







1 引言
众所周知,随着现代电子技术的发展,内外业一体化的水深测量系统已普遍应用。在该系统中,导航定位系统和测深系统存在着采集数据时间不同步的问题,即导航延时。导航延时对水深测量精度的影响一直是值得关注的问题,导航延时的存在,将使水深点的位置发生偏移,尤其在硬底质区域(如:珊瑚礁)且坡度较陡(如:4:1)的边坡进行测量时,其影响更为明显。通常情况下,采取校准试验的方法来求取导航延时值,以消弱其对水深点位置的影响,但由于校准场地地形复杂、校准方法不易操作等诸多因素的影响,常常不能完全消除其影响。下面介绍一种以LRK DGPS定位系统和多波束测深系统为基础,在计算机软件平台上,利用秒脉冲PPS(Pulse-Per-Second)把导航系统和测深系统进行时间同步的方法。采用该方法可完全消除导航延时对水深定位的影响,从而提高水深测量定位精度,使水深测量更好地为疏浚施工服务。
2 导航延时测定误差对水深点位置的影响
导航延时反映的是LRK-DGPS定位与多波束系统测深的不同步。为将LRK-DGPS三维解归位到多波束系统的换能器位置,为测深提供瞬时平面和垂直基准,并最终实现波束在水下的归位计算,就必须消除导航延时的影响。由于校准场地地形复杂、校准方法不易操作等诸多因素的影响,常常不能完全消除其影响,下面来分析导航延时测定误差对水深值位置的影响。
2.1 导航延时对水深值位置影响原理见图1。
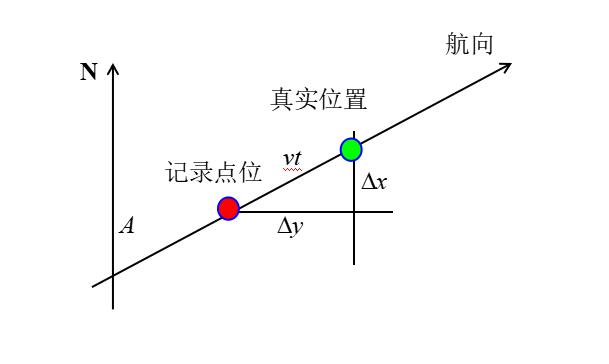
图1 导航延时影响原理图
设导航延时量为t,船速为v,航向为A,则导航延时引起的位移量Dx,Dy如(1)、(2)式所示:
 (1)
(1)
 (2)
(2)
(1)、(2)式中:
Dx ---- 导航延时在纵坐标X方向的影响量
Dy ---- 导航延时在横坐标Y方向的影响量
v ---- 测量船的速度
t ---- 导航延时量
A ---- 测量船航向
