How could machines learn as efficiently as humans and animals? How could machines learn to reason and plan? How could machines learn representations of percepts and action plans at multiple levels of abstraction, enabling them to reason, predict, and plan at multiple time horizons? This position paper proposes an architecture and training paradigms with which to construct autonomous intelligent agents. It combines concepts such as configurable predictive world model, behavior driven through intrinsic motivation, and hierarchical joint embedding architectures trained with self-supervised learning.
This document is not a technical nor scholarly paper in the traditional sense, but a position paper expressing my vision for a path towards intelligent machines that learn more like animals and humans, that can reason and plan, and whose behavior is driven by intrinsic objectives, rather than by hard-wired programs, external supervision, or external rewards. Many ideas described in this paper (almost all of them) have been formulated by many authors in various contexts in various form. The present piece does not claim priority for any of them but presents a proposal for how to assemble them into a consistent whole. In particular, the piece pinpoints the challenges ahead. It also lists a number of avenues that are likely or unlikely to succeed.
The text is written with as little jargon as possible, and using as little mathematical prior knowledge as possible, so as to appeal to readers with a wide variety of backgrounds including neuroscience, cognitive science, and philosophy, in addition to machine learning, robotics, and other fields of engineering. I hope that this piece will help contextualize some of the research in AI whose relevance is sometimes difficult to see.
Animals and humans exhibit learning abilities and understandings of the world that are far beyond the capabilities of current AI and machine learning (ML) systems.
动物和人类表现出的学习能力和对世界的理解远远超出了当前人工智能和机器学习(ML)系统的能力。
How is it possible for an adolescent to learn to drive a car in about 20 hours of practice and for children to learn language with what amounts to a small exposure. How is it that most humans will know how to act in many situation they have never encountered? By contrast, to be reliable, current ML systems need to be trained with very large numbers of trials so that even the rarest combination of situations will be encountered frequently during training. Still, our best ML systems are still very far from matching human reliability in real-world tasks such as driving, even after being fed with enormous amounts of supervisory data from human experts, after going through millions of reinforcement learning trials in virtual environments, and after engineers have hardwired hundreds of behaviors into them.
一个青少年可能在大约 20 小时的练习中学会开车,而孩子可能只需要少量接触就可以学习语言。大多数人怎么会知道如何在他们从未遇到过的许多情况下采取行动?相比之下,为了可靠,当前的 ML 系统需要经过大量试验进行训练,以便在训练期间经常遇到最罕见的情况组合。尽管如此,我们最好的 ML 系统在现实世界任务(例如驾驶)中仍远未达到人类可靠性,即使在从人类专家那里获得大量监督数据之后,在虚拟环境中经历了数百万次强化学习试验之后,以及在工程师将数百种行为硬连线到其中之后
The answer may lie in the ability of humans and many animals to learn world models, internal models of how the world works. There are three main challenges that AI research must address today:
1. How can machines learn to represent the world, learn to predict, and learn to act largely by observation? Interactions in the real world are expensive and dangerous, intelligent agents should learn as much as they can about the world without interaction (by observation) so as to minimize the number of expensive and dangerous trials necessary to learn a particular task.
2. How can machine reason and plan in ways that are compatible with gradient-based learning? Our best approaches to learning rely on estimating and using the gradient of a loss, which can only be performed with differentiable architectures and is difficult to reconcile with logic-based symbolic reasoning.
3. How can machines learn to represent percepts and action plans in a hierarchical manner, at multiple levels of abstraction, and multiple time scales? Humans and many animals are able to conceive multilevel abstractions with which long-term predictions and long-term planning can be performed by decomposing complex actions into sequences of lower-level ones.
The present piece proposes an architecture for intelligent agents with possible solutions to all three challenges. The main contributions of this paper are the following:
这篇文章提出了一个智能代理的架构,为所有这三个挑战提供了可能的解决方案。本文的主要贡献如下:
1. an overall cognitive architecture in which all modules are differentiable and many of them are trainable (Section 3, Figure 2).
1.一个整体的认知架构,其中所有的模块都是可微分的,其中许多是可训练的(第3节,图2)。
2. JEPA and Hierarchical JEPA: a non-generative architecture for predictive world models that learn a hierarchy of representations (Sections 4.4 and 4.6, Figures 12 and 15).
3. a non-contrastive self-supervised learning paradigm that produces representations that are simultaneously informative and predictable (Section 4.5, Figure 13).
3.一种非对比的自我监督学习范式,它产生的表示同时具有信息性和可预测性(第4.5节,图13)。
4. A way to use H-JEPA as the basis of predictive world models for hierarchical planning under uncertainty (section 4.7, Figure 16 and 17).
Impatient readers may prefer to jump directly to the aforementioned sections and figures.
不耐烦的读者可能喜欢直接跳到前面提到的章节和图表。
2.1 Learning World Models
Human and non-human animals seem able to learn enormous amounts of background knowledge about how the world works through observation and through an incomprehensibly small amount of interactions in a task-independent, unsupervised way. It can be hypothesized that this accumulated knowledge may constitute the basis for what is often called common sense. Common sense can be seen as a collection of models of the world that can tell an agent what is likely, what is plausible, and what is impossible. Using suchworld models, animals can learn new skills with very few trials. They can predict the consequences of their actions, they can reason, plan, explore, and imagine new solutions to problems. Importantly, they can also avoid making dangerous mistakes when facing an unknown situation.
The idea that humans, animals, and intelligent systems use world models goes back a long time in psychology (Craik, 1943). The use of forward models that predict the next state of the world as a function of the current state and the action being considered has been standard procedure in optimal control since the 1950s (Bryson and Ho, 1969) and bears the name model-predictive control. The use of differentiable world models in reinforcement learning has long been neglected but is making a comeback (see for example (Levine, 2021))
A self-driving system for cars may require thousands of trials of reinforcement learning to learn that driving too fast in a turn will result in a bad outcome, and to learn to slow down to avoid skidding. By contrast, humans can draw on their intimate knowledge of intuitive physics to predict such outcomes, and largely avoid fatal courses of action when learning a new skill.
Common sense knowledge does not just allow animals to predict future outcomes, but also to fill in missing information, whether temporally or spatially. It allows them to produce interpretations of percepts that are consistent with common sense. When faced with an ambiguous percept, common sense allows animals to dismiss interpretations that are not consistent with their internal world model, and to pay special attention as it may indicate a dangerous situation and an opportunity for learning a refined world model.
I submit that devising learning paradigms and architectures that would allow machines to learn world models in an unsupervised (or self-supervised) fashion, and to use those models to predict, to reason, and to plan is one of the main challenges of AI and ML today. One major technical hurdle is how to devise trainable world models that can deal with complex uncertainty in the predictions.
Humans and non-human animals learn basic knowledge about how the world works in the first days, weeks, and months of life. Although enormous quantities of such knowledge are acquired quite quickly, the knowledge seems so basic that we take it for granted. In the first few months of life, we learn that the world is three-dimensional. We learn that every source of light, sound, and touch in the world has a distance from us. The fact that every point in a visual percept has a distance is the best way to explain how our view of the world changes from our left eye to our right eye, or when our head is being moved. Parallax motion makes depth obvious, which in turn makes the notion of object obvious, as well as the fact that objects can occlude more distant ones. Once the existence of objects is established, they can be automatically assigned to broad categories as a function of their appearance or behavior. On top of the notion of object comes the knowledge that objects do not spontaneously appear, disappear, change shape, or teleport: they move smoothly and can only be in one place at any one time. Once such concepts are acquired, it becomes easy to learn that some objects are static, some have predictable trajectories (inanimate objects), some behave in somewhat unpredictable ways (collective phenomena like water, sand, tree leaves in the wind, etc), and some seem to obey different rules (animate objects). Notions of intuitive physics such as stability, gravity, inertia, and others can emerge on top of that. The effect of animate objects on the world (including the effects of the subject’s own actions) can be used to deduce cause-and-effect relationships, on top of which linguistic and social knowledge can be acquired.
