






目录
1. 衰减曲线法简介
2.衰减曲线法实现PID参数整定的步骤
3.Matlab程序实现衰减曲线法的PID参数整定
1.衰减曲线法
衰减曲线法也是工程实际中一种比较常用的PID参数整定方法,它基于闭环系统,通过观察系统过度过程响应曲线的衰减特性来确定PID控制器的参数。这种方法的基本原理是,当系统在单位阶跃输入下达到一定的衰减比时,系统的动态性能和稳态性能达到一个较好的平衡状态。
应用衰减曲线法求取PID参数的步骤:
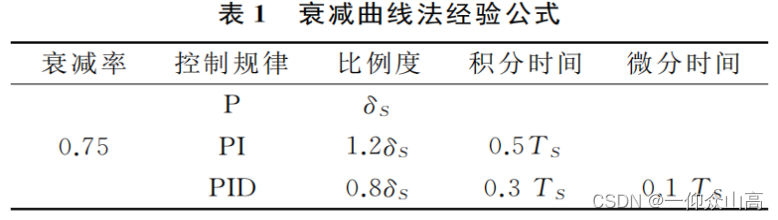
(1)确定衰减比
衰减比是指系统响应曲线达到第一个峰值后,下降到该峰值的某个百分比。根据系统的不同工况,选择一个合适的衰减率,对于一个定值控制系统通常选取衰减率为0.75或衰减比例度为4:1;对于随动系统通常选取衰减率为0.9或衰减比例度为10:1。这里是对永磁直流电动机的转速(给定的特定值)进行控制,所以选取衰减比为0.75果衰减比例度为4:1。
(2)衰减特性指标
确定衰减率后,可以通过单位阶跃响应曲线求取衰减特性指标,即衰减率和衰减周期。在这里,衰减率(R)是指系统开始震荡时最先前的相邻两个波峰,第二个波的波峰值(P2)与第一个波的波峰值(P1)之比,衰减周期(Ts)是指以上述两个波峰之间的距离(Ts=t2-t1)。注意:P1和P2指的是系统响应曲线上相邻两个同向波峰的垂直高度,这两个高度是从系统的设定点或者期望输出值开始测量的。
(3)计算PID参数
连续系统的PID控制器的传递函数可以表示为:

根据上述方程和永磁直流电动机传递函数数学模型,建立起系统的simulink仿真模型(命名为pmdcm_PID)如图1所示。
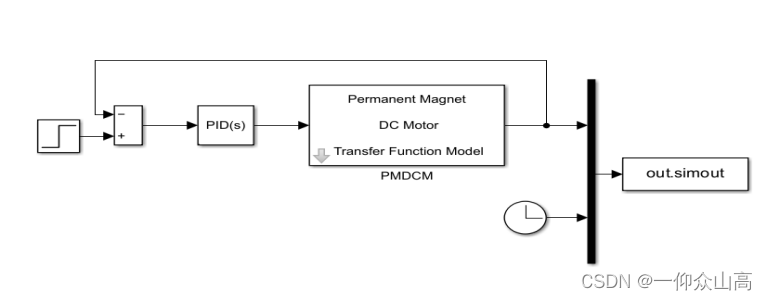
图1 用以实现衰减曲线法的仿真模型
首先对闭环反馈系统中PID控制器的参数进行设置(Ki=0,Kd=0),然后将比例增益Kp由小到大增加,每改变一次值,系统仿真运行一次,并通过示波器(Scope)观察响应曲线,直到衰减比例度4:1的曲线出现为止,记录此时波形曲线的衰减率和震荡周期。初始比例增益Kp0的设置,可以先考虑一下开环的单位阶跃响应曲线,其稳态值离设定值1相差甚远,因此要设置得比较大,设置的初值要引起较大的超调,进而引起衰减震荡。这里,设置Kp0=[100 200 300 400],用Matlab程序对Simulink模型进行仿真,得仿真结果如图2所示。观测仿真曲线,发现Kp0=400时的特性曲线最接近既定目标(衰减比例度4:1),只是略为大了一点点,当调整Kp0=377时,达到了目标,仿真结果如图3所示。
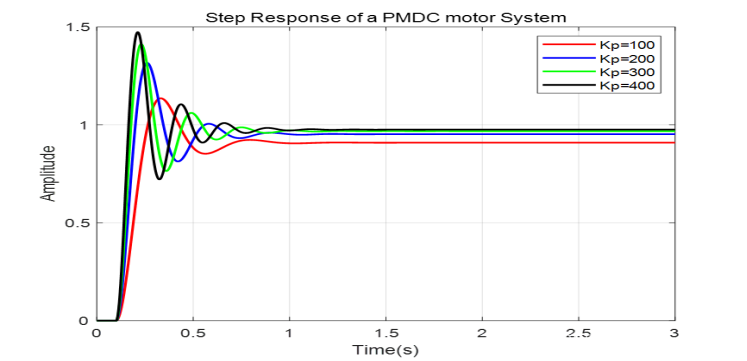
图2. ![]()
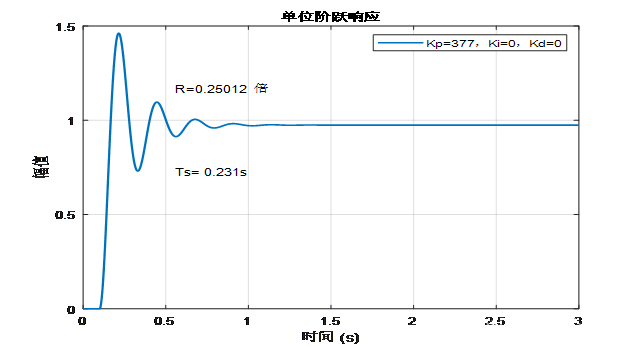
图3. 

