







1 引言
从九十年代初到现在,DGPS定位技术已在石油、地矿、疏浚等许多行业广泛应用,甚至作为工程项目的承包条件。DGPS定位技术一经应用,立即产生了巨大的经济效益,就拿疏浚工程测量来说,采用传统定位方法进行疏浚工程测量,一个班组至少需要6人,而采用GPS定位,4人就足够了。内业处理速度快也是采用DGPS定位技术一大优点,采用传统方法一天测量外业,至少需要两天时间进行内业处理,而内外业一体化的测量手段大量使用计算机技术,一天测量外业,只要半天进行内业处理就足够了。总之,DGPS定位技术的广泛应用为测量行业带来了革命性的变革,把测量行业带入了一个崭新的时代。
常用的差分GPS一般有两种方法。一种是伪距差分加载波相位平滑技术,定位精度可小于±1米。另一种是采用载波相位差分技术,三维定位精度可达到厘米级,常采用这种定位技术进行高精度的工程放样等工作。
随着GPS定位技术的广泛应用,到二十世纪末,我国在沿海地区利用原有的指向标台站建立了沿海指向标差分GPS定位系统,该系统共有20多个台站,发射功率覆盖了我国整个沿海地区。因此在沿海地区进行DGPS作业更加方便。在DGPS的应用中,坐标转换是人们普遍关心的一个问题。坐标转换的方法有多种,在这里不再赘述,下面仅就在独立坐标系中使用DGPS定位技术进行一些探讨。
对于一些小的工程项目或该工程项目的控制网无法与国家控制网进行联测,这样的工程项目经常采用独立坐标系。下面就笔者在非洲苏丹国苏丹港“绿地”疏浚与吹填工程项目中DGPS的使用经验作一总结,以资交流。
2 工程概况
苏丹位于非洲的东北部,是非洲面积最大的国家,同时也是世界上最贫穷、落后的国家之一。苏丹港位于苏丹东北部,濒临红海,凭借一个天然的港湾建立了苏丹唯一的货物港口,共有20个深水泊位。“绿地”疏浚与吹填项目位于苏丹港出口左侧,计划新建两个泊位。我们承担的是该工程的施工测量工作。
3 原有控制网情况
苏丹是一个贫穷、落后的国家,国家基础建设很差。苏丹港只有一套英国人在二十世纪七十年代建立的控制网,但现在可利用的控制点已遭到破坏。因此,现场没有任何可以利用的控制资料。
4 施工GPS控制网的建立
由于业主不能提供任何控制资料,设计单位进行工程设计时,在现场假定一点(X=10000,Y=10000)作为坐标系原点,建立了施工坐标系 — C-D坐标系。该坐标系D坐标轴为拟建码头的前沿线,C坐标轴与D坐标轴垂直(右手系),且规定D坐标轴正向与真北方向的夹角为11.73292394°,其又提供了C-D坐标系与另一在建项目的坐标系(独立坐标系)的转换关系。我们以在建项目的坐标系为基础,在“绿地”施工区沿岸布设了4个控制点,为了管理岸台方便,我们又在经理部楼顶布设一点,这样就形成了“绿地”疏浚工程项目的施工GPS控制网(如下图)。
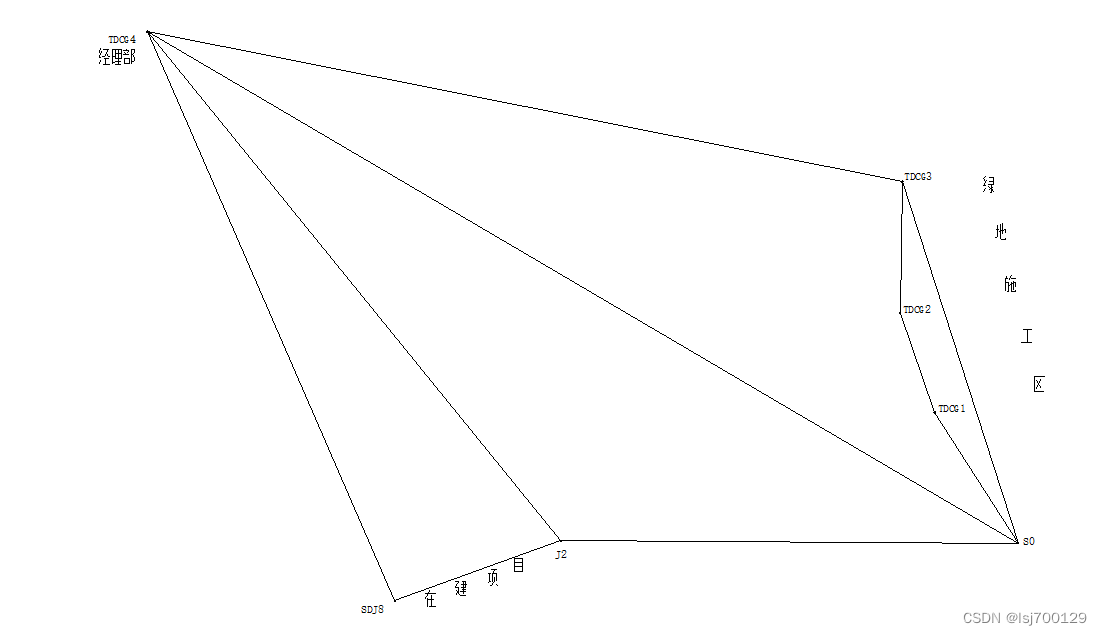
图1 “绿地”GPS控制网略图
5 GPS静态控制测量
我们制定了严密的外业观测计划,利用三台套Leica SR510 GPS接收机进行了为期一天的外业观测,每条基线至少观测30分钟,共观测了10条基线。
