







Abstract
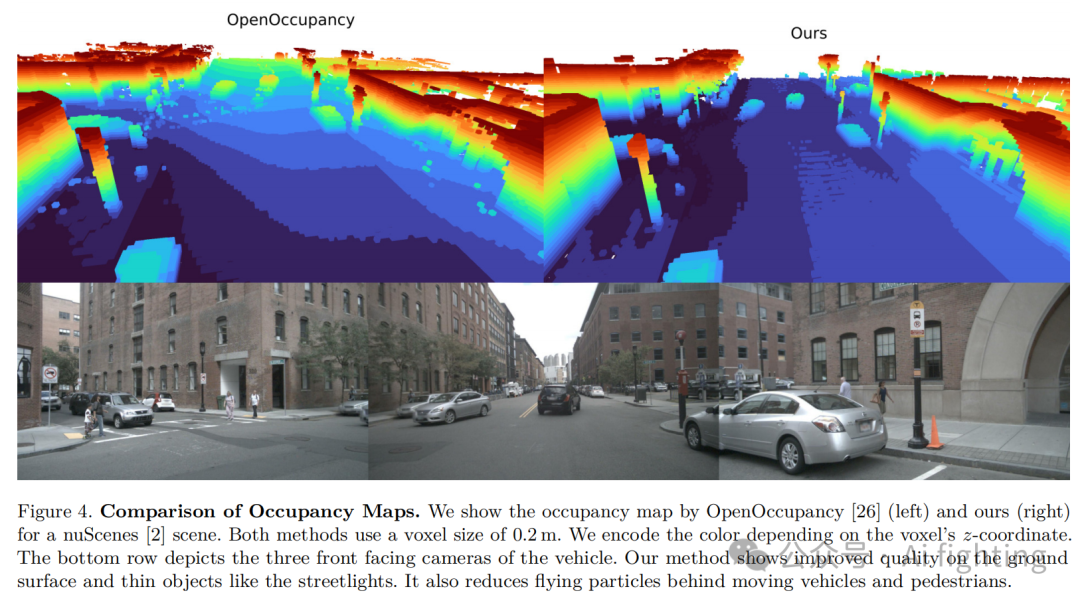
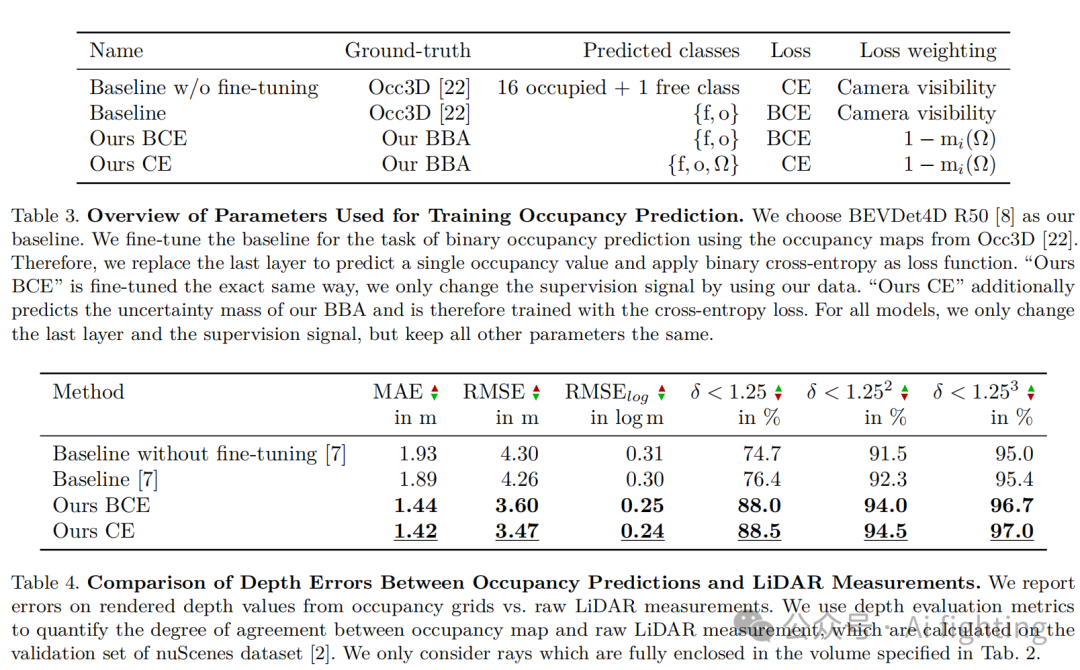
自动驾驶根本上需要对周围场景几何结构的了解。现代方法仅使用捕获的图像来预测表示几何的占用图。训练这些方法需要准确的数据,这些数据可以通过激光雷达扫描仪获得。我们展示了当前基准和训练数据集使用的将激光雷达扫描转换为占用栅格图的技术质量非常低,并提出了一种使用证据理论的新方法,能够产生更准确的重建。我们证明了这些重建在质量和数量上都具有显著优势,并且还能获得有意义的不确定性估计。将占用图转换回深度估计并与原始激光雷达测量结果进行比较时,我们的方法在nuScenes数据集上相对于其他占用地面实况数据的均方误差(MAE)改进了30%到52%,在Waymo数据集上改进了53%。最后,我们使用改进的占用图训练最先进的占用预测方法,并证明在nuScenes数据集上MAE改进了25%。
Instruction
多年来,自动驾驶主要依赖于激光雷达(LiDAR),因为它具有低且与距离无关的测量误差。然而,最近的方法尝试通过图像重建三维环境,认为激光雷达稀疏、昂贵且冗余。