






4D毫米波雷达原理和系统方案

附赠自动驾驶学习资料和量产经验:链接
4D毫米波雷达的性能比一般的“3D”雷达要高,体现在距离远,精度高,角分辨率高等方面。
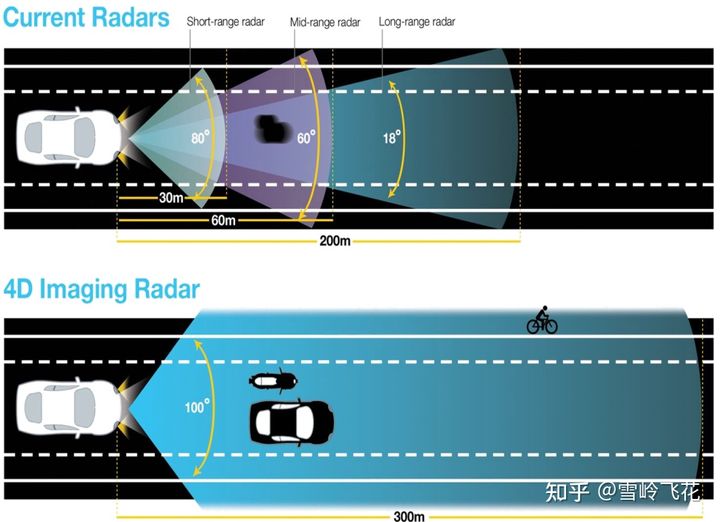
那么4D成像毫米波雷达是如何做到的呢?
本篇文章从雷达指标方程上进行简要的解释,以及介绍一下主流的4D毫米波雷达系统方案。
1. 雷达关键指标方程
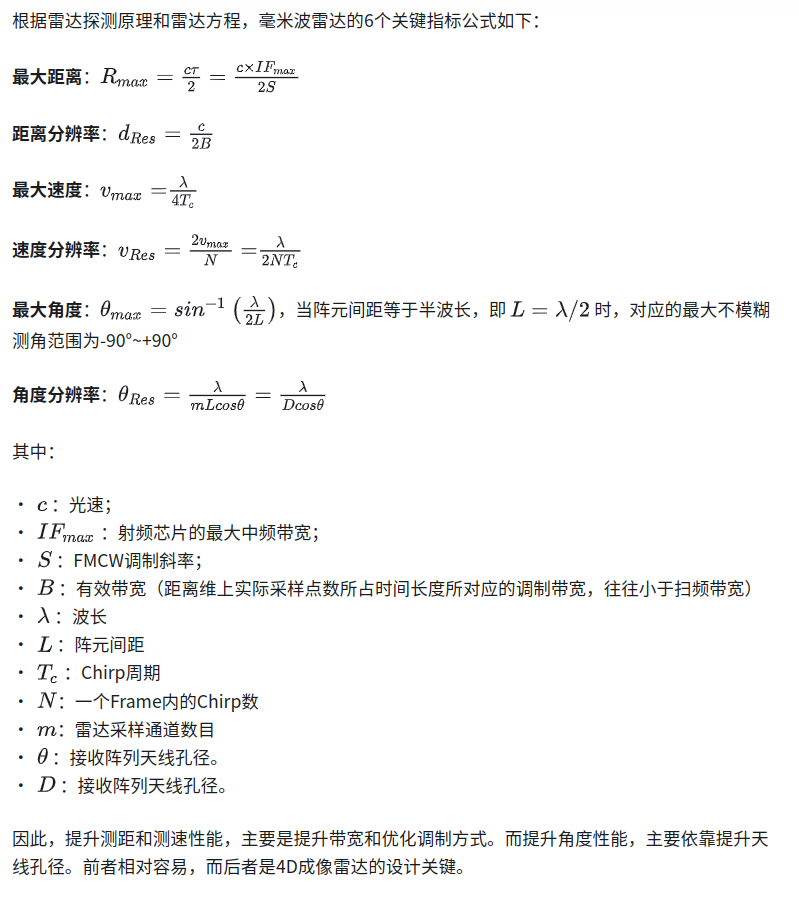
2. 为什么必须要增大天线孔径
如果让雷达波束尽可能窄,配合扫描机构实现一定范围内的扫描,就可以实现高的角分辨率。
没错,这就是目前自动驾驶领域的当红炸子鸡——Lidar(当然更严谨来说,是ToF扫描激光雷达,不是Flash或者FMCW激光雷达):
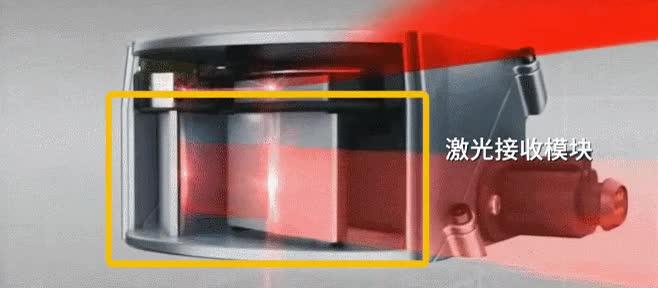
00:06
然而,这对于毫米波雷达是极为困难的。
原因是,毫米波点源天线的辐射是趋近于球面波的,必须要通过对天线进行设计,才能缩小其波瓣宽度,同时增加天线增益,提升辐射距离。
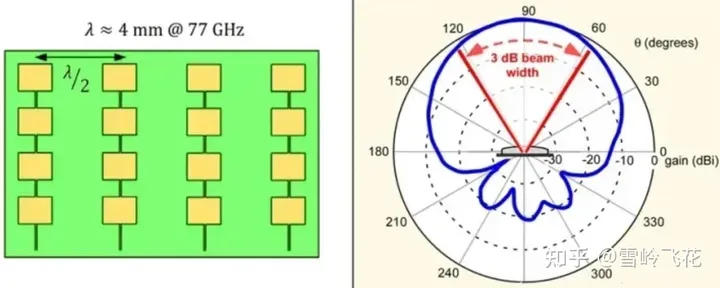
雷达波束宽度的计算公式是:

