







 该文展示了九架无人机从正方形编队转换至三角形编队,并在三维空间中执行转弯、直线飞行和爬升任务的仿真。同时,实现了21架无人机的编队形成、重构、保持和避撞功能。代码基于MATLAB,2016版本运行良好,但在2020版本中存在一些问题。
该文展示了九架无人机从正方形编队转换至三角形编队,并在三维空间中执行转弯、直线飞行和爬升任务的仿真。同时,实现了21架无人机的编队形成、重构、保持和避撞功能。代码基于MATLAB,2016版本运行良好,但在2020版本中存在一些问题。
一、背景
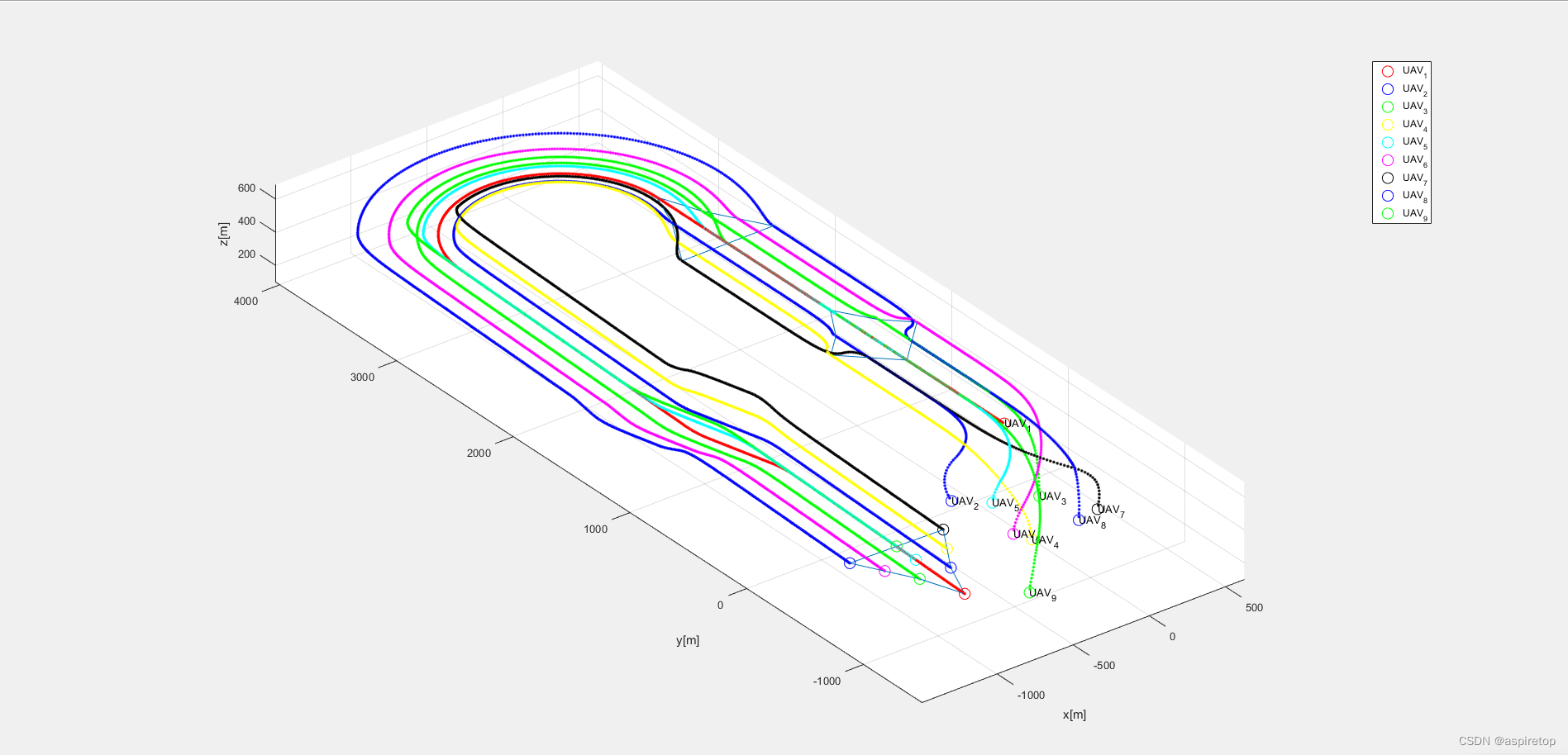
九架无人机由不同初始位置,集结为正方形编队,之后沿直线变换为三角形编队,保持三角形编队转弯、直线飞行、爬升的仿真过程