Figure 1, courtesy of Emmanuel Dupoux, shows at what age infants seem to acquire basic concepts such as object permanence, basic categories, intuitive physics, etc. Concepts at higher levels of abstraction seem to develop on top of lower-level ones.
Equipped with this knowledge of the world, combined with simple hard-wired behaviors and intrinsic motivations/objectives, animals can quickly learn new tasks, predict the consequences of their actions and plan ahead, foreseeing successful courses of actions and avoiding dangerous situations.
But can a human or animal brain contain all the world models that are necessary for survival? One hypothesis in this paper is that animals and humans have only one world model engine somewhere in their prefrontal cortex. That world model engine is dynamically configurable for the task at hand. With a single, configurable world model engine, rather than a separate model for every situation, knowledge about how the world works may be shared across tasks. This may enable reasoning by analogy, by applying the model configured for one situation to another situation.
To make things concrete, I will directly dive into a description of the proposed model.
为了使事情具体化,我将直接进入对提议的模型的描述。
3 自主智能模型构架
Figure 2: A system architecture for autonomous intelligence. All modules in this model are assumed to be “differentiable”, in that a module feeding into another one (through an arrow connecting them) can get gradient estimates of the cost’s scalar output with respect to its own output.
The configurator module takes inputs (not represented for clarity) from all other modules and configures them to perform the task at hand.
配置模块从所有其他模块获取输入(为清楚起见未示出),并对它们进行配置以执行手头的任务。
The perception module estimates the current state of the world.
感知模块估计世界的当前状态。
The world model module predicts possible future world states as a function of imagined actions sequences proposed by the actor.
世界模型模块根据行动者提出的想象动作序列来预测可能的未来世界状态。
The cost module computes a single scalar output called “energy” that measures the level of discomfort of the agent. It is composed of two sub-modules, the intrinsic cost, which is immutable (not trainable) and computes the immediate energy of the current state (pain, pleasure, hunger, etc), and the critic, a trainable module that predicts future values of the intrinsic cost.
The short-term memory module keeps track of the current and predicted world states and associated intrinsic costs.
短期记忆模块跟踪当前和预测的世界状态以及相关的内在成本。
The actor module computes proposals for action sequences. The world model and the critic compute the possible resulting outcomes.The actor can find an optimal action sequence that minimizes the estimated future cost, and output the first action in the optimal sequence. See Section 3 for details.details.
The proposed architecture for autonomous intelligent agents is depicted in Figure 2.
自治智能代理的架构如图2所示。
It is composed of a number of modules whose functions are described below. Some of the modules are configurable on the fly, i.e. their precise function is determined by the configurator module. The role of the configurator is executive control: given a task to be executed, it pre-configures the perception, the world model, the cost and the actor for the task at hand. The configurator modulates the parameters of the modules it feeds into.
The configurator module takes input from all other modules and configures them for the task at hand by modulating their parameters and their attention circuits. In particular, the configurator may prime the perception, world model, and cost modules to fulfill a particular goal.
The perception module receives signals from sensors and estimates the current state of the world. For a given task, only a small subset of the perceived state of the world is relevant and useful. The perception module may represent the state of the world in a hierarchical fashion, with multiple levels of abstraction. The configurator primes the perception system to extract the relevant information from the percept for the task at hand.
The world model module constitutes the most complex piece of the architecture. Its role is twofold: (1) estimate missing information about the state of the world not provided by perception, (2) predict plausible future states of the world. The world model may predict natural evolutions of the world, or may predict future world states resulting from a sequence of actions proposed by the actor module. The world model may predict multiple plausible world states, parameterized by latent variables that represent the uncertainty about the world state. The world model is a kind of “simulator” of the relevant aspects of world. What aspects of the world state is relevant depends on the task at hand. The configurator configures the world model to handle the situation at hand. The predictions are performed within an abstract representation space that contains information relevant to the task at hand. Ideally, the world model would manipulate representations of the world state at multiple levels of abstraction, allowing it to predict over multiple time scales.
A key issue is that the world model must be able to represent multiple possible predictions of the world state. The natural world is not completely predictable. This is particularly true if it contains other intelligent agents that are potentially adversarial. But it is often true even when the world only contains inanimate objects whose behavior is chaotic, or whose state is not fully observable.
There are two essential questions to answer when building the proposed architectures: (1) How to allow the world model to make multiple plausible prediction and represent uncertainty in the predictions, and (2) how to train the world model.
The cost module measures the level of “discomfort” of the agent, in the form of a scalar quantity called the energy. The energy is the sum of two energy terms computed by two sub-modules: the Intrinsic Cost module and the Trainable Critic module. The overall objective of the agent is to take actions so as to remain in states that minimize the average energy.
The Intrinsic Cost module is hard-wired (immutable, non trainable) and computes a single scalar, the intrinsic energy that measures the instantaneous “discomfort” of the agent– think pain (high intrinsic energy), pleasure (low or negative intrinsic energy), hunger, etc. The input to the module is the current state of the world, produced by the perception module, or potential future states predicted by the world model. The ultimate goal of the agent is minimize the intrinsic cost over the long run. This is where basic behavioral drives and intrinsic motivations reside. The design of the intrinsic cost module determines the nature of the agent’s behavior. Basic drives can be hard-wired in this module. This may include feeling “good” (low energy) when standing up to motivate a legged robot to walk, when influencing the state of the world to motivate agency, when interacting with humans to motivate social behavior, when perceiving joy in nearby humans to motivate empathy, when having a full energy supplies (hunger/satiety), when experiencing a new situation to motivate curiosity and exploration, when fulfilling a particular program, etc. Conversely, the energy would be high when facing a painful situation or an easily-recognizable dangerous situation (proximity to extreme heat, fire, etc), or when wielding dangerous tools. The intrinsic cost module may be modulated by the configurator, to drive different behavior at different times.
The Trainable Critic module predicts an estimate of future intrinsic energies. Like the intrinsic cost, its input is either the current state of the world or possible states predicted by the world model. For training, the critic retrieves past states and subsequent intrinsic costs stored in the associative memory module, and trains itself to predict the latter from the former. The function of the critic module can be dynamically configured by the configurator to direct the system towards a particular sub-goal, as part of a bigger task.
Because both sub-modules of the cost module are differentiable, the gradient of the energy can be back-propagated through the other modules, particularly the world model, the actor and the perception, for planning, reasoning, and learning.
The short-term memory module stores relevant information about the past, current, and future states of the world, as well as the corresponding value of the intrinsic cost. The world model accesses and updates the short-term memory while temporally predicting future (or past) states of the world, and while spatially completing missing information or correcting inconsistent information about the current world state. The world model can send queries to the short-term memory and receive retrieved values, or store new values of states. The critic module can be trained by retrieving past states and associated intrinsic costs from the memory. The architecture may be similar to that of Key-Value Memory Networks (Miller et al., 2016) This module can be seen as playing some of same roles as the hippocampus in vertebrates.
The actor module computes proposals for sequences of actions and outputs actions to the effectors. The actor proposes a sequence of actions to the world model. The world model predicts future world state sequences from the action sequence, and feeds it to the cost. Given a goal defined by the cost (as configured by the configurator), the cost computes the estimated future energy associated with the proposed action sequence. Since the actor has access to the gradient of the estimated cost with respect to the proposed action sequence, it can compute an optimal action sequence that minimizes the estimated cost using gradientbased methods. If the action space is discrete, dynamic programming may be used to find an optimal action sequence. Once the optimization is completed, the actor outputs the first action (or a short sequence of actions) to the effectors. This process is akin tomodel-predictive control in optimal control (Bryson and Ho, 1969).
The actor may comprise two components: (1) a policy module that directly produces an action from the world state estimate produced by the perception and retrieved from the short-term memory, and (2) the action optimizer, as described above, for model-predictive control. The first mode is similar to Daniel Kahneman’s “System 1”, while the second mode is similar to “System 2” (Kahneman, 2011)
In the following, we will use specific symbols to represent various components in architectural diagrams. An brief explanation is given in Appendix 8.3.3.