其中,θ为波束宽度,λ为天线工作波长,D为天线口径,α为天线指向误差角度(主要受天线设计和加工精度影响)。因此,波束宽度主要和雷达孔径D有关,孔径越大,雷达波束越窄,指向性越强。
一种方案是增大天线物理尺寸,雷达尺寸越大,孔径越大,例如“大锅盖”机械扫描雷达:

汽车显然不可能顶着一个“大锅盖”行驶。
当然,也不是说绝对不行,比如1970年代顶着大锅盖雷达的实验汽车。这种车如果放在现在,回头率应该老高了。。。。(1970年回头率也高。。)

所以,车用雷达的体积需要尽量小。
目前最新的雷达天线都是印刷在电路板上的微带天线,不过这种雷达3dB波束宽度基本都在30-60°之间。
那么如何在这么大的波束宽度情况下,来实现精确测角呢?
这就是MIMO技术。
3. 通过MIMO提升角分辨率
根据角分辨率公式:
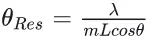
其中:
-
波长λ越小,角度分辨率越高。目前77/79GHz雷达取代24GHz雷达就有部分这个原因。
-
采样的通道个数m越多,分辨率越高。
-
接收天线阵元之间的距离L越大,分辨率越高。
-
θ越小时(例如天线正前方),其分辨率越高,θ越大时(例如FOV边缘),分辨率越低。
由于λ和θ一般不会调整,因此,提升角分辨率主要依靠增大m和L,即雷达孔径。
由于增加L会使得视场角FOV的减小,如前所示,最大检测角度为:

因此,增大孔径更多的是依靠增加通道个数m,这就是MIMO(多输入多输出,Multi-input Multi output)。
MIMO的核心思想是采用不同位置的收发单元进行多次测量,通过接收信号的差异解算角度。MIMO雷达拥有多个发射天线(例如a个)和多个接收天线(例如b个),即生成一个 m = a × b的虚拟天线阵列,可以实现较大的虚拟孔径。
a个天线发射相互正交的信号,多波形信号在空间保持独立。b个接收天线采用a个匹配滤波器对回波进行匹配,从而可以得到m = a × b个通道的回波数据。
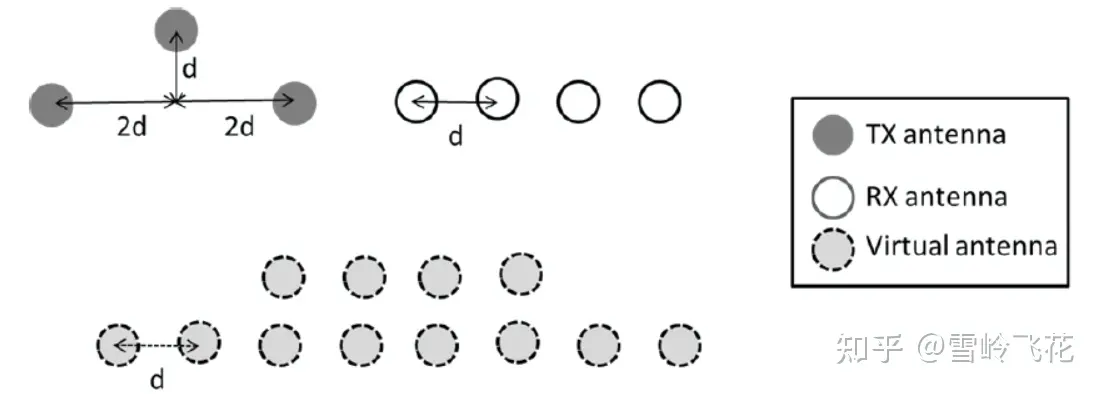
MIMO雷达通过采用稀疏布阵,实现较大的虚拟孔径,从而大幅提升角分辨率。
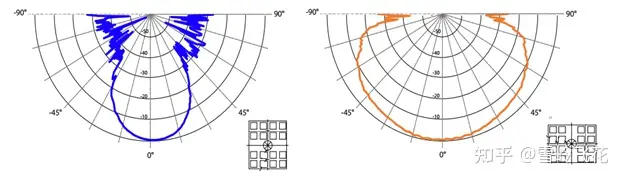
如下是TI测试的多片级联雷达(MIMO)的FFT输出图,可以看到,通道数越多,峰值越尖,精细程度就越高,角分辨率越高。
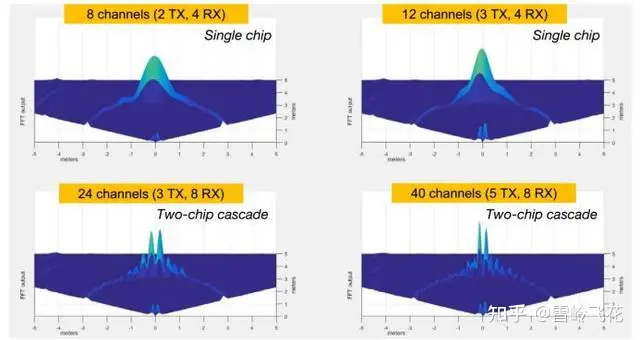
图片来源:TI
4. 4D毫米波雷达设计方案
市面上有很多采用MIMO技术的4D成像毫米波雷达,通道数从12个到最高的2304个,如下图所示。
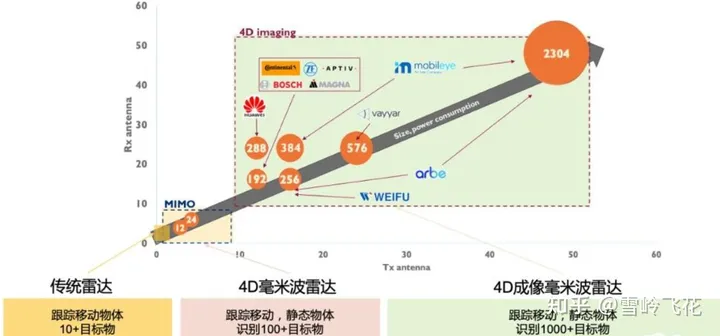
其中,实现方案主要有2种:
(使用超导材料的方案也经常被认为是第3种方案,不过该方案量产可行性还很低,暂不作为主流方案分析)
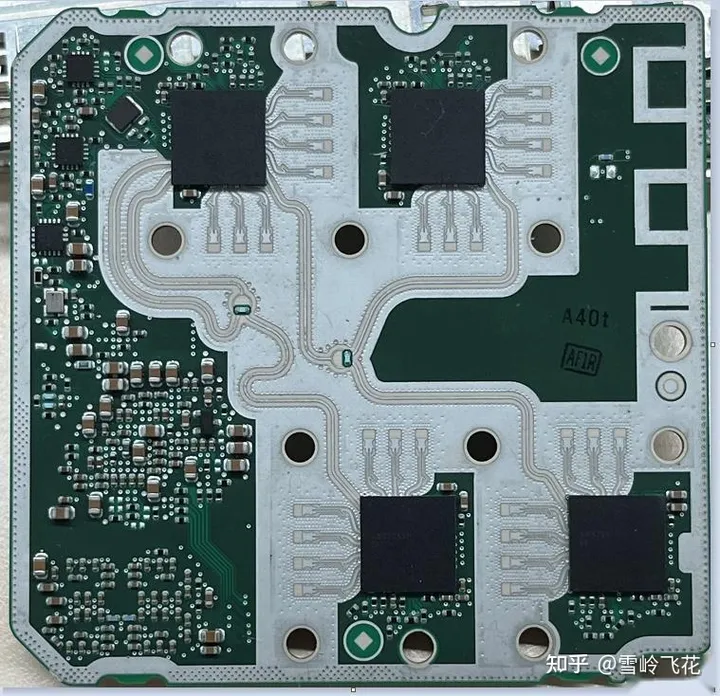
方案1:多MMIC级联