考虑到电罗经观测误差和测量船速度误差影响较小,下面只顾及导航延时t。对(1)、(2)式微分,推导出导航延时dt对水深点位置的影响(dx,dy):

(3)

(4)
由此得到导航延时误差dt引起的水深值位置误差:
(5)
(6)
(7)
(5)、(6)、(7)式中:
s TD-x, ---- 导航延时dt在纵坐标X方向的影响量
sTD-y ---- 导航延时dt在横坐标Y方向的影响量
sTD-p ---- 导航延时dt引起的水深值平面位移量
2.2 举例说明导航延时误差对水深值位置的影响
若船速为8节(约4.111米/秒),导航延时确定误差为0.05秒,则导航延时确定误差dt引起的水深点位置误差如表1所示:
表1 导航延时确定误差dt引起的水深值位置误差表
单位:米
| 航向A | 纵坐标误差 sTD-x | 横坐标误差 sTD-y | 平面位置误差sTD-p | 备 注 |
| 0° | 0.2056 | 0 | 0.2056 | |
| 15° | 0.1986 | 0.0532 | 0.2056 | |
| 30° | 0.1780 | 0.1028 | 0.2056 | |
| 45° | 0.1453 | 0.1453 | 0.2056 | |
| 60° | 0.1028 | 0.1780 | 0.2056 | |
| 75° | 0.0532 | 0.1986 | 0.2056 | |
| 90° | 0.0000 | 0.2056 | 0.2056 | |
| 105° | -0.0532 | 0.1986 | 0.2056 | |
| 120° | -0.1028 | 0.1780 | 0.2056 | |
| 135° | -0.1453 | 0.1453 | 0.2056 | |
| 150° | -0.1780 | 0.1028 | 0.2056 | |
| 165° | -0.1986 | 0.0532 | 0.2056 | |