在下文中,我们将使用特定的符号来表示架构图中的各种组件。附录8.3.3给出了简要说明。
3.1 Typical Perception-Action Loops
There are two possible modes that the model can employ for a perception-action episode. The first one involves no complex reasoning, and produces an action directly from the output of the perception and a possible short-term memory access. We will call it “Mode-1”, by analogy with Kahneman’s “System 1”. The second mode involves reasoning and planning through the world model and the cost. It is akin to model-predictive control (MPC), a classical planning and reasoning paradigm in optimal control and robotics. We will call it “Mode-2” by analogy to Kahneman’s “System 2”. We use the term “reasoning” in a broad sense here to mean constraint satisfaction (or energy minimization). Many types of reasoning can be viewed as forms of energy minimization.
Figure 3: Mode-1 perception-action episode. The perception module estimates the state of the world
s
[
0
]
=
E
n
c
(
x
)
s[0] = Enc(x)
s[0]=Enc(x). The actor directly computes an action, or a short sequence of actions, through a policy module
a
[
0
]
=
A
(
s
[
0
]
)
a[0] = A(s[0])
a[0]=A(s[0]).
图3:模式1感知-行动情节。感知模块估计世界的状态
s
[
0
]
=
E
n
c
(
x
)
s[0] = Enc(x)
s[0]=Enc(x)。参与者通过策略模块
a
[
0
]
=
A
(
s
[
0
]
)
a[0] = A(s[0])
a[0]=A(s[0])直接计算一个操作或一个简短的操作序列。
This reactive process does not make use of the world model nor of the cost. The cost module computes the energy of the initial state
f
[
0
]
=
C
(
s
[
0
]
)
f [0] = C(s[0])
f[0]=C(s[0]) and stores the pairs $ (s[0], f [0])$ in the short-term memory. Optionally, it may also predict the next state using the world model
s
[
1
]
=
P
r
e
d
(
s
[
0
]
,
a
[
0
]
)
s[1] = Pred(s[0], a[0])
s[1]=Pred(s[0],a[0]), and the associated energy $f [0] = C(s[0]) $ so that the world model can be adjusted once the next observation resulting from the action taken becomes available.
这种反应过程既不利用世界模型,也不利用成本。代价模块计算初始状态
f
[
0
]
=
C
(
s
[
0
]
)
f [0] = C(s[0])
f[0]=C(s[0])的能量,并将这些对
(
s
[
0
]
,
f
[
0
]
)
(s[0],f [0])
(s[0],f[0])存储在短时记忆中。可选地,它还可以使用世界模型
s
[
1
]
=
P
r
e
d
(
s
[
0
]
,
a
[
0
]
)
s[1] = Pred(s[0],a[0])
s[1]=Pred(s[0],a[0])和相关联的能量
f
[
0
]
=
C
(
s
[
0
]
)
f [0] = C(s[0])
f[0]=C(s[0])来预测下一个状态,使得一旦由所采取的动作产生的下一个观察变得可用,就可以调整世界模型。
A perception-action episode for Mode-1 is depicted in Figure 3.
模式1的感知-动作情节如图3所示。
The perception module, through an encoder module, extracts a representation of the state of the world s[0] = Enc(x) containing relevant information for the task at hand. A policy module, a component of the actor, produces an action as a function of the statea[0] = A(s[0]). The resulting action is sent to the effectors.
The function of the policy module is modulated by the configurator, which configures it for the task at hand.
策略模块的功能由配置器来调节,配置器为手边的任务配置它。
The policy module implements a purely reactive policy that does not involve deliberate planning nor prediction through the world model. Yet, its structure can be quite sophisticated. For example, in addition to the state s[0], the policy module may access the short-term memory to acquire a more complete information about previous world states. It may use the short-term memory for the associative retrieval of an action given the current state.
While the cost module is differentiable, its output f [0] = C(s[0]) is indirectly influenced by previous actions through the external world. Since the world is not differentiable, one cannot back-propagate gradients from the cost through the chain cost ← perception ←world ← action. In this mode, gradients of the cost f [0] with respect to actions can only be estimated by polling the world with multiple perturbed actions, but that is slow and potentially dangerous. This process would correspond to classical policy gradient methods in reinforcement learning.
During Mode-1, the system can optionally adjust the world model. It runs the world model for one step, predicting the next state s[1], then it waits for the next percept resulting from the action taken, and uses the observed world state as a target for the predictor.
With the use of a world model, the agent can imagine courses of actions and predict their effect and outcome, lessening the need to perform an expensive and dangerous search for good actions and policies by trying multiple actions in the external world and measuring the result.
3.1.2 Mode-2: reasoning and planning using the world model(类似于模型预测控制)
Figure 4: Mode-2 perception-action episode. The perception module estimates the state of the worlds[0]. The actor proposes a sequence of actions
a
[
0
]
,
a
[
1
]
,
.
.
.
,
a
[
t
]
,
a
[
t
+
1
]
,
.
.
.
,
a
[
T
]
a[0], a[1], . . . , a[t], a[t + 1], . . . , a[T]
a[0],a[1],...,a[t],a[t+1],...,a[T]. The world model recursively predicts an estimate of the world state sequence using
s
[
t
+
1
]
=
P
r
e
d
(
s
[
t
]
,
a
[
t
]
)
s[t + 1] = Pred(s[t], a[t])
s[t+1]=Pred(s[t],a[t]). The cost
C
(
s
[
t
]
)
C(s[t])
C(s[t]) computes an energy for each predicted state in the sequence, the total energy being the sum of them. Through an optimization or search procedure, the actor infers a sequence of actions that minimizes the total energy. It then sends the first action in the sequence (or the first few actions) to the effectors. This is, in effect, an instance of classical model-predictive control with recedinghorizon planning. Since the cost and the model are differentiable, gradient-based methods can be used to search for optimal action sequences as in classical optimal control. Since the total energy is additive over time, dynamic programming can also be used, particularly when the action space is small and discretized. Pairs of states (computed by the encoder or predicted by the predictor) and corresponding energies from the intrinsic cost and the trainable critic are stored in the short-term memory for subsequent training of the critic.
图4:模式2感知-行动情节。感知模块估计世界的状态[0]。行动者提出了一系列动作
a
[
0
]
,
a
[
1
]
,
.
.
.
.
,
a
[
t
]
,
a
[
t
+
1
]
,
.
.
.
,
a
[
T
]
a[0],a[1],....,a[t],a[t + 1],...,a[T]
a[0],a[1],....,a[t],a[t+1],...,a[T]。世界模型使用
s
[
t
+
1
]
=
P
r
e
d
(
s
[
t
]
,
a
[
t
]
)
s[t + 1] = Pred(s[t],a[t])
s[t+1]=Pred(s[t],a[t])递归地预测世界状态序列的估计。cost
C
(
s
[
t
]
)
C(s[t])
C(s[t])计算序列中每个预测状态的能量,总能量是它们的总和。通过一个优化或搜索过程,行动者推断出一系列行动,使总能量最小化。然后,它将序列中的第一个动作(或前几个动作)发送给效应器。实际上,这是经典模型预测控制的一个实例。由于成本和模型是可微的,基于梯度的方法可以用来搜索最佳行动序列,如在经典的最优控制。由于总能量随着时间的推移而增加,因此也可以使用动态规划,特别是当动作空间很小且被离散化时。(由编码器计算的或由预测器预测的)状态对以及来自内在成本和可训练评价者的相应能量被存储在短期存储器中,用于评价者的后续训练。
A typical perception-action episode for Mode 2 is depicted in Figure 4.
模式2的典型感知-行动情节如图4所示。
1. perception: the perception system extract a representation of the current state of the world s[0] = P (x). The cost module computes and stores the immediate cost associated with that state.
1.感知:感知系统提取一个世界当前状态的表示s[0] = P (x)。成本模块计算并存储与该状态相关联的即时成本。
2. action proposal: the actor proposes an initial sequence of actions to be fed to the world model for evaluation (a[0], . . . , a[t], . . . , a[T ]).
3. simulation: the world model predicts one or several likely sequence of world state representations resulting from the proposed action sequence (s[1], . . . , s[t], . . . , s[T ]).