启用基于相机的占用估计需要来自真实交通场景的地面实况几何数据,在这方面,激光雷达仍然是最可靠的信息来源,因为其测量误差低。目前用于生成激光雷达数据占用地图的技术产生的结果质量低。我们提出了一种新方法,建模传感器特性并使用证据理论来估计体素是自由、占用还是不确定的置信度。这一框架使我们能够明确分配由于测量、标注或姿态估计引起的缺失测量、遮挡或冲突。
从图像预测占用情况的方法不仅需要地面实况占用数据,还需要相机可见性掩码。当前的掩码显著低估了可见性,这阻碍了场景关键区域的有效监督,导致物体边界高估和地面估计错误。为了解决这个问题,我们提出了一种新的损失加权方法,利用估计的不确定性进行监督。使用我们的数据和损失加权,我们表明最先进的方法相比原始激光雷达测量可以显著提高预测精度。
Method
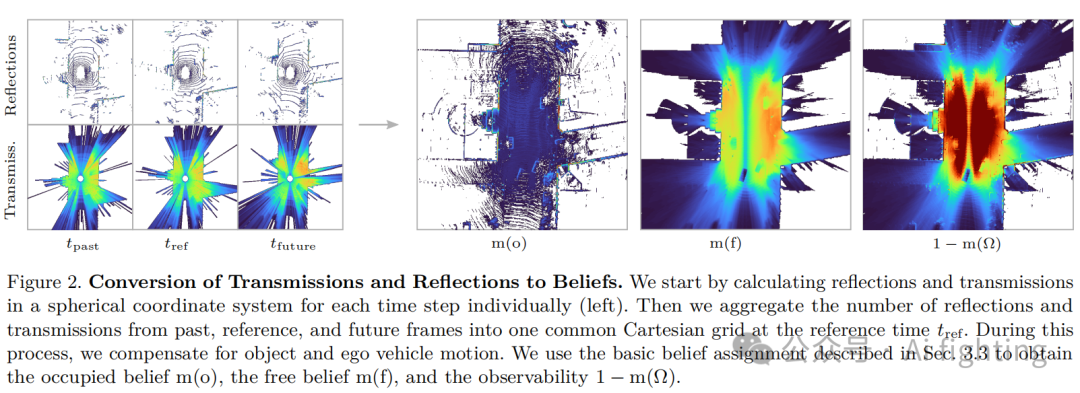
我们的方法首先通过为每个体素叠加反射和传输来将激光雷达测量数据映射到球形体素网格。下一步,我们将不同时间步的球形体素网格扭曲到当前时间步的公共笛卡尔体素网格中,并聚合反射和传输的数量。最后,我们将证据分配给每个体素,判断其是被占用、自由或不确定。以下是每一步的详细描述。
3.1 球形传感器映射