| 180° | -0.2056 | 0.0000 | 0.2056 |
统计结果表明:
导航延时误差引起的水深点最大平面位置偏差sTD-p为±0.205米,方位的改变不影响这一估算结果。
由式(1)、(2)还可以看出,测量船的速度对导航延时引起的水深点位置误差有直接影响,随着船速的增加,其影响量也逐步增大。因此,测量时适当控制船速,可有效降低导航延时对水深点定位的影响。
通过以上分析,当船速8节,导航延时确定误差为0.05秒时,引起的水深平面误差为±0.205米。若由于校准方法不合理等原因引起导航延时确定误差增大时,其引起的定位误差将进一步增大。因此,采用PPS来消除导航延时的影响是必要的。
3 硬件设备的选择
要应用秒脉冲PPS,必须选择合适的导航设备和测深设备,还应根据计算机软件平台的不同,制做适用的数据传输连接电缆。
3.1 导航设备的选择
导航设备除有正常水深测量定位所需的功能外,还必须具有秒脉冲(PPS)输出和时间信息$GPZDA输出的功能。一般情况下,秒脉冲(PPS)单独从一个端口输出,该端口可以为常用的D9型端口模式,也可以为专用的同轴电缆BNC接口连接模式。时间信息$GPZDA格式数据从一独立串口输出,也可与定位信息$GPGGA从同一串口输出。图2、图3为两种带PPS输出的GPS定位设备的样例。
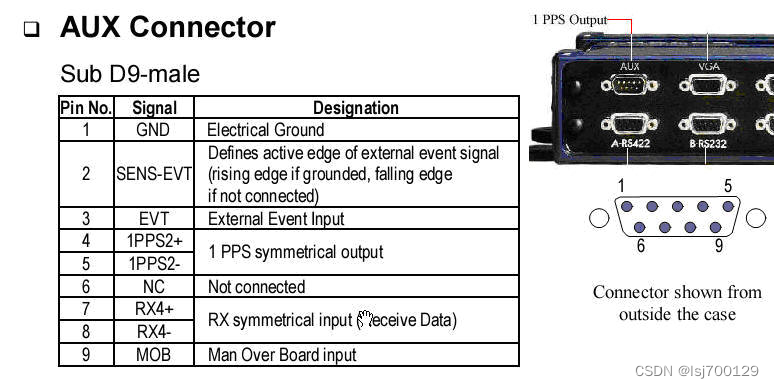
图2 D9型端口连接方式的PPS接线图
上图中,秒脉冲(PPS)从一D9形式的端口----AUX输出,4号针脚输出1PPS信号,1号针脚接地。
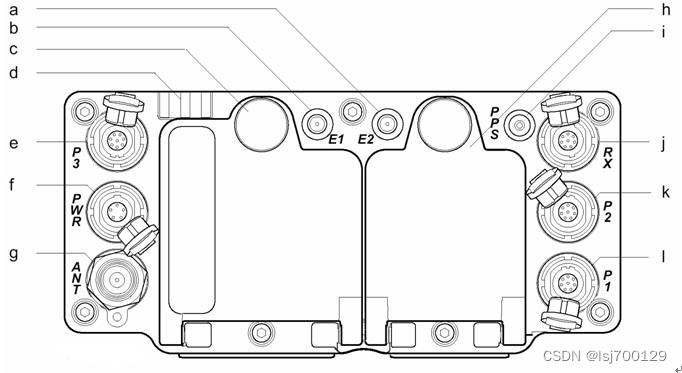
图3 PPS输出采用同轴电缆BNC接口的GPS接口面板
上图为一采用同轴电缆BNC接口输出秒脉冲(PPS)的GPS接口面板图,i端口为PPS输出端口。
3.2 测深系统的选择
测深设备可以选择单波束测深系统或者多波束测深系统,但该设备必须带有时间同步器,否则将不能进行时间同步,图4为带有时间同步器的多波束测深设备的接口面板。

