数:网络的输出与真实标签的误差项,训练过程就是不断的最小化误差项 E,得到最优的网络参数【w,b】,
E = ∑ x ∣ ∣ f w ( x ) − y ∣ ∣ 2 (2) E = \sum_x||f_w(x)-y||^2 \tag2 E=x∑∣∣fw(x)−y∣∣2(2)
前向传播:上述公式(2)中的 f w ( x ) f_w(x) fw(x) 表示前向计算过程,x是输入,y是标签;
反向传播:对上述(2)进行链式求导,可以得到全部【w,b】的偏导数(梯度),然后应用公式(1)更新参数【w,b】; -
反向传播
关于反向传播的具体推导过程,可以参考链接:https://zhuanlan.zhihu.com/p/40378224,作者写的非常详细,【通俗易懂】,要仔细看看。 -
分布式特定名称
group:进程组,一般就需要一个默认的,通常使用较少;
world size:全局进程总数量;
rank:进程的ID,0为主进程,一个进程可以控制多个GPU;
local_rank:某个节点上的进程id,隐式参数,torch自动分配;
local_word_size:单个节点上的进程数量,通常很少用到;图示上述概念,官方参考链接:DDP基本概念及理论, 其它参考链接:分布式相关概念(详细)
官方图例解析:假设有两台机器或者节点(NODE),每个机器上有4块GPU,图中有4个进程,即【world_size=4】,进程ID rank=【0,1,2,3】。每一个进程控制【2】块GPU设备。通常情况下,综合考虑设备IO、负载,一般为每一个进程分配【1】块GPU 设备。