5. planning: the actor proposes a new action sequence with lower cost. This can be done through a gradient-based procedure in which gradients of the cost are back-propagated through the compute graph to the action variables. The resulting minimum-cost action sequence is denoted (ˇa[0], . . . , ˇa[T ]). Full optimization may require iterating steps 2-5.
6. acting: after converging on a low-cost action sequence, the actor sends the first action (or first few actions) in the low-cost sequence to the effectors. The entire process is repeated for the next perception-action episode.
7. memory: after every action, the states and associated costs from the intrinsic cost and the critic are stored in the short-term memory. These pairs can be used later to train or adapt the critic.
This procedure is essentially what is known as Model-Predictive Control (MPC) with receding horizon in the optimal control literature. The difference with classical optimal control is that the world model and the cost function are learned.
In principle, any form of optimization strategy can be used, for step 5. While gradientbased optimization methods can be efficient when the world model and cost are wellbehaved, situations in which the action-cost mapping has discontinuities may require to use other optimization strategies, particularly if the state and/or action spaces can be discretized. These strategies include dynamic programming, combinatorial optimization, simulate annealing and other gradient-free methods, heuristic search techniques (e.g. tree search with pruning), etc.
To simplify, the process was described in the deterministic case, i.e. when there is no need to handle the possibility of multiple predictions for s[t + 1] resulting from a given initial state s[t] and action a[t]. In real situations, the world is likely to be somewhat unpredictable. Multiple states may result from a single initial state and action due to the fact that the world is intrinsically stochastic (aleatoric uncertainty), or that the state representation s[t] contains incomplete information about the true world state (epistemic uncertainty), or that the world model’s prediction accuracy is imperfect due to limited training data, representational power, or computational constraints.
Figure 5: Training a reactive policy module from the result of Mode-2 reasoning. Using Mode-2 is onerous, because it mobilizes all the resources of the agent for the task at hand. It involves running the world model for multiple time steps repeatedly. This diagram depicts how to train a policy moduleA(s[t]) to approximate the action that results from Mode-2 optimization. The system first operates in Mode-2 and produces an optimal sequence of actions (ˇa[0], . . . , ˇa[T ]). Then the parameters of the policy module are adjusted to minimize a divergence D(ˇa[t]), A(s[t])) between the optimal action and the output of the policy module. This results in a policy module that performs amortized inference, and produces an approximation for a good action sequence. The policy module can then be used to produce actions reactively in Mode-1, or to initialize the action sequence prior to Mode-2 inference and thereby accelerate the optimization. 图5:根据模式2推理的结果训练一个反应策略模块。使用模式2很麻烦,因为它调动了代理的所有资源来完成手头的任务。它包括重复运行多个时间步长的世界模型。此图描述了如何训练策略模块A(s[t])来近似模式2优化产生的动作。系统首先在模式2下运行,并产生一个最佳的动作序列(ˇa[0],。。。ˇa[T ])。然后,调整策略模块的参数,以最小化最佳动作和策略模块的输出之间的偏差D(ˇa[t]),A(s[t])。这导致策略模块执行分期推断,并产生良好动作序列的近似。然后,可以使用策略模块在模式1中反应性地产生动作,或者在模式2推理之前初始化动作序列,从而加速优化。
Using Mode-2 is onerous. The agent only possesses one world model “engine”. It is configurable by the configurator for the task at hand, but it can only be used for a single task at a time. Hence, similarly to humans, the agent can only focus on one complex task at a time.
Mode-1 is considerably less onerous, since it only requires a single pass through a policy module. The agent may possess multiple policy modules working simultaneously, each specialized for a particular set of tasks.
The process described in Figure 5 shows how a policy module
A
(
s
[
t
]
)
A(s[t])
A(s[t]) can be trained to produce approximations of the optimal actions resulting from Mode-2 reasoning. The system is run on Mode-2, producing an optimal action sequence
(
ˇ
a
[
0
]
,
.
.
.
,
ˇ
a
[
t
]
,
.
.
.
,
ˇ
a
[
T
]
)
(ˇa[0], . . . , ˇa[t], . . . , ˇa[T ])
(ˇa[0],...,ˇa[t],...,ˇa[T]). Then, the parameters of the policy module
A
(
s
[
t
]
)
A(s[t])
A(s[t]) are updated to minimize a divergence measure between its output and the optimal action at that time
D
(
ˇ
a
[
t
]
,
A
(
s
[
t
]
)
)
D(ˇa[t], A(s[t]))
D(ˇa[t],A(s[t])). Once properly trained, the policy module can be used to directly produce an action in Mode-1 $ ̃a[0] = A(s[0]) $. It can also be used to recursively compute an initial action sequence proposal before Mode-2 optimization:
图5中描述的过程显示了如何训练策略模块
A
(
s
[
t
]
)
A(s[t])
A(s[t])来产生模式2推理产生的最佳动作的近似。系统以模式2运行,产生最佳动作序列
(
ˇ
a
[
0
]
,。。。ˇ
a
[
t
]
,。。。ˇ
a
[
T
]
)
(ˇa[0],。。。ˇa[t],。。。ˇa[T ])
(ˇa[0],。。。ˇa[t],。。。ˇa[T])。然后,更新策略模块
A
(
s
[
t
]
)
A(s[t])
A(s[t])的参数,以最小化其输出和当时的最优动作
D
(
ˇ
a
[
t
]
,
A
(
s
[
t
]
)
D(ˇa[t],A(s[t])
D(ˇa[t],A(s[t])之间的偏差度量。一旦经过适当的训练,策略模块可以用于直接产生模式-1 $ ̃a[0] = A(s[0]) $中的动作。它还可用于在模式2优化之前递归计算初始动作序列建议:
The policy module can be seen as performing a form of amortized inference. This process allows the agent to use the full power of its world model and reasoning capabilities to acquire new skills that are then “compiled” into a reactive policy module that no longer requires careful planning.
The process of elaborating a suitable action sequence in Mode-2 can be seen as a form of reasoning. This form of reasoning is based on simulation using the world model, and optimization of the energy with respect to action sequences. More generally, the “actions” can be seen as latent variables representing abstract transformations from one state to the next. This type of planning though simulation and optimization may constitute the kind of reasoning that is most frequent in natural intelligence.
Many classical forms of reasoning in AI can actually be formulated as optimization problems (or constraint satisfaction problems). It is certainly the case for the kind of probabilistic inference performed with factor graphs and probabilistic graphical models. The proposed architecture is, in fact, a factor graph in which the cost modules are log factors. But the kind of reasoning that the proposed architecture enables goes beyond traditional logical and probabilistic reasoning. It allows reasoning by simulation and by analogy.