内业数据处理采用Leica公司的商用软件 — SKI-Pro基线解算及平差处理软件,经内业处理后,由7条基线组成的最大异步环的环线闭合差为7.3mm,相对闭合差为1:843122。
然后进行三维无约束平差,平差结果良好,各项限差和检验均达到精度指标。
6 各控制点C-D坐标的求取
把在建项目控制网中的两已知点的坐标代入经三维无约束平差的GPS控制网中,进行一步法(强制符合法)转换,得到各控制点在在建项目控制网中的坐标。从转换结果看,WGS-84网符合到在建项目控制网的转换精度比较好,精度满足要求。然后利用设计单位提供的转换关系,求得各控制点在C-D坐标系中的坐标(见表一)。
表一:
| 点名 | C | D |
| S0 | 10012.467 | 9568.592 |
| TDCG1 | 9800.295 | 9900.929 |
| TDCG2 | 9712.616 | 10153.229 |
| TDCG3 | 9718.005 | 10487.957 |
| TDCG4 | 7796.329 | 10869.184 |
7 WGS-84坐标系到C-D坐标系的转换参数的计算
经上述GPS控制网的无约束平差和附加已知点后的一步法转换计算,再经过控制点的平面变换,我们得到了“绿地”疏浚与吹填项目施工控制网中各点的C、D坐标。至此,我们已可以采用常规方法进行施工船舶的定位和施工区域的放样工作,但在施工组织设计中我们拟定采用DGPS定位技术进行施工船舶的导航和测量定位。因此,计算WGS-84坐标系到C-D坐标系的转换参数成了一个非常重要的问题,由于C-D坐标系为独立坐标系,未与任何国家控制网进行联测,不存在选择椭球的问题,所以我们直接从WGS-84坐标系向C-D坐标系进行转换,坐标转换方法为二维平面转换,即先投影,再转换。
7.1 确定WGS-84坐标系,求取各点在WGS-84坐标系中的平面坐标
在整个GPS控制网的施测过程中,安置在TDCG4点( 经理部楼顶)的GPS接收机的观测时间最长,约3.5个小时。因此在解算基线时以该点作为起算点,首先进行单点定位计算,(平面精度为±0.15m,),然后解算各条基线。基线解算完毕后,进行三维无约束平差(前面已完成)。把TDCG4点的单点定位解作为已知值,代入WGS-84网中进行约束平差,求得各点的WGS-84坐标。
独立坐标系的控制范围一般较小,为减小投影变形的影响,一般采用独立带投影,选取通过测区中心的子午线作为投影的中央子午线。
在该控制网中,我们采用高斯投影,投影参数为:
椭球:WGS-84
中央子午线:37°14′
中央子午线投影变形比:1
Y坐标加常数:500000米
投影后得各控制点在WGS-84坐标系的平面坐标。
7.2 应用最小二乘原理,求取WGS-84坐标系到C-D坐标系的转换参数
当新、旧坐标系统的重合点较多(超过两个)时,为提高转换精度,我们应用最小二乘原理先对坐标换算元素进行平差,然后再应用这些元素将一个直角坐标系统换算至另一个直角坐标系统,重合点应选在测区四周。在一般情况下,基本的变换公式为:
x=p+k*X*cosα-k*Y*sinα
y=q+k*Y*cosα+k*X*sinα
上式中:x,y----点在新坐标系统内的坐标;
X,Y----点在旧坐标系统内的坐标;
