








1 创建机器人描述功能包
cd ~/catkin_ws/src/
catkin_create_pkg SMCar_description urdf xacro
cd SMCar_description/
mkdir urdf launch config2.编写urdf并编译包
先编写smcar.urdf 与 display_smcar_urdf.launch,结构如下图

smcar.urdf 代码如下
<?xml version="1.0" ?>
<robot name="smcar">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<box size="0.5 0.3 0.2"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="-0.15 0.14 -0.1" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.08" length = "0.05"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="right_wheel_joint" type="continuous">
<origin xyz="-0.15 -0.14 -0.1" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.08" length = "0.05"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="front_left_joint" type="continuous">
<origin xyz="0.18 0.14 -0.14" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="front_left_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="front_left_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.04" />
</geometry>
<material name="white">
<color rgba="1 1 1 0.95"/>
</material>
</visual>
</link>
<joint name="front_right_joint" type="continuous">
<origin xyz="0.18 -0.14 -0.14" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="front_right_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="front_right_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.04" />
</geometry>
<material name="white">
<color rgba="1 1 1 0.95"/>
</material>
</visual>
</link>
</robot>
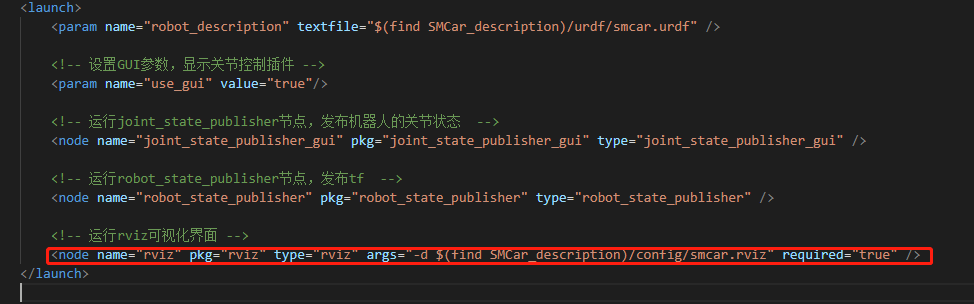
display_smcar_urdf.launch代码如下:
<launch>
<param name="robot_description" textfile="$(find SMCar_description)/urdf/smcar.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<!-- 运行rviz可视化界面 -->
<!-- <node name="rviz" pkg="rviz" type="rviz" args="-d $(find SMCar_description)/config/smcar.rviz" required="true" /> -->
</launch>
安装依赖并编译
sudo apt-get install ros-kinetic-joint-state-publisher-gui
cd ~/catkin_ws/
catkin_make
3.运行launch,保存rviz配置文件
roscore
roslaunch SMCar_description display_smcar_urdf.launch
rosrun rviz rviz点Add RobotModel
Fixed Frame选base_link


保存rviz配置文件到包的config文件夹
4.修改launch文件,重新运行
去掉注释















 5147
5147











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