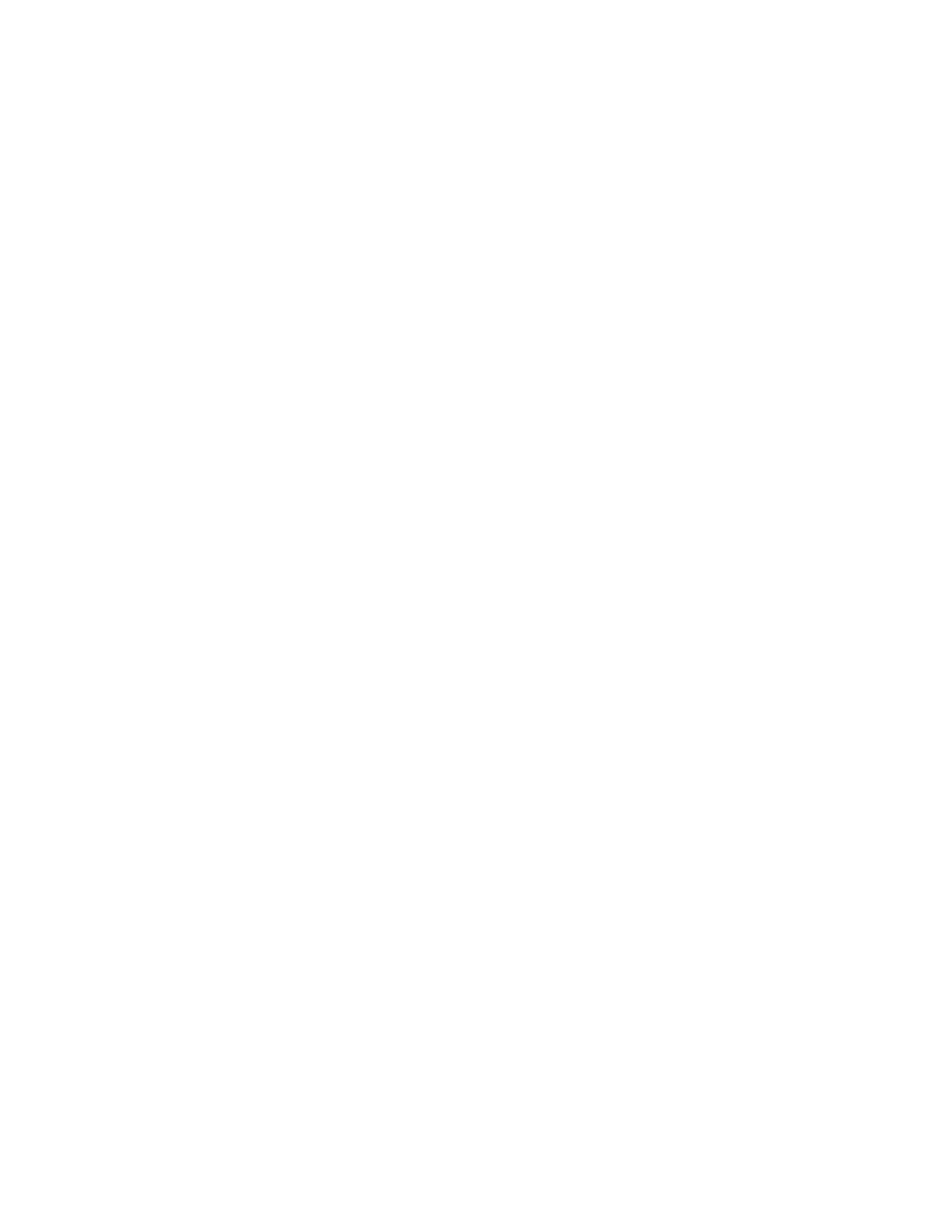
Figure 6: Architecture of the cost module. The cost module comprises the intrinsic cost module which is immutable
I
C
i
(
s
)
IC_i(s)
ICi(s) (left) and the critic or Trainable Cost
T
C
j
(
s
)
TC_j (s)
TCj(s) (right), which is trainable. Both IC and TC are composed of multiple submodules whose output energies are linearly combined. Each submodule imparts a particular behavioral drive in the agent. The weights in the linear combination,
u
i
u_i
ui and
v
j
v_j
vj , are determined by the configurator module and allow the agent to focus on different subgoals at different times. 图6:成本模块的架构。成本模块包括固有成本模块,它是不可变的
I
C
i
(
s
)
IC_i(s)
ICi(s)(左)和the critic或可训练成本
T
C
j
(
s
)
TC_j (s)
TCj(s)(右),它是可训练的。IC和TC都由多个子模块组成,每个子模块的输出能量是线性组合的。每个子模块在代理中赋予特定的行为驱动。线性组合中的权重
u
i
u_i
ui和
v
j
v_j
vj由配置器模块确定,并允许代理在不同时间关注不同的子目标。
The overall architecture of the cost module is shown in Figure 6. It is composed of the intrinsic cost module which is immutable ICi(s) and the critic or Trainable Cost TCj (s), which is trainable. Both IC and TC are composed of multiple submodules whose output energies are linearly combined
成本模块的整体架构如图6所示。它由不可变的
I
C
i
(
s
)
IC_i(s)
ICi(s)和可训练的临界或可训练成本
T
C
j
(
s
)
TC_j (s)
TCj(s)组成。IC和TC都由多个输出能量线性组合的子模块组成
C
(
s
)
=
I
C
(
s
)
+
T
C
(
s
)
(1)
C(s) = IC(s) + TC(s) \tag{1}
C(s)=IC(s)+TC(s)(1)
I
C
(
s
)
=
∑
i
=
1
k
u
i
I
C
i
(
s
)
(2)
IC(s) = \sum_{i=1}^k u_iIC_i(s) \tag{2}
IC(s)=i=1∑kuiICi(s)(2)
T
C
(
s
)
=
∑
j
=
1
l
v
i
T
C
j
(
s
)
(3)
TC(s) =\sum_{j=1}^l v_iTC_j(s) \tag{3}
TC(s)=j=1∑lviTCj(s)(3)
Each submodule imparts a particular behavioral drive to the agent. The weights in the linear combination, ui and vj , are modulated by the configurator module and allow the agent to focus on different subgoals at different times.
每个子模块向代理赋予特定的行为驱动。线性组合中的权重
u
i
u_i
ui和
v
j
v_j
vj由配置器模块调整,并允许代理在不同时间关注不同的子目标。
The intrinsic cost module (IC) is where the basic behavioral nature of the agent is defined. It is where basic behaviors can be indirectly specified.
内在成本模块(ic)是定义代理的基本行为性质的地方。这是可以间接指定基本行为的地方。
For a robot, these terms would include obvious proprioceptive measurements corresponding to “pain”, “hunger”, and “instinctive fears”, measuring such things as external force overloads, dangerous electrical, chemical, or thermal environments, excessive power consumption, low levels of energy reserves in the power source, etc.
They may also include basic drives to help the agent learn basic skills or accomplish its missions. For example, a legged robot may comprise an intrinsic cost to drive it to stand up and walk. This may also include social drives such as seeking the company of humans, finding interactions with humans and praises from them rewarding, and finding their pain unpleasant (akin to empathy in social animals). Other intrinsic behavioral drives, such as curiosity, or taking actions that have an observable impact, may be included to maximize the diversity of situations with which the world model is trained (Gottlieb et al., 2013)
The IC can be seen as playing a role similar to that of the amygdala in the mammalian brain and similar structures in other vertebrates.
IC的作用可以被看作类似于哺乳动物大脑中的杏仁核和其他脊椎动物中的类似结构。
To prevent a kind of behavioral collapse or an uncontrolled drift towards bad behaviors, the IC must be immutable and not subject to learning (nor to external modifications).
The role of the critic (TC) is twofold: (1) to anticipate long-term outcomes with minimal use of the onerous world model, and (2) to allow the configurator to make the agent focus on accomplishing subgoals with a learned cost.
In general, the behavioral nature of an AI agent can be specified in four ways:
一般来说,人工智能主体的行为本质可以用四种方式来描述:
1. by explicitly programming a specific behavior activated when specific conditions are met
1.通过显式编程在满足特定条件时激活特定行为
2. by defining an objective function in such a way that the desired behavior is executed by the agent as a result of finding action sequences that minimize the objective.
2。通过以这样的方式定义一个目标函数,即作为找到最小化目标的动作序列的结果,期望的行为由代理执行。
3. by training the agent to behave a certain way through direct supervision. The agent observes the actions of an expert teacher, and trains a Mode-1 policy module to reproduce it.
3.通过直接监督训练代理人的行为方式。代理观察专家教师的行为,并训练模式1策略模块来再现它。
4. by training the agent through imitation learning. The agent observes expert teachers, and infers an objective function that their behavior appears to be optimizing when they act. This produces a critic submodule for Mode-2 behavior. This process is sometimes called inverse reinforcement learning.
The second method is considerably simpler to engineer than the first one, because it merely requires to design an objective, and not design a complete behavior. The second method is also more robust: a preordained behavior may be invalidated by unexpected conditions or a changing environment. With an objective, the agent may adapt its behavior to satisfy the objective despite unexpected conditions and changes in the environment. The second method exploits the learning and inference abilities of the agent to minimize the amount of priors hard-wired by the designer that are likely to be brittle.