DP
DP (DataParallel) 是单进程,多线程的工作模式,针对单机多卡训练的情况。DP 执行过程中,始终会有一个主GPU来【汇总】和【分发】数据(包括每个GPU的输出,梯度值,网络参数等),通常【0号】GPU被称为主GPU。
-
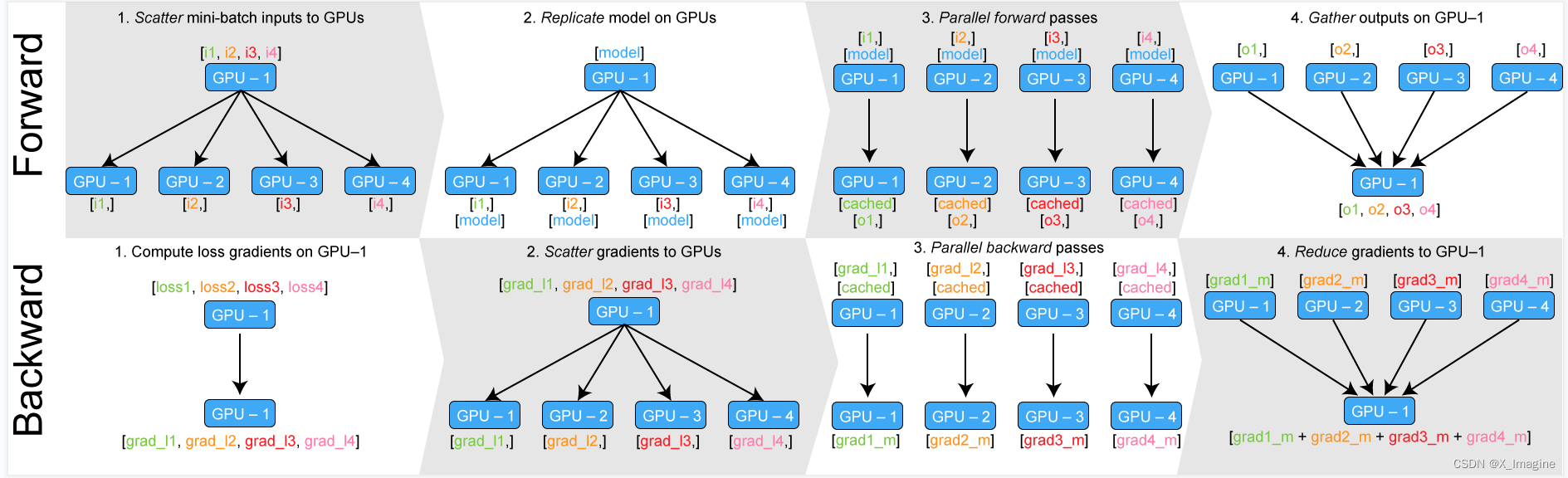
GPU数据更新逻辑
- 主GPU将输入数据(images)平均分发到其它GPU,同时也将模型以及初始的模型参数分发到其它GPU,因此初始的网络参数是一样的,输入图像数据是不同的;
- 各个GPU独立进行网络前向计算,得到输出;
- 主GPU将网络输出汇总到主GPU,结合真实的标签值,计算损失,然后对损失求导,记 ∂ l o s s \partial loss ∂loss,然后将该导数分发到其它GPU;
- 每个GPU得到 ∂ l o s s \partial loss ∂loss 后,独立进行反向传播(链式求导),得到所有网络参数的偏导数,也即是梯度;
- 主GPU将各个GPU的梯度汇总到主GPU,得到平均梯度。根据公式(1)更新网络参数【w,b】,然后将新更新的网络参数分发至其它GPU,这样每个GPU的网络参数依然保持一致;
- 循环上述过程,至训练结束;
下图的引用链接为:Training Neural Nets on Larger Batches: Practical Tips for 1-GPU, Multi-GPU & Distributed setups
-
DP的不足
显卡负载:主GPU的负载较大,通常显存占用比其它显卡大很多。
通信开销:假设有 N 个 GPU, 完成一次通信需要时间 t,总共需要花费时间
T = 2 ( N − 1 ) ⋅ t T=2(N-1)\cdot t T=2(N−1)⋅t
性能瓶颈:Global Interpreter Lock (GIL)全局解释器锁,简单来说就是,一个 Python 进程只能利用一个 CPU kernel,即单核多线程并发时,只能执行一个线程。考虑多核,多核多线程可能出现线程颠簸 (thrashing) 造成资源浪费,所以 Python 想要利用多核最好是多进程。 -
实例展示
YOLO-V5 中的DP使用方式如下,只需添加一行代码即可,如下代码片段所示,# DP mode if cuda and RANK == -1 and torch.cuda.device_count() > 1: LOGGER.warning('WARNING: DP not recommended, use torch.distributed.run for best DDP Multi-GPU results.\n' 'See Multi-GPU Tutorial at https://github.com/ultralytics/yolov5/issues/475 to get started.') # 只需添加该行代码即可,其它不必动 model = torch.nn.DataParallel(model)
DDP
DDP (DistributedDataParallel) 是多进程的工作方式,针对多机多卡(也包含单机多卡)。与 DP 不同的是,不需要全程使用主GPU来汇总和分发数据。
-
GPU更新逻辑
(1) 各个GPU独立的从硬盘加载输入数据,加载相同的模型;
(2) 各个GPU独立的进行前向传播,损失计算,反向传播;
(3) 每两个相邻的GPU进行梯度的汇总和分发;
(4) 各个GPU进行独立的更新网络参数; -
梯度汇总分发策略
对于GPU之间的数据传递,主要采用【The Ring Allreduce】策略。几乎查阅了全网的资源,很少能够解析的比较全面,并且通俗易懂。经过仔细筛选和对比,可以仔细阅读【参考链接,2.,3. 】,详细讲解了DDP的梯度更新策略,并且很容易理解。如果后面有时间,我会详细解析该内容。 -
通信时间
假设有N个GPU,将传输的梯度分为N份,那么汇总需要传递N-1次,分发需要N-1次。假设传输的数据总量为K,则总的传输时间为,
T = 2 ( N − 1 ) ⋅ K N T = 2(N-1)\cdot \frac{K}{N} T=2(N−1)⋅NK
注:通过上式可以看到,通信时间几乎与GPU数量无关。 -
示例展示
YOLO-V5 中的DDP使用方式如下,主要包含两部分:首先,初始化线程组(L12);然后调用【DDP】API 接口,拷贝模型;代码片段如下所示,# DDP mode device = select_device(opt.device, batch_size=opt.batch_size) if LOCAL_RANK != -1: msg = 'is not compatible with YOLOv5 Multi-GPU DDP training' assert not opt.image_weights, f'--image-weights {msg}' assert not opt.evolve, f'--evolve {msg}' assert opt.batch_size != -1, f'AutoBatch with --batch-size -1 {msg}, please pass a valid --batch-size' assert opt.batch_size % WORLD_SIZE == 0, f'--batch-size {opt.batch_size} must be multiple of WORLD_SIZE' assert torch.cuda.device_count() > LOCAL_RANK, 'insufficient CUDA devices for DDP command' torch.cuda.set_device(LOCAL_RANK) device = torch.device('cuda', LOCAL_RANK) dist.init_process_group(backend="nccl" if dist.is_nccl_available() else "gloo") # DDP mode if cuda and RANK != -1: model = DDP(model, device_ids=[LOCAL_RANK], output_device=LOCAL_RANK)
DP和DDP对比
- 在DP模式中,总共只有一个进程(受到GIL很强限制),DDP 采用多进程,避免了GIL的限制。
- DP 的通信成本随着 GPU 数量线性增长,而 DDP 支持
Ring AllReduce,其通信成本是恒定的,与 GPU 数量无关。 - DDP 模式下,每一个GPU的显存占用是基本相同的,负载基本一致;
- 分布式训练时,基本就使用 DDP模式;
YOLO-V5 实际使用
机器配置:单机,Ubuntu,四张显卡,2080Ti,12G 显存
-
单机单卡
python train.py --data coco.yaml --epochs 300 --weights '' --cfg yolov5s.yaml --batch-size 32 -
DP
DP 训练速度较慢,与单卡训练相比,速度提升有限,不建议使用
python train.py --batch 32 --data coco.yaml --weights '' --cfg yolov5s.yaml --device 0,1 -
DDP
nproc_per_node:指定GPU的数量;
device:指定具体使用的 GPU ID;
batch:总共的batch,下面的例子,每一个GPU的输入数据数量为【 64/2=32】;python -m torch.distributed.run --nproc_per_node 2 train.py --batch 64 --data coco.yaml --weights '' --cfg yolov5s.yaml --device 0,1

















 801
801

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