图4 带有时间同步器的多波束测深设备的接口面板
上图为一带有时间同步器的多波束测深设备的接口面板,其中RS-232接口1用于输出多波束测深数据,同时还可以接收外部设备所给的同步时间信息。该设备也可以采用网络接口IOBASE1输出测深数据,由于网络传输的数据包中不带时间标签,所以采用网络传输测深数据时必须使用PPS同步设备。
3.3 秒脉冲(PPS)信号连接电缆的制做
当导航系统和测深系统均具备PPS时间同步的功能后,还必须制做专用的连接电缆来传输PPS和时间信息。由于采用的硬件设备不同或者所用的数据采集软件不同,其接线方式也不尽相同,设备厂家一般不提供PPS连接用的电缆。下面就笔者所采用的导航系统、测深系统和计算机软件平台来说明该组电缆的接线方式。
(1)PPS信号电缆接线方式见图5。
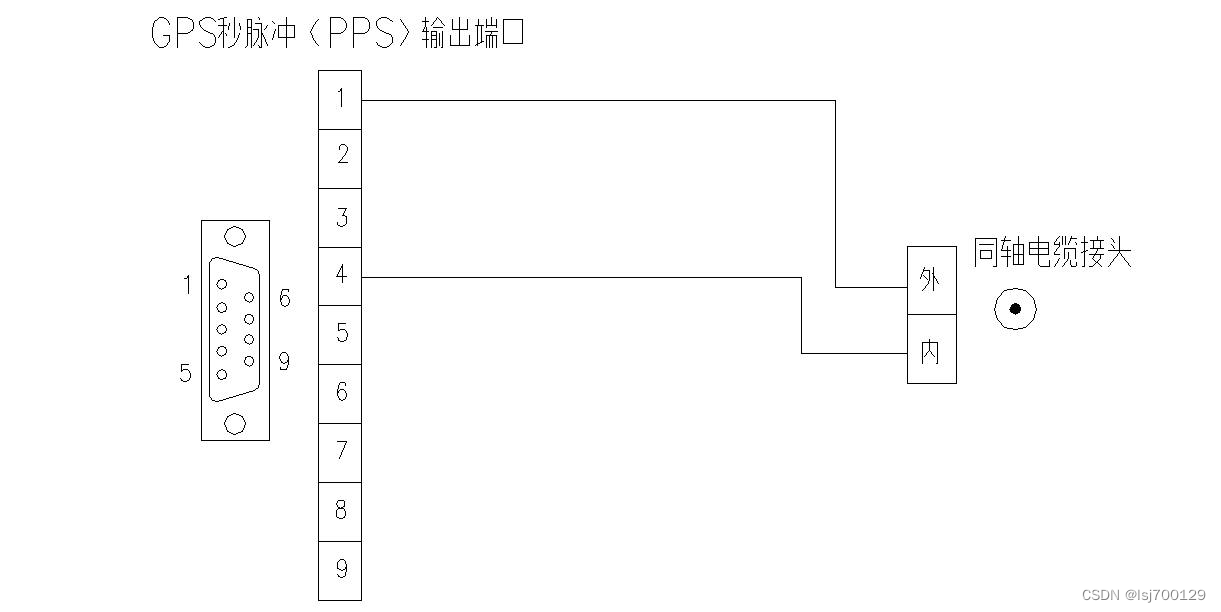
图5 PPS信号电缆接线方式图
左端第4针脚输出1PPS信号,通过同轴电缆连接BNC接头的内芯;第1针脚接地,连接BNC接头的外芯。该电缆左端连接GPS的AUX端口,右端连接PPS控制转接头的BNC端口。
(2)多波束主机与采集计算机间连接电缆接线方式见图6:
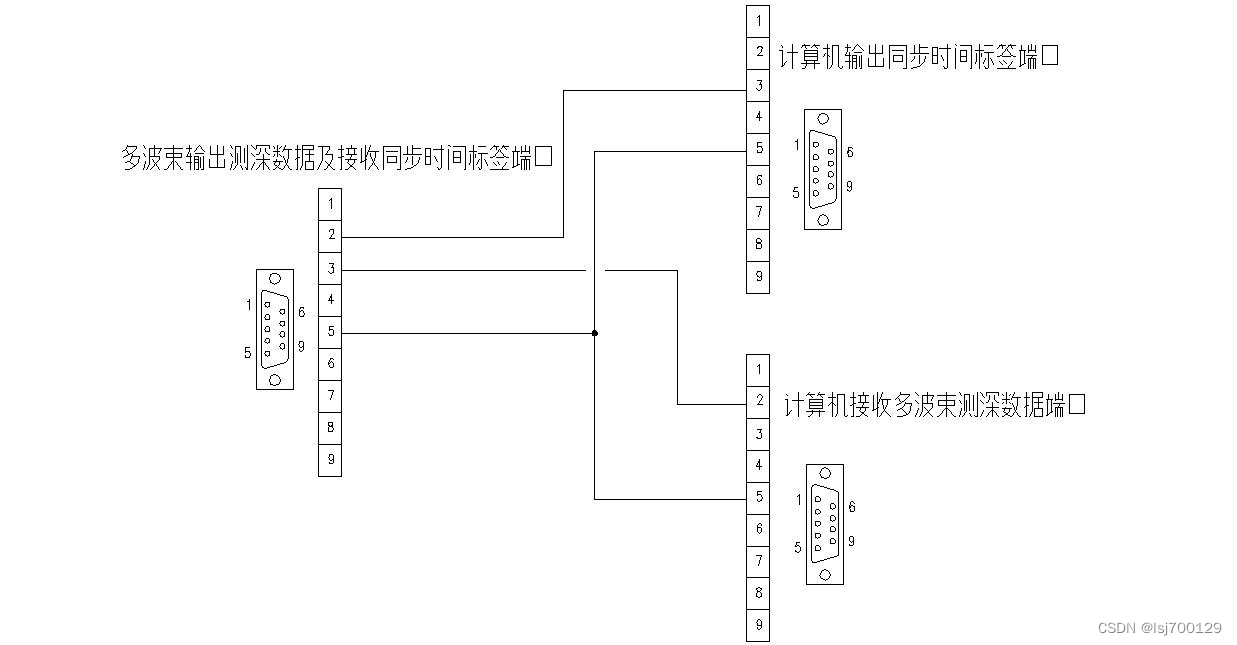
图6 多波束主机与采集计算机间连接电缆接线方式图
上图中,左端端口连接多波束主机的RS-232串口1,用于输出测深数据和接收同步时间标签信息,右端上部端口连接采集计算机输出同步时间标签的RS-232串口,右端下部端口连接采集计算机接收多波束测深数据的RS-232串口。
若多波束系统采用网络端口输出测深数据,则其主机与采集计算机间的接线方式见图7:
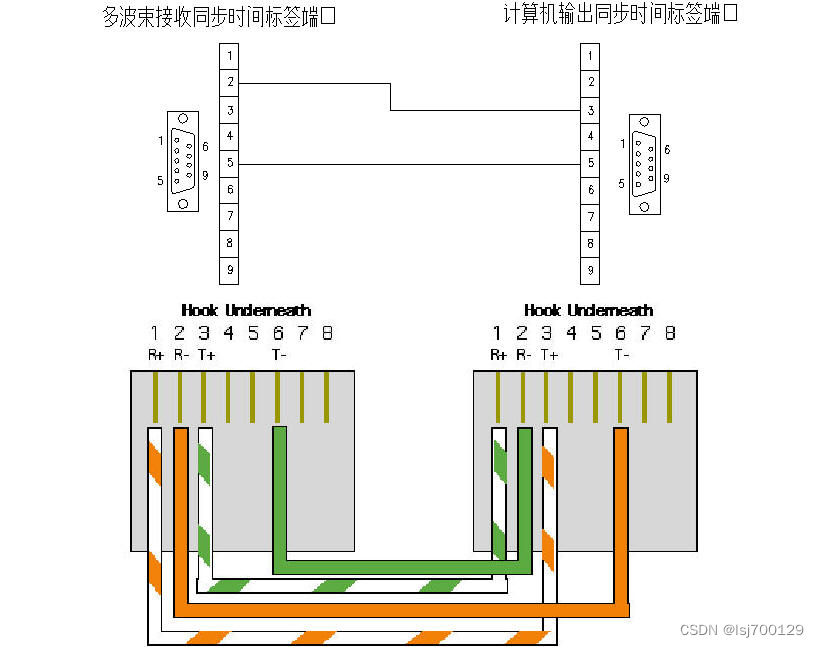
图7 采用网络方式传输测深数据时的接线图