An essential question is how to train the critic. The principal role of the critic is to predict future values of the intrinsic energy. To do so, it uses the short-term memory module. This module is an associative memory in which the intrinsic cost module stores triplets (time, state, intrinsic energy): (τ, sτ , IC(sτ )). The stored states and corresponding intrinsic energies may correspond to a perceived state or to a state imagined by the world model during a Mode-2 episode. The memory may retrieve a state sτ given a time τ , and may retrieve an energy IC(sτ ) given a time τ or a state sτ . With a suitable memory architecture, the retrieval may involve interpolations of keys and retrieved values. The process is shown in Figure 7
The critic can be trained to predict future intrinsic energy values by retrieving a past state vector
s
τ
s_τ
sτ together with an intrinsic energy at a later time
I
C
(
s
τ
+
δ
)
IC(s_{τ +δ} )
IC(sτ+δ). The parameters of the critic can then be optimized to minimize a prediction loss, for example
∣
∣
I
C
(
s
τ
+
δ
)
−
T
C
(
s
τ
)
∣
∣
2
||IC(s_{τ +δ} ) −T C(s_τ )||^2
∣∣IC(sτ+δ)−TC(sτ)∣∣2. This is a simple scenario. More complex schemes can be devised to predict expectations of discounted future energies, or distributions thereof. Note that the state vectors may contain information about the actions taken or imagined by the actor.
可以训练评论家通过检索过去的状态向量
s
τ
s_τ
sτ以及稍后时间
I
C
(
s
τ
+
δ
)
IC(s_{τ +δ} )
IC(sτ+δ)的内在能量来预测未来的内在能量值。然后可以优化critic的参数,使预测损耗最小,例如
∣
∣
I
C
(
s
τ
+
δ
)
−
T
C
(
s
τ
)
∣
∣
2
||IC(s_{τ +δ} ) −T C(s_τ )||^2
∣∣IC(sτ+δ)−TC(sτ)∣∣2。这是一个简单的场景。可以设计更复杂的方案来预测未来能量折扣的期望值或其分布。请注意,状态向量可能包含有关行动者采取或想象的行动的信息。
At a general level, this is similar to critic training methods used in such reinforcement learning approaches as A2C.
总的来说,这类似于A2C等强化学习方法中使用的批评训练方法。
The short-term memory can be implemented as the memory module in a key-value memory network ??: a query vector is compared to a number of key vectors, producing a vector of scores. The scores are normalized and used as coefficients to output a linear combination of the stored values. It can be seen as a “soft” associative memory capable of interpolation. One advantage of it is that, with a proper allocation scheme of new key/value slots, it is capable of one-shot learning, yet can interpolate between keys and is end-to-end differentiable.
Arguably, designing architectures and training paradigms for the world model constitute the main obstacles towards real progress in AI over the next decades. One of the main contributions of the present proposal is precisely a hierarchical architecture and a training procedure for world models that can represent multiple outcomes in their predictions.
Training the world model is a prototypical example of Self-Supervised Learning (SSL), whose basic idea is pattern completion. The prediction of future inputs (or temporarily unobserved inputs) is a special case of pattern completion. In this work, the primary purpose of the world model is seen as predicting future representations of the state of the world.
There are three main issues to address. First, quite evidently, the quality of the world model will greatly depend on the diversity of state sequences, or triplets of (state, action, resulting state) it is able to observe while training. Second, because the world is not entirely predictable, there may be multiple plausible world state representations that follow a given world state representation and an action from the agent. The world model must be able to meaningfully represent this possibly-infinite collection of plausible predictions. Third, the world model must be able to make predictions at different time scales and different levels of abstraction.
The first issue touches on one of the main questions surrounding learning for sequential decision processes: the diversity of the “training set” depends on the actions taken. The issue is discussed in Section 4.10 below.
The second issue is even more dire: the world is not entirely predictable. Hence, the world model should be able to represent multiple plausible outcomes from a given state and (optionally) an action. This may constitute one of the most difficult challenges to which the present proposal brings a solution. This issue is discussed in Section 4.8 below.
The third issue relates to the problem of long-term prediction and planning. Humans plan complex goals at an abstract level and use high-level descriptions of the world states and actions to make predictions. High-level goals are then decomposed into sequences of more elementary sequences of subgoals, using shorter-term prediction from the world model to produce lower-level actions. This decomposition process is repeated all the way down to millisecond-by-millisecond muscle control, informed by local conditions. The question of how world models could represent action plans at multiple time scales and multiple levels of abstraction is discussed in Section 4.6
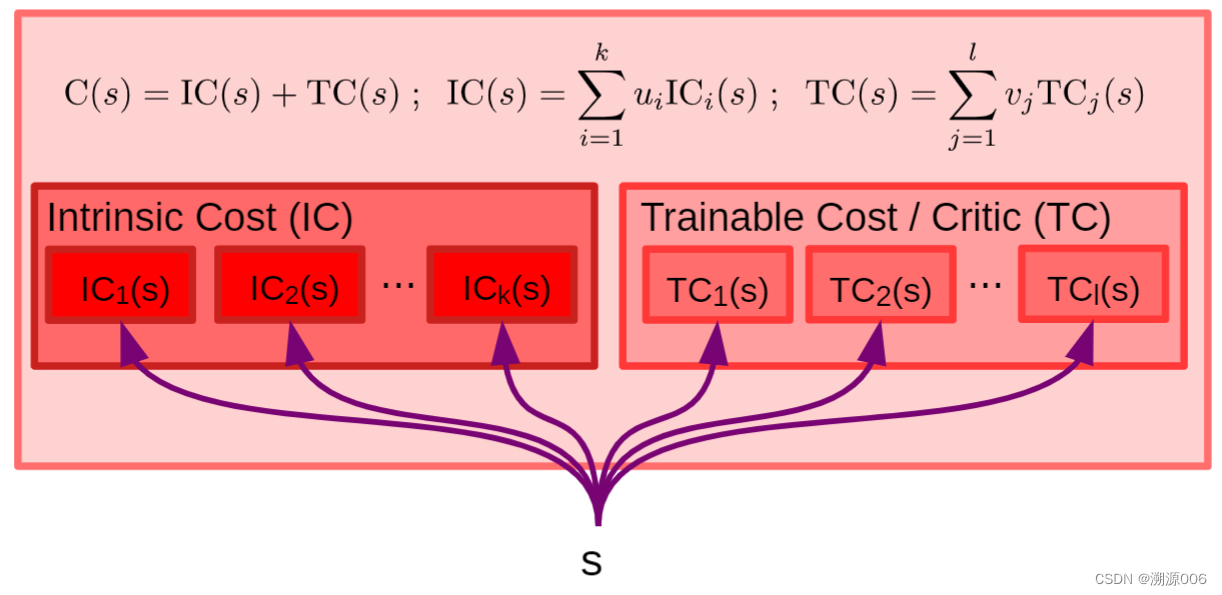
Figure 8: Self-Supervised Learning (SSL) and Energy-Based Models (EBM). SSL is a learning paradigm in which a learning system is trained to “fill in the blanks”, or more precisely to capture the dependencies between observed parts of the input and possibly unobserved parts of the input. Part of the input signal is observed and denoted x (in pink), and part of the input signal is either observed or unobserved and denoted y (in blue). In a temporal prediction scenario, x represents past and present observations, and y represent future observations. In a general pattern completion scenario, various parts of the input may be observed or unobserved at various times. The learning system is trained to capture the dependencies between x and y through a scalar-valued energy function F (x, y)that takes low values when x and y are consistent or compatible, and higher values if x and y are inconsistent or incompatible. In a video prediction scenario, the system would produce a low energy value if a video clip y is a plausible continuation of the video clip x. This energy-based model (EBM) formulation enables the system to represent multi-modal dependencies in which multiple values of y(perhaps an infinite set) may be compatible with a given x. In the right panel, an energy landscape is represented in which dark discs represent data points, and closed lines represents contours (level sets) of the energy function. 图8:自我监督学习(SSL)和基于能量的模型(EBM)。SSL是一种学习范式,其中学习系统被训练为“填空”,或者更准确地说,捕捉输入的观察部分和输入的可能未观察部分之间的依赖关系。输入信号的一部分被观察到并表示为x(粉红色),输入信号的一部分被观察到或未被观察到并表示为y(蓝色)。在时间预测场景中,x表示过去和现在的观测值,y表示未来的观测值。在一般的模式完成场景中,输入的各个部分可能在不同的时间被观察到或未被观察到。学习系统被训练成通过标量值能量函数F (x,y)来捕捉x和y之间的依赖性,当x和y一致或兼容时,该标量值能量函数F(x,y)取低值,而如果x和y不一致或不兼容,则取较高值。在视频预测场景中,如果视频剪辑y是视频剪辑x的似是而非的延续,则系统将产生低能量值。这种基于能量的模型(EBM)公式使系统能够表示多模态依赖性,其中y的多个值(可能是无穷集合)可以与给定的x兼容。在右侧面板中,表示了能量景观,其中黑色圆盘表示数据点,而闭合线表示能量函数的轮廓(水平集)。
Self-Supervised Learning (SSL) is a paradigm in which a learning system is trained to capture the mutual dependencies between its inputs. Concretely, this often comes down to training a system to tell us if various parts of its input are consistent with each other.