使用多片MMIC级联,例如2级联、4级联或者8级联等,通过特殊的软件算法和天线设计,实现高倍数的虚拟MIMO,通过增大的虚拟孔径,大幅提升角分辨率。
使用该方案的企业很多,包括大陆、博世、采埃孚、华为、森思泰克等。例如大陆ARS548雷达:
该方案的优势是:
-
技术成熟度高,产品稳定性好;
-
前期开发难度低,上市周期短;
该方案的劣势是:
-
成本较高,功耗较高,尺寸大;
-
由于级联络线不可持续,无法通过更多芯片堆叠的方式,继续提升产品性能;
方案2:专用芯片组
研发新的芯片组,将多发多收MMIC和处理器集成在一套专用的芯片组中。
采用该方案的代表企业:Arbe、Uhnder、Vayyar、Mobileye等。例如Arbe的产品:

该方案的优势是:
-
集成度高,尺寸小;
-
可以实现更加灵活的调制方式和架构,能够实现更大的雷达孔径,性能更高;
该方案的劣势是:
-
芯片集成度高,通道串扰、散热等挑战更大;
-
技术成熟度低,芯片开发周期长,迭代节奏慢;

5. 结论
4D毫米波雷达主要通过增加发射&接收通道的个数,增加雷达虚拟口径,来提升毫米波雷达的角度分辨率。
由于成熟度的原因,当前量产的4D成像毫米波雷达主要以多MMIC级联的架构为主。**由于专用芯片方案降本潜力更大、性能更高、体积更小,**业内普遍认为集成化、芯片化会成为毫米波雷达发展的未来趋势,专用芯片方案将会是未来4D成像毫米波雷达的主流方案。














 4280
4280











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









