







 本文详细介绍了全景图生成的图像缝合过程,包括映射模型选择、特征点提取与匹配、图像Warp变换、色差调整和图像融合。重点讨论了不同映射模型的适用场景,以及OpenCV的Stitching模块在图像拼接中的应用。
本文详细介绍了全景图生成的图像缝合过程,包括映射模型选择、特征点提取与匹配、图像Warp变换、色差调整和图像融合。重点讨论了不同映射模型的适用场景,以及OpenCV的Stitching模块在图像拼接中的应用。
图像和视频缝合 在全景图生成、360°全景相机以及VR全景领域有非常多的应用,常用的图像缝合工具有Microsoft的ICE、PTGui、开源软件Hugin等,基于视频的拼接可以参考VideoStitch、StitcHD (github.com/lukeyeager/StitcHD)以及stitching_with_cuda。
图像缝合的算法步骤可以描述为:
Step1. 定义映射模型,常用的包括:球面、柱面、平面,其中球面映射应用最为广泛;
Step2. 根据输入图像,提取特征点,对特征进行匹配,得到输入图像之间的映射关系T;
Step3. 根据映射关系T进行图像的Warp变换,对齐图像;
Step4. 包括利用颜色调整来消除图像间的色差,和采用图像融合来消除拼缝。
算法流程图描述为:
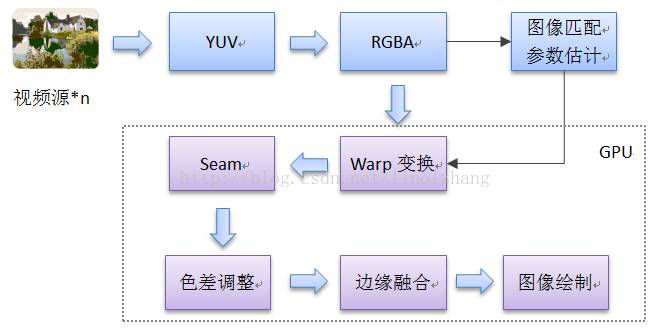
我们对算法每一步进行展开,并在此基础上进行讨论。
• 映射模型
映射模型可以看作是用于图像映射的载体,相当于二维图像映射到三维空间的一种变换,如下图所示:
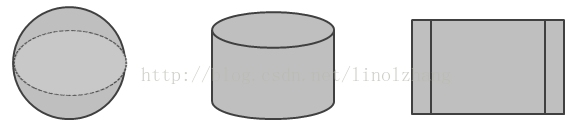
其对应缝合效果如下图所示:

选择合适的映射模型非常重要,需要与你的图像采集场景以及应用方式相匹配,一般对于水平拼接,采用柱面映射描
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