For example, in a video prediction scenario, the system is given two video clips, and must tell us to what degree the second video clip is a plausible continuation of the first one. In a pattern completion scenario, the system is given part of an input (image, text, audio signal) together with a proposal for the rest of the input, and tells us whether the proposal is a plausible completion of the first part. In the following, we will denote the observed part of the input by x and the possibly-unobserved part by y.
Importantly, we do not impose that the model be able to predict y from x. The reason is that there may be an infinite number of y that are compatible with a given x. In a video prediction setting, there is an infinite number of video clips that are plausible continuations of a given clip. It may be difficult, or intractable, to explicitly represent the set of plausible predictions. But it seems less inconvenient to merely ask the system to tell us if a proposedy is compatible with a given x.
A general formulation can be done with the framework of Energy-Based Models (EBM). The system is a scalar-valued function F (x, y) that produces low energy values when x andy are compatible and higher values when they are not. The concept is depicted in Figure 8. Data points are black dots. The energy function produces low energy values around the data points, and higher energies away from the regions of high data density, as symbolized by the contour lines of the energy landscape. The EBM implicit function formulation enables the system to represent multi-modal dependencies in which multiple values of y are compatible with a given x. The set of y compatible with a given x may be a single point, multiple discrete points, a manifold, or a collection of points and manifolds.
To enable Mode-2 planning, a predictive world model should be trained to capture the dependencies between past and future percepts. It should be able to predict representations of the future from representations of the past and present. The general learning principle is as follows: given two inputs x and y, learn two functions that compute representations
s
x
=
g
x
(
x
)
s_x = g_x(x)
sx=gx(x) and
s
y
=
g
y
(
y
)
s_y = g_y(y)
sy=gy(y) such that (1) sx and sy are maximally informative about x andy and (2) sy can easily be predicted from
s
x
s_x
sx. This principle ensures a trade-off between making the evolution of the world predictable in the representation space, and capturing as much information as possible about the world state in the representation.
为了实现模式2规划,应该训练预测世界模型来捕捉过去和未来感知之间的依赖性。它应该能够从过去和现在的表象中预测未来的表象。一般的学习原理如下:给定两个输入x和y,学习计算表达式
s
x
=
g
x
(
x
)
s_x = g_x(x)
sx=gx(x)和
s
y
=
g
y
(
y
)
s_y = g_y(y)
sy=gy(y)的两个函数,使得(1)
s
x
s_x
sx和
s
y
s_y
sy最大限度地提供关于x和y的信息,以及(2)
s
y
s_y
sy以容易地从
s
x
s_x
sx预测。这一原则确保了在使世界的演变在表示空间中可预测和在表示中捕获尽可能多的关于世界状态的信息之间的平衡。
What concepts could such an SSL system learn by being trained on video? Our hypothesis is that a hierarchy of abstract concepts about how the world works could be acquired.
Learning a representation of a small image region such that it is predictable from neighboring regions surrounding it in space and time would cause the system to extract local edges and contours in images, and to detect moving contours in videos. Learning a representation of images such that the representation of a scene from one viewpoint is predictable from the representation of the same scene from a slightly different viewpoint would cause the system to implicitly represent a depth map. A depth map is the simplest way to explain how a view of a scene changes when the camera moves slightly. Once the notion of depth has been learned, it would become simple for the system to identify occlusion edges, as well as the collective motion of regions belonging to a rigid object. An implicit representation of 3D objects may spontaneously emerge. Once the notion of object emerges in the representation, concepts like object permanence may become easy to learn: objects that disappear behind others due to parallax motion will invariably reappear. The distinction between inanimate and animate object would follow: inanimate object are those whose trajectories are easily predictable. Intuitive physics concepts such as stability, gravity, momentum, may follow by training the system to perform longer-term predictions at the object representation level. One may imagine that through predictions at increasingly abstract levels of representation and increasingly long time scales, more and more complex concepts about how the world works may be acquired in a hierarchical fashion.
The idea that abstract concepts can be learned through prediction is an old one, formulated in various way by many authors in cognitive science, neuroscience, and AI over several decades. The question is how to do it, precisely.
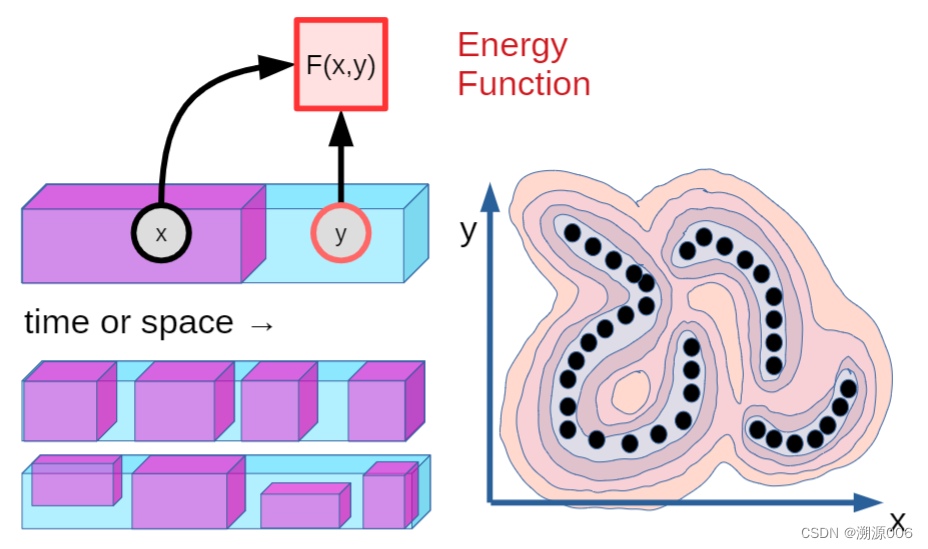
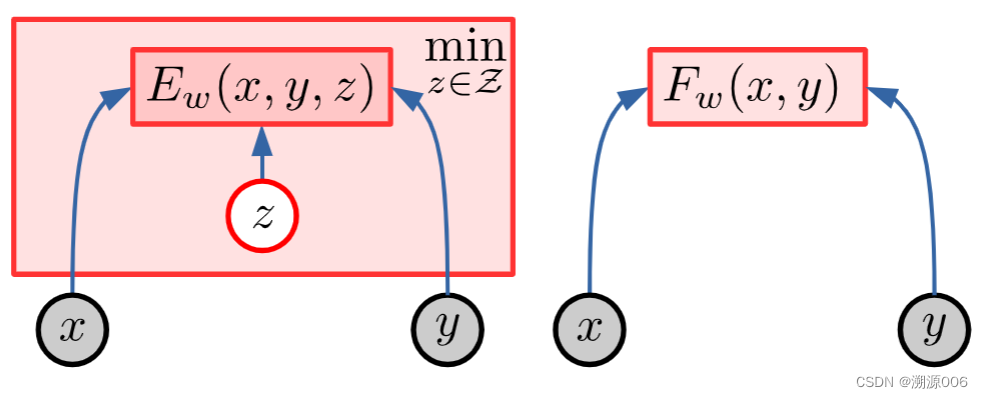
Figure 9: Latent-Variable Energy-Based Model (LVEBM). To evaluate the degree of compatibility between x and y, an EBM may need the help of a latent variablez. The latent variable can be seen as parameterizing the set of possible relationships between an xand a set of compatible y. Latent variables represent information about y that cannot be extracted from x. For example, if x is a view of an object, and y another view of the same object, z may parameterize the camera displacement between the two views. Inference consists in finding the latent that minimizes the energy
ˇ
z
=
a
r
g
m
i
n
z
∈
Z
E
w
(
x
,
y
,
z
)
ˇz = argmin_{z∈Z} E_w(x, y, z)
ˇz=argminz∈ZEw(x,y,z). The resulting energy
F
w
(
x
,
y
)
=
E
w
(
x
,
y
,
ˇ
z
)