上半部分为多波束主机与采集计算机间用于传输同步时间信息的RS-232串口线接线图,下半部分为多波束主机与采集计算机间用于传输测深数据的交叉网线接线图。
(3)GPS向采集计算机传输同步时间(ZDA)电缆接线方式见图8:

图8 GPS向采集计算机传输同步时间(ZDA)电缆接线图
上图中,左端连接GPS的输出ZDA时间信息的端口,右端连接计算机接收时间信息的端口。ZDA时间信息也可以与定位信息GGA从同一端口输出,此时与计算机连接端再并联出一端口,连接至采集计算机上接收定位信息的端口即可。
另外,在该软件平台上使用PPS还需配备专用PPS控制转接头(见图9),该设备与采集软件配套使用,来控制PPS。
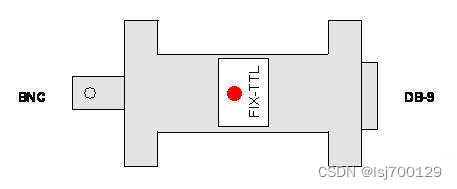
图9 PPS 控制转接头
BNC端口通过以上介绍PPS信号电缆连接至GPS输出秒脉冲的AUX端口。为减小信号延时,DB-9端口应连接至采集计算机主板自带的RS-232串口上,PPS正常工作时,图中所示红灯会随秒脉冲信号闪烁。
4 应用实例
下面以天津港航道疏浚工程施工测量为例来说明秒脉冲(PPS)的应用情况。该项目所用测量设备为多波束测深系统和LRK-DGPS定位设备,该多波束测深系统具有时间同步器,LRK-DGPS定位设备可输出1PPS秒脉冲信号和ZDA时间信息,满足应用PPS消除导航延时的条件。
4.1 配置文件设置
所用硬件设备按照应用PPS的要求安装完毕后,在采集计算机中建立项目配置文件。除常规测量所需要的配置外,在配置文件要增加辅助系统,如图10所示:

图10 配置文件中辅助系统
在辅助系统中增加PPS驱动程序和同步时间输出驱动程序,PPS驱动详细设置见图11:
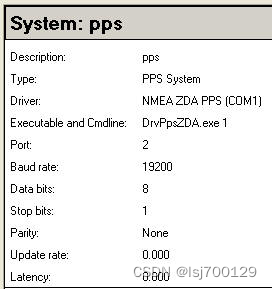
图11 PPS驱动详细设置参数
上图中,当选择PPS驱动为“NMEA ZDA PPS(COM1)”时,PPS控制转接头应连接在计算机主板上的COM1串口上,下面的连接端口及通讯参数为接收ZDA时间信息的配置参数。