![]()
比较图4和图3可知,图4的超调略有上升,震荡减轻,稳态误差大为减少,但超调量还是过高(为49%),与小于5%的设计要求相差很远,若要满足这一要求,PID的各个参数还要进一步调整。
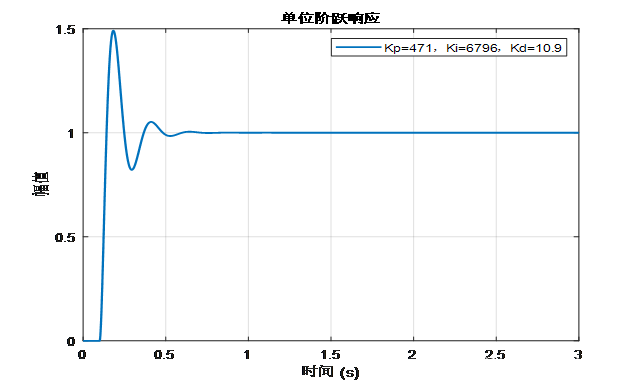
上述衰减曲线法整定PID参数,主要是在既定目标下(使闭环阶跃响应的震荡衰减比例度为某一特定值,例如4:1)应用经验公式达到整定PID参数的目的,比前面的“试凑法”要先进一些,但过程还是比较繁琐,同时,花费的时间也比较多。为解决这一问题,可以用Matlab代码和Simulink模型仿真“一站到位式”的实现衰减曲线法整定PID参数。运行以下Matlab代码,可以“一站到位”求得图4所示的仿真曲线。
clc
clear all
close all
load_system('pmdcm_PID');
Ra = 1;
La = 0.5;
J = 0.01;
Bm = 0.1;
Kt = 0.01;
Ke = 0.01;
%PID 参数初值设置
Kp =300;
Ki = 0;
Kd = 0;
R=0; %衰减曲线比率限定值
%判断最初相邻两峰值之比率是否满足1:4
while(R<0.25)
Kp=Kp+1;
simOut = sim('pmdcm_PID');
t = simOut.tout;
y = simOut.simout(:, 1);
figure(1)
plot(t,y,'lineWidth',1.5);
legend('Kp=377,Ki=0,Kd=0')
xlabel('时间 (s)');
ylabel('幅值');
title('单位阶跃响应');
grid on
[Y,T] = max(y);
SSTime= length(t);
SSOutput = y(SSTime);
[peaks, peakTime]=findpeaks(y,t);
if isempty(peaks) == 0
P1 = 100*(peaks(1)-SSOutput)/SSOutput; % 第一个波峰值
P2 = 100*(peaks(2)-SSOutput)/SSOutput; % 第二个波峰值
R = P2/P1; %计算相邻两个波峰值之比率
Ts = peakTime(2)-peakTime(1); %计算两个超调量的时间间隔值之差(Ts)
end
end
disp(['衰减率: ', num2str(R)]);
disp(['衰减周期: ', num2str(Ts), ' 秒']);
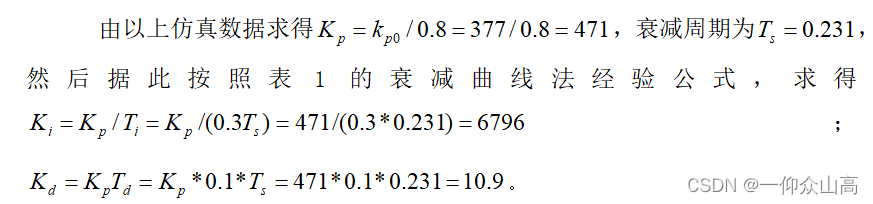
% 根据经验公式求PID参数
Kp=Kp/0.8;
Ti=0.3*Ts;
Ki=Kp/Ti;
Td=0.1*Ts;
Kd=Kp*Td;
% 绘制衰减曲线法整定PID参数
simOut = sim('pmdcm_PID');
t = simOut.tout;
y = simOut.simout(:, 1);
figure(2)
plot(t,y,'lineWidth',1.5);
xlabel('时间 (s)');
ylabel('幅值');
title('单位阶跃响应');
legend('Kp=471,Ki=6796,Kd=10.9')
grid on;总结:本文用Matlab语言全面介绍了衰减曲线法整定PID参数的过程,编写Matlab程序(代码和Simulink模型)“一站到位式”的实现了衰减曲线法整定PID参数。
参考资料:
1.谢仕宏. Matlab控制系统动态仿真实例教程. 化学工业出版社 北京 2009
2.刘文定 王东林. MATLAB/Simulink与过程控制系统. 机械工业出版社 2012















 9736
9736

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