F_w(x, y) = E_w(x, y, ˇz)
Fw(x,y)=Ew(x,y,ˇz)only depends on x and y. In the dual view example, inference finds the camera motion that best explains how x could be transformed into y. 图9:基于潜在变量能量的模型(LVEBM)。为了评估x和y之间的相容程度,EBM可能需要潜在变量z的帮助。潜在变量可以被视为参数化xan和一组兼容的y之间的一组可能的关系。潜在变量表示不能从x提取的关于y的信息。例如,如果x是一个对象的视图,而y是同一对象的另一个视图,则z可以参数化两个视图之间的相机位移。推断在于找到使能量最小化的潜在值
ˇ
z
=
a
r
g
m
i
n
z
∈
Z
E
w
(
x
,
y
,
z
)
ˇz = argmin_{z∈Z} E_w(x, y, z)
ˇz=argminz∈ZEw(x,y,z)。产生的能量
F
w
(
x
,
y
)
=
E
w
(
x
,
y
,
ˇ
z
)
F_w(x, y) = E_w(x, y, ˇz)
Fw(x,y)=Ew(x,y,ˇz)仅取决于x和y。在双视图示例中,推理找到了最能解释x如何转换为y的相机运动。
As was pointed out above, one of the main issues is enabling the model to represent multiple predictions. This may require the use of a latent variable. A latent variable is an input variable whose value is not observed but inferred. A latent variable can be seen as parameterizing the set of possible relationships between an x and a set of compatible y. Latent variables are used to represent information about y that cannot be extracted fromx.
Imagine a scenario in which x is a photo of a scene, and y a photo of the same scene from a slightly different viewpoint. To tell whether x and y are indeed views from the same scene, one may need to infer the displacement of the camera between the two views. Similarly, if x is a picture of a car coming to a fork in the road, and y is a picture of the same car a few seconds later on one of the branches of the fork, the compatibility betweenx and y depends on a binary latent variable that can be inferred: did the car turn left or right.
In a temporal prediction scenario, the latent variable represents what cannot be predicted about y (the future) solely from x and from past observations (the past). It should contain all information that would be useful for the prediction, but is not observable, or not knowable. I may not know whether the driver in front of me will turn left or right, accelerate or brake, but I can represent those options by a latent variable.
A latent-variable EBM (LVEBM) is a parameterized energy function that depends on
x
,
y
x, y
x,y, and
z
:
E
w
(
x
,
y
,
z
)
z: E_w(x, y, z)
z:Ew(x,y,z). When presented with a pair
(
x
,
y
)
(x, y)
(x,y) the inference procedure of the EBM finds a value of the latent variable z that minimizes the energy
潜变量EBM (LVEBM)是一个参数化的能量函数,它取决于
x
,
y
x, y
x,y, and
z
:
E
w
(
x
,
y
,
z
)
z: E_w(x, y, z)
z:Ew(x,y,z)。当呈现一对
(
x
,
y
)
(x,y)
(x,y)时,EBM的推理过程找到最小化能量的潜在变量z的值
z
=
a
r
g
m
i
n
z
∈
Z
E
w
(
x
,
y
,
z
)
(4)
z = argmin_{z∈Z}E_w(x, y, z) \tag{4}
z=argminz∈ZEw(x,y,z)(4)
This latent-variable inference by minimization allows us to eliminate z from the energy function:
这种通过最小化的潜在变量推断允许我们从能量函数中消除z:
F
w
(
x
,
y
)
=
m
i
n
z
∈
Z
E
w
(
x
,
y
,
z
)
=
E
w
(
x
,
y
,
ˇ
z
)
(5)
F_w(x, y) = min_{z∈Z }E_w(x, y, z) = E_w(x, y, ˇz) \tag{5}
Fw(x,y)=minz∈ZEw(x,y,z)=Ew(x,y,ˇz)(5)
Technically,
F
w
(
x
,
y
)
F_w(x, y)
Fw(x,y) should be called a zero-temperature free energy, but we will continue to call it the energy.
从技术上讲,
F
w
(
x
,
y
)
F_w(x,y)
Fw(x,y)应该叫做零温自由能,但我们将继续称它为能量。
4.3 Training Energy-Based Models
Before we discuss EBM training, it is important to note that the definition of EBM does not make any reference to probabilistic modeling. Although many EBMs can easily be turned into probabilistic models, e.g. through a Gibbs distribution, this is not at all a necessity. Hence the energy function is viewed as the fundamental object and is not assumed to implicitly represent the unnormalized logarithm of a probability distribution.
Training an EBM consists in constructing an architecture (e.g. a deep neural network) to compute the energy function
F
w
(
x
,
y
)
F_w(x, y)
Fw(x,y) parameterized with a parameter vector w. The training process must seek a w vector that gives the right shape to the energy function. For a given x from the training set, a well-trained
F
w
(
x
,
y
)
F_w(x, y)
Fw(x,y) will produce lower energies for values of y that are associated with x in the training set, and higher energies to other values of y.
训练EBM包括构建一个体系结构(例如深度神经网络)来计算用参数向量w参数化的能量函数
F
w
(
x
,
y
)
F_w(x,y)
Fw(x,y)。训练过程必须寻找一个w向量,该向量给出能量函数的正确形状。对于来自训练集的给定x,训练良好的
F
w
(
x
,
y
)
F_w(x,y)
Fw(x,y)将为与训练集中的x相关联的y值产生较低的能量,并为y的其他值产生较高的能量
Given a training sample (x, y), training an EBM comes down to devising a suitable loss functional L(x, y, Fw(x, y)), which can be expressed directly as a function of the parameter vector L(x, y, w), and such that minimizing this loss will make the energy of the training sample Fw(x, y) lower than the energies Fw(x, ˆy) of any ˆy different from y.
Making the energy of the training sample low is easy: it is sufficient for the loss to be an increasing function of the energy, and for the energy to have a lower bound.
使训练样本的能量变低是容易的:损失是能量的增函数,并且能量具有下限就足够了。
The difficult question is how to ensure that the energies of ˆy different from y are higher than the energy of y. Without a specific provision to ensure that Fw(x, y′) > Fw(x, y) whenever ˆy 6 = y the energy landscape may suffer a collapse: given an x the energy landscape could become “flat”, giving essentially the same energy to all values of y.
What EBM architectures are susceptible to collapse? Whether an EBM may be susceptible to collapse depends on its architecture. Figure 10 shows a number of standard architectures and indicates whether they can be subject to collapse.







 YannLecun提出了一种构建自主智能体的架构和训练范式,旨在让机器如人和动物般高效学习、推理及规划,其核心在于内在动机驱动的行为、多级抽象表示及自我监督学习。此工作综合了现有理念,明确未来挑战,探索实现通用人工智能的新途径。
YannLecun提出了一种构建自主智能体的架构和训练范式,旨在让机器如人和动物般高效学习、推理及规划,其核心在于内在动机驱动的行为、多级抽象表示及自我监督学习。此工作综合了现有理念,明确未来挑战,探索实现通用人工智能的新途径。





















 1022
1022

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









