








 超级会员免费看
超级会员免费看

0.实现效果
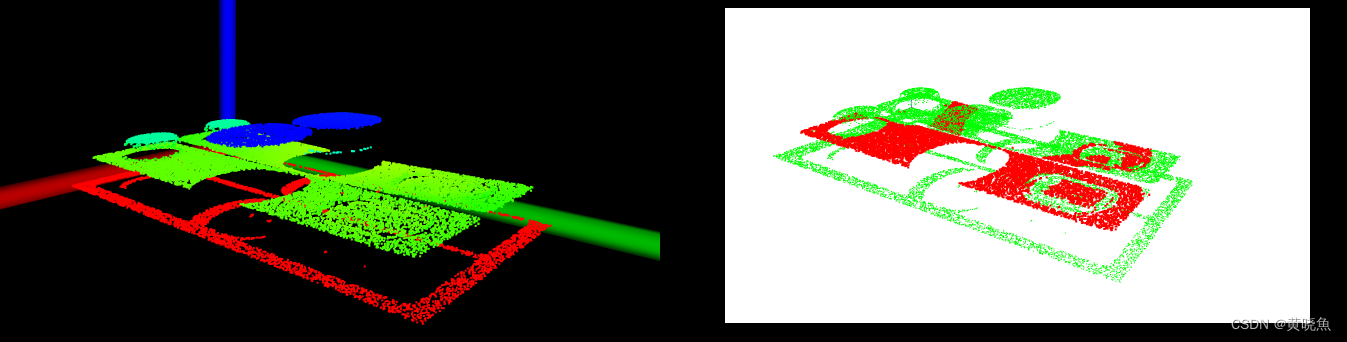
左图为原始点云,右图中的红色点为拟合平面所选取的点,绿色的点为拟合平面所抛弃的点
拟合出的结果是一个平面方程。
1.算法原理
RANSAC(Random Sample Consensus,随机样本一致性)算法在拟合平面时的工作原理可以概括为以下几个步骤:
- 随机选择最小样本集:
- RANSAC算法首先会从数据集中随机选择三个点作为最小样本集。在三维空间中,三个非共线的点可以确定一个平面。
- 构建模型:
- 使用这三个随机选择的点来构建一个平面模型。这个模型就是这三个点所在的平面。
- 计算误差:
- 接着,RANSAC会计算数据集中其他所有点到这个拟合平面的距离,这个距离通常被称为每个点的误差。
- 确定内点:
- RANSAC算法会设定一个预设的阈值来判断每个点是否为内点。如果一个点到拟合平面的距离(即误差)小于这个阈值,那么这个点就被认为是符合平面模型的,并将其标记为内点(inliers)。否则,它就被认为是外点(outliers)。
- 更新模型:
- 如果当前

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 4494
4494











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











