






1参考[完全经验法、等幅振荡法、衰减曲线法、响应曲线法]
1.1完全经验法
这种方法没有任何定量规律可循,凭借的是工程技术人员对控制系统与控制对象的工作机理、工作环境的熟悉,是一种粗糙的调参方法,一些定性的调参准则如下:
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低
1.2等幅振荡法
步骤:
(1)先将切除PID控制器中的积分与微分作用,取比例增益KC较小值,并投入闭环运行;
(2)将Kc由小到大变化,对应于某一Kc值作小幅度的设定值阶跃响应,直至产生等幅振荡;
(3)设等幅振荡时振荡周期为Tcr、控制器增益Kcr ,再根据控制器类型选择以下PID参数。

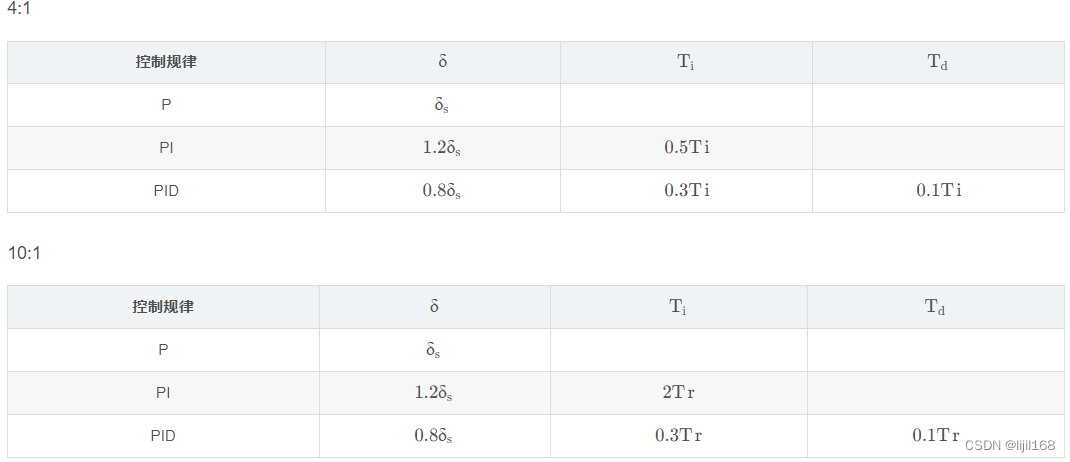
1.3衰减曲线法
(1)先把积分时间放至最大,微分时间放至零,使控制系统运行,比例度放至较大的适当值,“纯P降低比例度”,就是使控制系统按纯比例作用的方式投入运行。然后慢慢地减少比例度,观察调节器的输出及控制过程的波动情况,直到找出4:1的衰减过程为止。这一过程就是“找到衰减4:1”。
(2)对有些控制对象,用4:1的衰减比感觉振荡过强时,这时可采用10:1的衰减比。但这时要测量衰减周期是很困难的,可采取测量第一个波峰的上升时间Tr,其操作步骤同上。
(3)根据衰减比例度s和衰减周期Ts、Tr按表1进行计算,求出各参数值。
1.4响应曲线法
响应曲线法PID参数整定步骤:
(1)在手动状态下,改变控制器输出(通常采用阶跃 变化),记录被控变量的响应曲线;
(2)由开环响应曲线获得单位阶跃响应曲线,并求取 “广义对象”的近似模型与模型参数;
(3)根据控制器类型与对象模型,选择PID参数并投 入闭环运行。在运行过程中,可对增益作调整。
由于广义对象的响应曲线可以用“一阶+纯滞后”来近似,所以,如下Ziegler-Nichols参数整定方法可以使用