p,q----旧坐标系统的原点在新坐标系统内的坐标数值;
α------新、旧坐标系统的坐标轴的夹角;
k-------新、旧坐标系统的长度变形比。
上面,我们已经求得了各控制点在WGS-84坐标系和C-D坐标系中的两套坐标。为保证转换精度,我们选取位于测区周围的TDCG4、SCJ8、S0、TDCG3四点(见表二)进行转换计算,其余的点作为校核。
表二:
| 点名 | C | D | Y | X |
| TDCG4 | 7796.329 | 10869.184 | 498614.314 | 2170382.306 |
| SCJ8 | 8426.574 | 9422.096 | 498928.136 | 2168835.479 |
| S0 | 10012.467 | 9568.592 | 500509.580 | 2168647.237 |
| TDCG3 | 9718.005 | 10487.957 | 500413.805 | 2169607.822 |
经计算,得转换公式:
C=C0 + k*X*COSα- k*Y*SINα
D=D0 + k*Y*COSα+ k*X*SINα
上式中:CO=-26118.186
D0=-2215844.810
α=12.065791644441°
k=1.000023170514
把上述投影参数和转换关系代入导航、测量软件的大地参数模块的相应位置,即可在导航、测量时实时采用C-D坐标系,简化了操作环节,充分利用了软、硬件的功能。
8 校核
为了保证转换精度,我们对该组转换参数进行了校核。
首先,以TDCG1为校核点,利用求得的转换参数,把该点的WGS-84坐标(经、纬度)转换为C-D坐标系的坐标,与控制网整体平差所求得的TDCG1点的坐标进行比较(见表三)。
表三:
| 类 别 | C坐标(m) | D坐标(m) |
| 由转换参数计算 | 9800.294 | 9900.930 |
| 由整体平差所得 | 9800.295 | 9900.929 |
| 差 值 | -0.001 | +0.001 |
由上表可知,两种方法所求得的TDCG1点坐标相差在毫米级。
其次,我们在TDCG4点(经理部楼顶)架设差分基准台,每3秒发射一次差分改正数,在TDCG1点架设移动台,进行差分GPS观测,每秒采集一组数据,观测时间为2个小时。经过对采集的坐标数据进行统计分析,得出外符合精度为±0.273m。
由以上两点可知,采用上述方法所求得的转换参数是可靠的,完全可以满足导航、测量定位的精度要求。
9 结束语
上述方法是在导航、测量软件中进行坐标转换,要想使用上述方法,必须要选择合适的软件,象HYPACK MAX,南方测绘仪器公司的S-CASS等软件均能完成上述功能。另外,我们也可以选取适当的GPS接收机,在GPS接收机内完成上述转换,从GPS接收机中直接输出独立坐标系的坐标,象Leica 500系统的GPS接收机就具有该功能。总之,实现上述转换具有许多方法,每种方法都有优缺点,我们可根据工程具体条件合理选择。















 1401
1401

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