同步时间输出驱动的详细配置参数如图12所示:
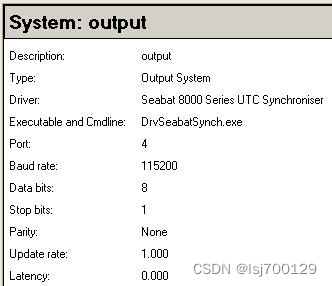
图12 同步时间输出驱动详细配置参数
该驱动程序正常工作后,每秒一次向多波束主机输出时间信息,此时,在多波束系统操作界面上即显示同步时间信息。
4.2 多波束测深系统校准
在完成硬件安装和配置文件后,启动在线控制程序,PPS系统即可正常工作,见图13:
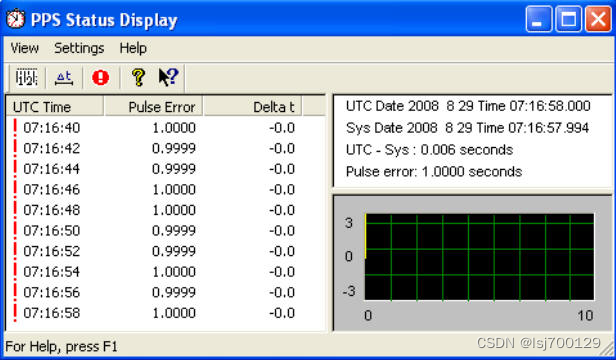
图13 PPS系统正常工作界面
各系统工作正常后,即可进行多波束测深系统的校准,由于使用PPS系统消除了导航延时的影响,所以在校准时只求取Roll、Pitch、Yaw三个校准参数即可。
4.3 效果检查
为检查PPS系统消除导航延时影响的效果,选取校准时两条对向测量线的数据(航道边坡区域)。为了减小Roll、Pitch、Yaw对测量结果的影响,我们选取中央波束附近的测量数据绘制了断面图,如图14所示:
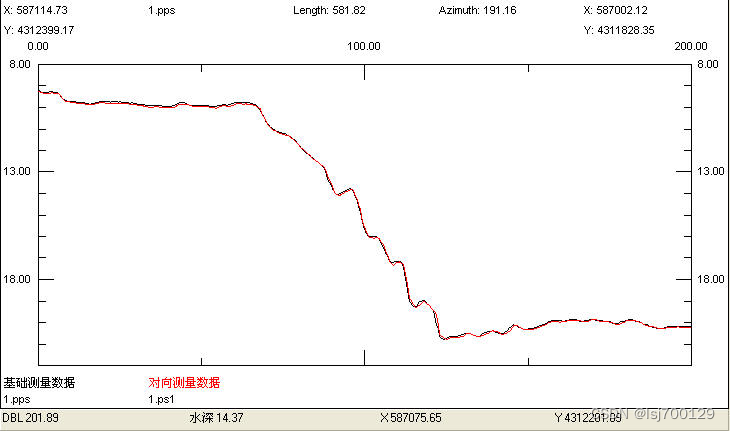
图14 对向测量断面图
上图中,黑色断面线为从北向南垂直航道边坡所测,红色断面线为从南向北所测,上述测量数据只进行了实时滤波和水位改正。我们知道,对向测量时,延时误差对断面位置影响会扩大一倍,上图中两条断面线几乎完全重合在一起,说明应用PPS来消除导航延时的影响是可靠的。
5 结束语
应用秒脉冲(PPS)时间同步技术可以完全消除导航延时对成果水深位置的影响,大大提高疏浚工程水深图的成图精度,尤其是开挖坡度较陡的基槽等疏浚施工项目,对控制超宽,减少废方具有十分积极的意义。















 8999
8999

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