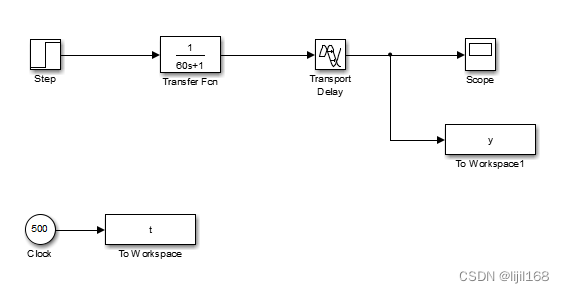
2响应曲线法PID整定示例
根据带有时滞环节的一阶近似模型的阶跃响应来整定PID,如果单位阶跃响应曲线为S形曲线,则可用此法。
假设系统 T=60,tao=80,单位阶跃响应模型为:
绘图:
close all;
figure(1);
plot(t,y,'k','linewidth',2);
xlabel('time(s)');ylabel('y');
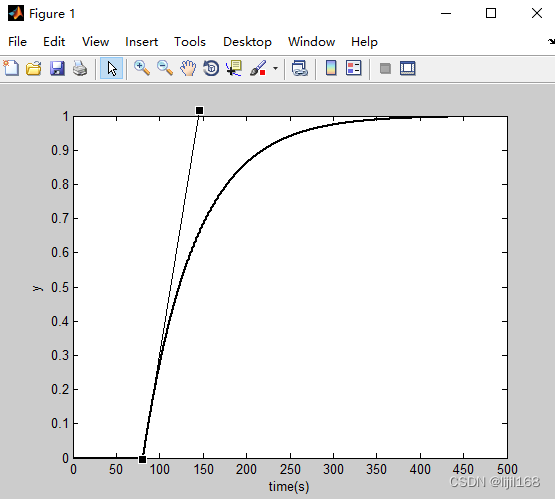
测得tao=80,T=60
计算增益K=dy/(ymax-ymin):du/(umax-umin)=1
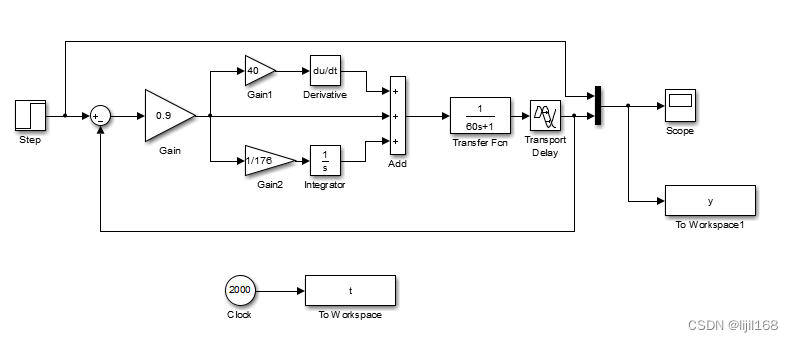
Kc=1.2 * 1/K * T/tao=1.2 * 1/1 * 60/80=0.9
Ti=2.2 * tao=2.2 * 80=176
Td=0.5 * tao=0.5 * 80=40
连续PID控制仿真:
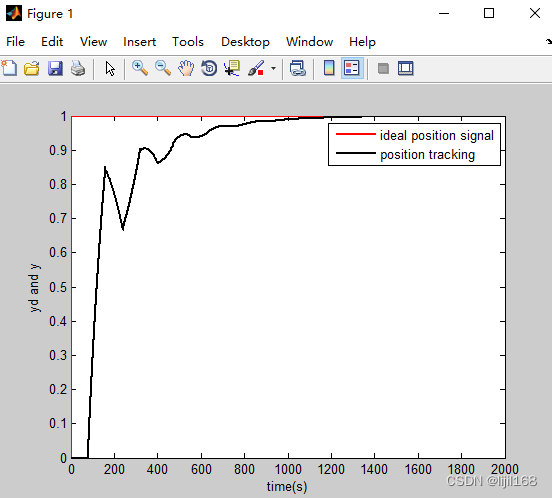
绘图:
close all;
figure(1);
plot(t,y(:,1),'r',t,y(:,2),'k','linewidth',2);
xlabel('time(s)');ylabel('yd and y');
legend('ideal position signal','position tracking');

















 1658
1658

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