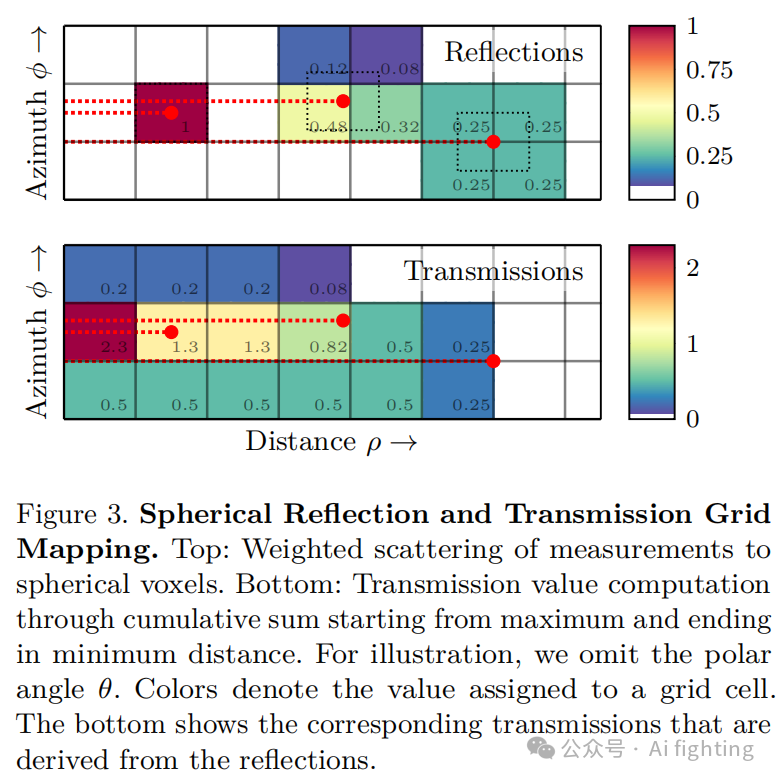
我们首先将每一帧的激光雷达测量数据映射到两个球形网格图中,分别表示反射和传输。反射网格图中的每个体素编码了从该体素发出的反射数量,通常高于捕获对象表面的体素。而传输网格图中的每个体素编码了从激光雷达起点到其反射位置自由通过该体素的激光雷达射线数量,通常高于代表自由空间的体素。
3.2 多帧聚合
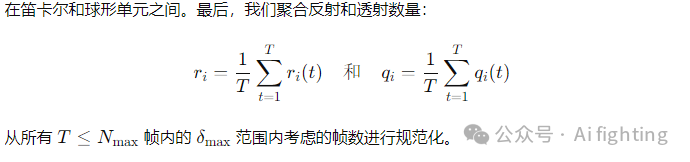
在此步骤中,我们将多个时间步的反射和传输聚合到单个笛卡尔体素网格中,并使用已知的每个对象的运动信息将过去和未来的帧扭曲到参考帧中。这里,我们考虑所有视点位移小于参考帧时的最大视点位移的帧,最多限制为 帧,在时间上均匀采样。


3.2 证据映射
每个体素在最终的网格地图中不仅需要表示占用和空闲空间的信息,还要表示不确定性。为了确定这些信息,我们使用了ET框架(也称为Dempster-Shafer理论),它可以被解释为贝叶斯理论的推广。ET理论允许将来自不同信息源的证据不仅分配给单一假设,而是分配给所有可能的组合。
Experiment
结论
本文的贡献如下:
1.多帧3D激光雷达占用栅格映射:我们提出了一种基于证据理论的简单的多帧3D激光雷达占用栅格映射方法,捕捉由于测量误差或观察缺失引起的体素占用、自由和不确定的连续证据。