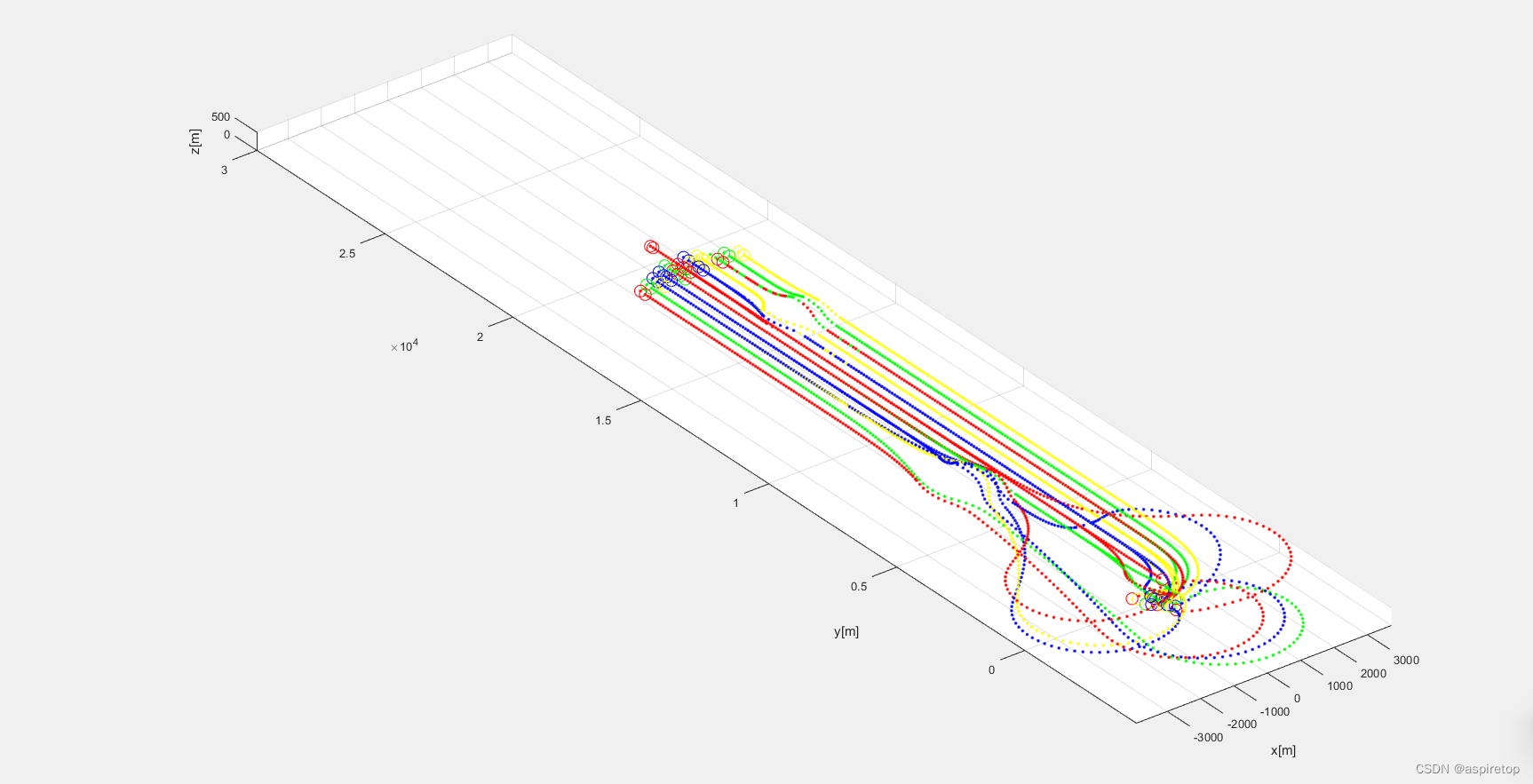
实现了21架无人机的编队形成、编队重构、编队保持以及避撞
二、代码
matlab2016运行正常,matlab2020运行有问题
九架无人机由不同初始位置,集结为正方形编队,之后沿直线变换为三角形编队,保持三角形编队转弯、直线飞行、爬升的仿真过程
实现了21架无人机的编队形成、编队重构、编队保持以及避撞
matlab2016运行正常,matlab2020运行有问题
 1万+
4496
3336
1641
2029
1万+
4496
3336
1641
2029

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