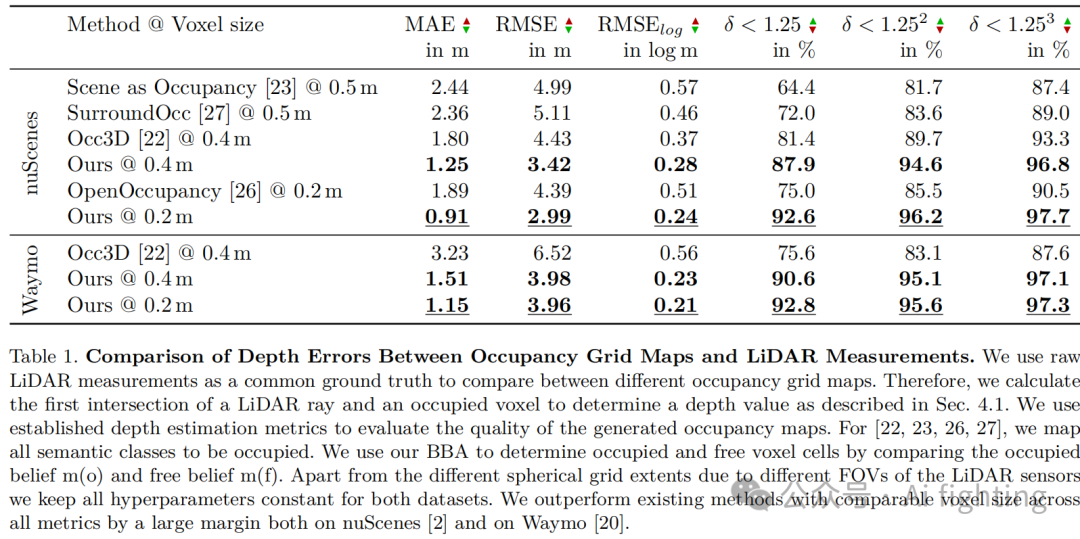
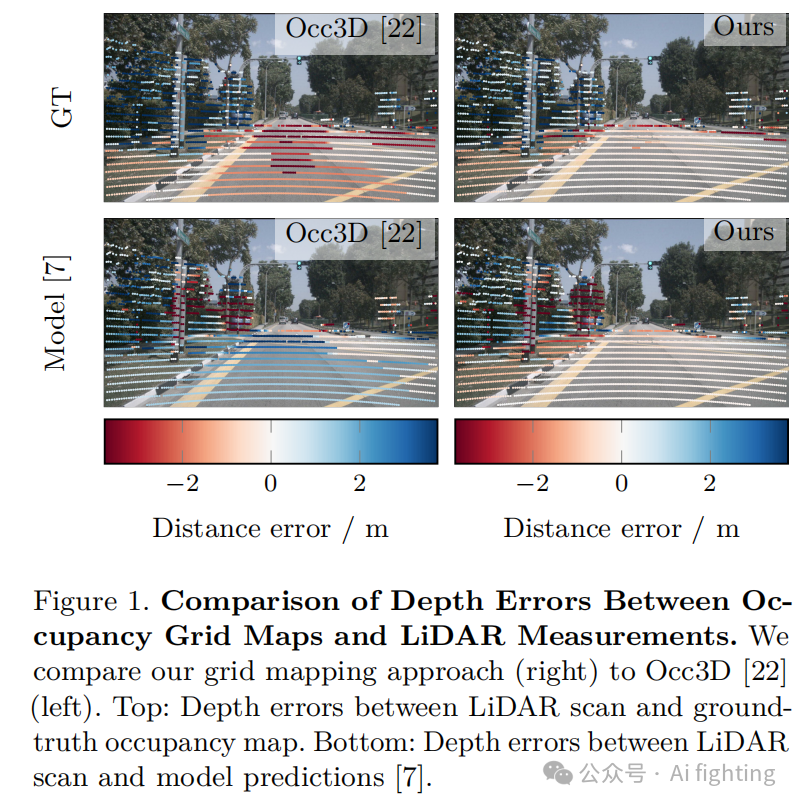
2.数据准确性的提高:我们证明了最先进的基准数据相对于激光雷达测量是不准确的。我们生成的证据占用栅格地图为二进制占用预测提供了更高质量的替代品,显示出比最先进的基准数据30-53%的均方误差(MAE)改进。
3.基于可观测性的损失加权:我们提出了一种基于可观测性的损失加权方法来训练最先进的模型,实现了占用预测与激光雷达测量之间24%的MAE降低。
引用CVPR2024文章
Accurate Training Data for Occupancy Map Prediction in Automated Driving Using Evidence Theory
关注我的公众号auto_driver_ai(Ai fighting), 第一时间获取更新内容。















 1051
1051

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









